

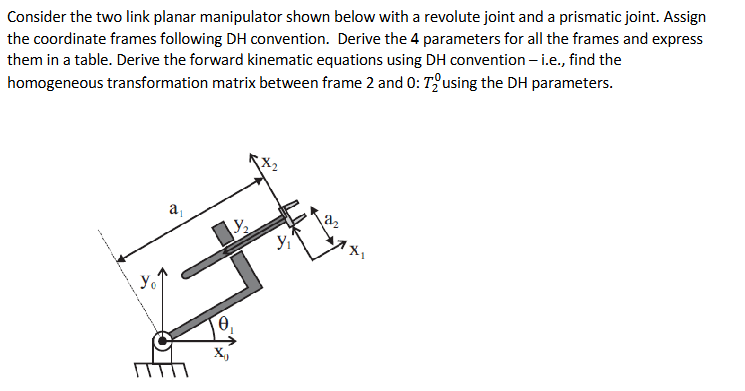
Question: Consider the two link planar manipulator shown below with a revolute joint and a prismatic joint. Assign the coordinate frames following DH convention. Derive the
Consider the two link planar manipulator shown below with a revolute joint and a prismatic joint. Assign
the coordinate frames following DH convention. Derive the parameters for all the frames and express
them in a table. Derive the forward kinematic equations using DH convention ie find the
homogeneous transformation matrix between frame and : using the DH parameters.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock