

Question: For the block diagram, shown in Fig. (1), it is required to design a PID controller such that the closed-loop poles approximately have =
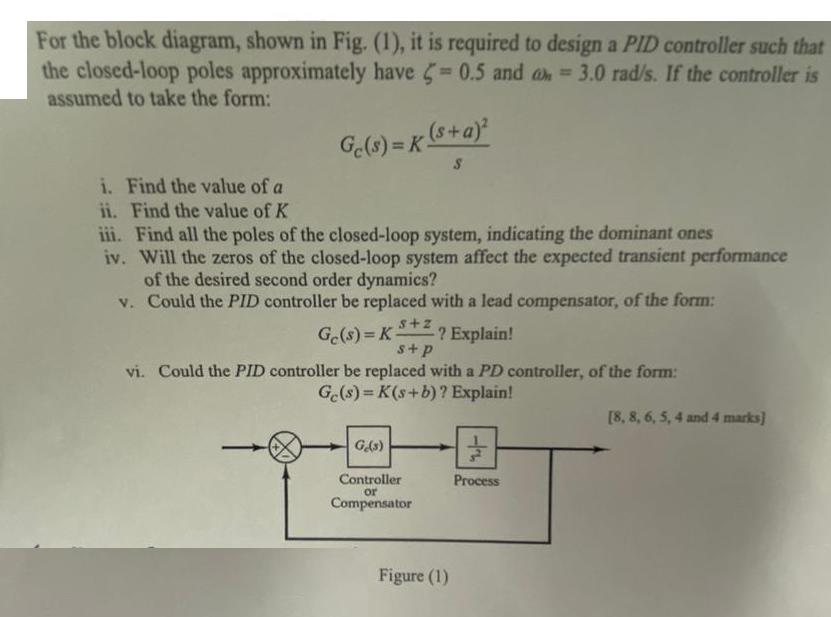
For the block diagram, shown in Fig. (1), it is required to design a PID controller such that the closed-loop poles approximately have = 0.5 and am = 3.0 rad/s. If the controller is assumed to take the form: Gc(s) = K (s+a) S i. Find the value of a ii. Find the value of K iii. Find all the poles of the closed-loop system, indicating the dominant ones iv. Will the zeros of the closed-loop system affect the expected transient performance of the desired second order dynamics? v. Could the PID controller be replaced with a lead compensator, of the form: Ge(s)=KS+z -? Explain! s+ p vi. Could the PID controller be replaced with a PD controller, of the form: Ge(s)=K(s+b)? Explain! G.(s) Controller or Compensator Figure (1) Process [8, 8, 6, 5, 4 and 4 marks]
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts