

Question: Group ( 3 ) For the following Robot DH - parameter Table, solve the inverse kinematics using the Newton Raphson method to solve for the
Group
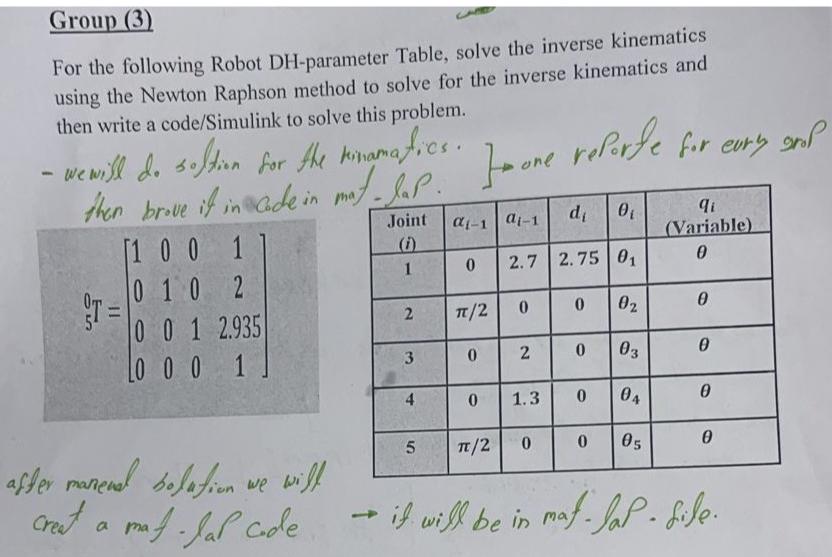
For the following Robot DHparameter Table, solve the inverse kinematics using the Newton Raphson method to solve for the inverse kinematics and then write a codeSimulink to solve this problem.
wewill do soltion for the kinamafics.
Write the matlab code
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock