

Question: Forward Kinematics 1 . The manipulator arm shown below has two revolute joints, with ( mathrm { L } _ { 1 }
Forward Kinematics
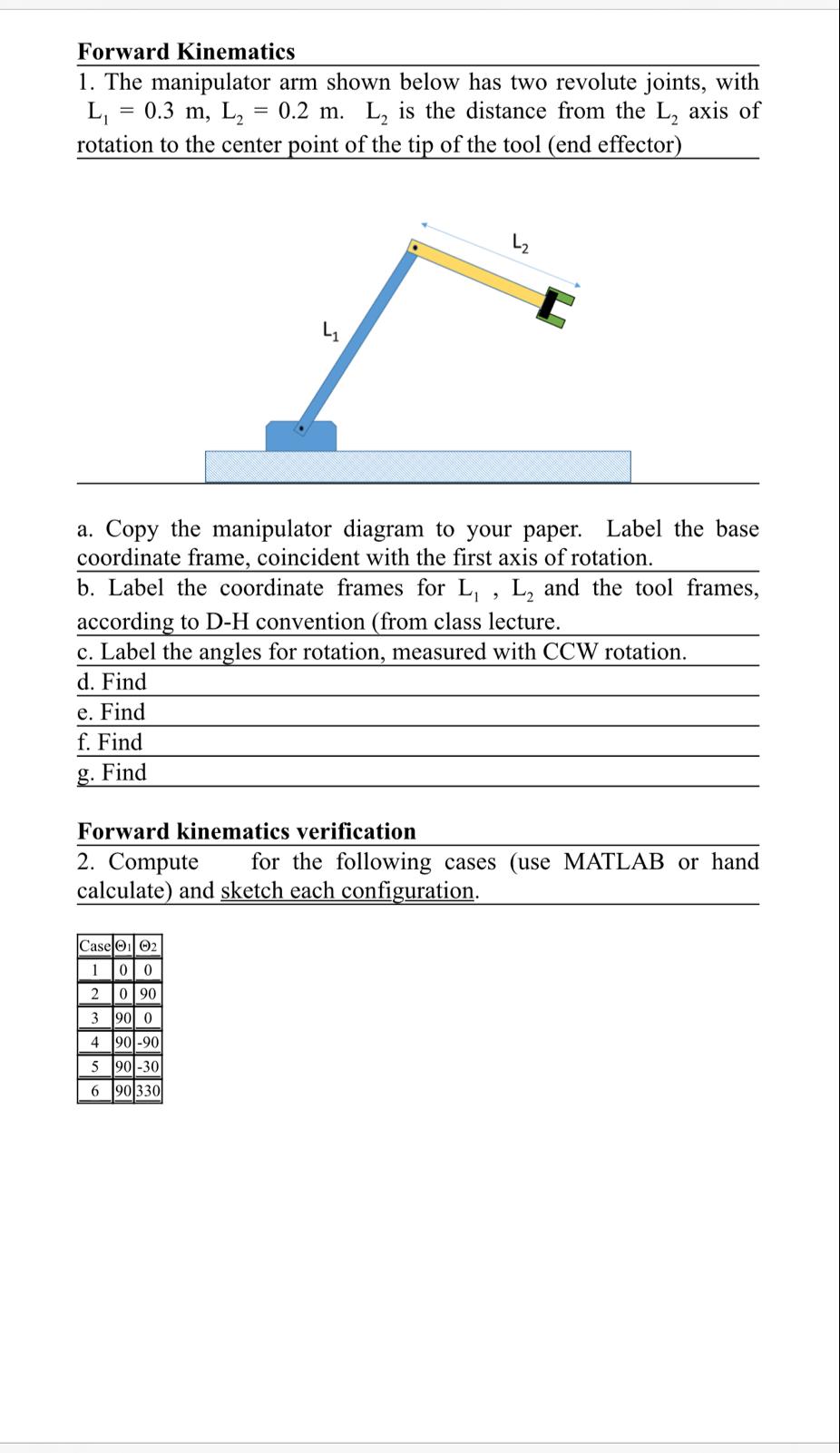
The manipulator arm shown below has two revolute joints, with mathrmLmathrm~mmathrm~Lmathrm~mmathrmL is the distance from the mathrmL axis of rotation to the center point of the tip of the tool end effector
a Copy the manipulator diagram to your paper. Label the base coordinate frame, coincident with the first axis of rotation.
b Label the coordinate frames for mathrmLmathrm~L and the tool frames, according to DH convention from class lecture.
c Label the angles for rotation, measured with CCW rotation.
d Find
e Find
f Find
g Find
Forward kinematics verification
Compute for the following cases use MATLAB or hand calculate and sketch each configuration.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock