

Question: Figure 5 . Robot Arm for Problem 6 . This robot has an offset in the shoulder joint that slightly complicates it forward kinematics. The
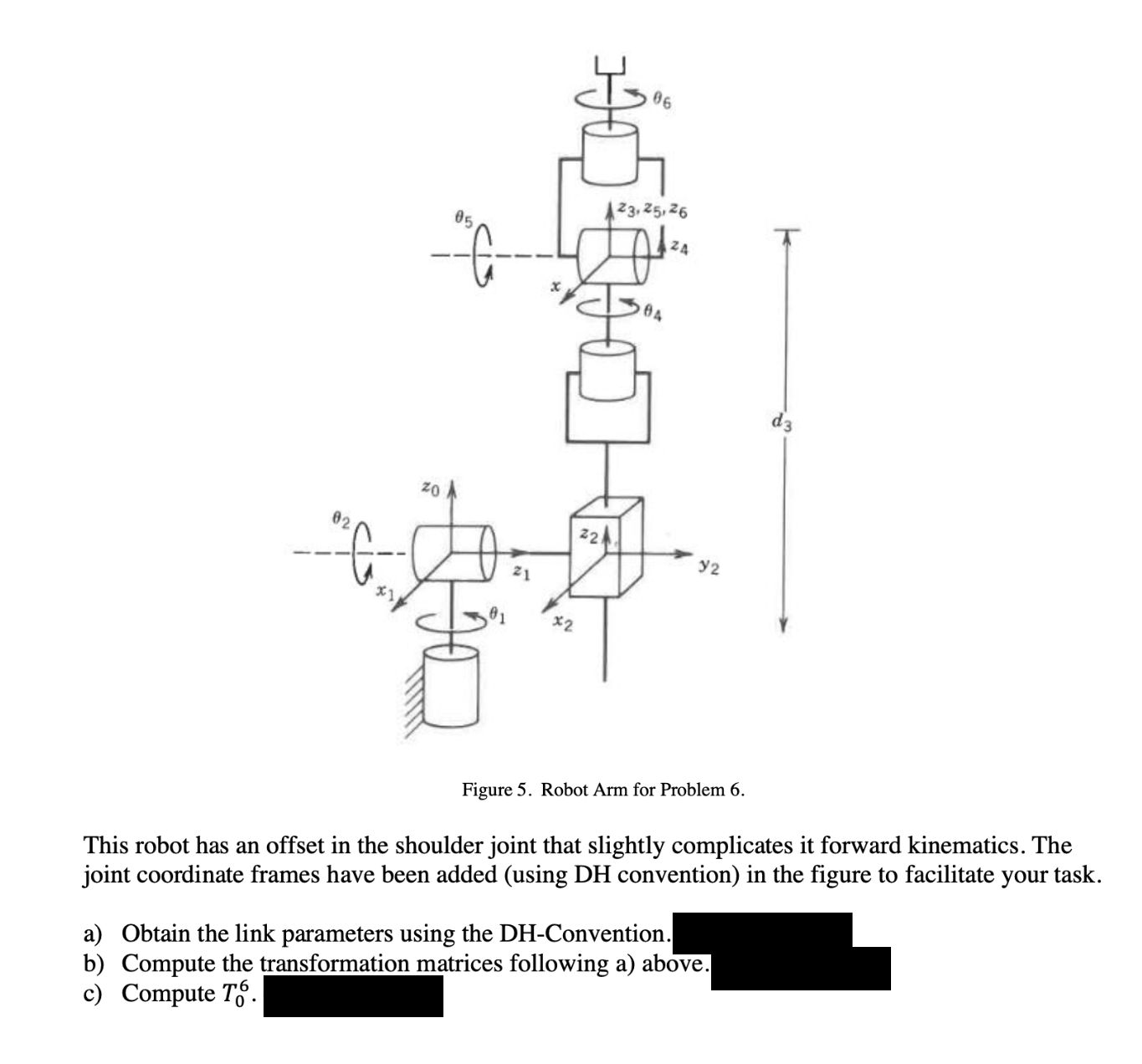
Figure Robot Arm for Problem
This robot has an offset in the shoulder joint that slightly complicates it forward kinematics. The joint coordinate frames have been added using DH convention in the figure to facilitate your task.
a Obtain the link parameters using the DH Convention.
b Compute the transformation matrices following a above.
c Compute T
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock