

Question: Group (3) For the following Robot DH-parameter Table, solve the inverse kinematics using the Newton Raphson method to solve for the inverse kinematics and
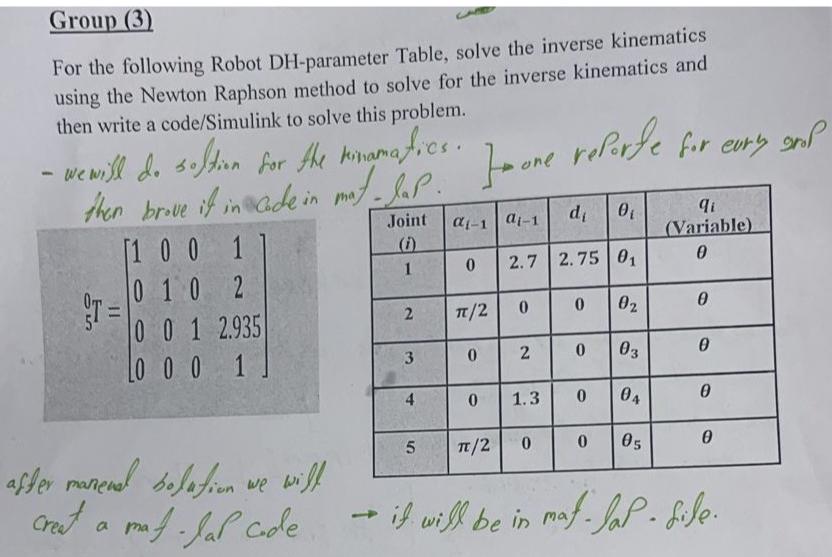
Group (3) For the following Robot DH-parameter Table, solve the inverse kinematics using the Newton Raphson method to solve for the inverse kinematics and then write a code/Simulink to solve this problem. - we will do softion for the kinamafics. then brove it in ace in mat da. Joint [1 0 0 1 (i) 1 0 1 0 2 T = 0 0 1 2.935 0 0 0 1 after monend befation we will creat a mat - Jal code. 2 3 4 Imone reporte for eary stil d 0 0 2.7 2.75 0 5 -1 a-1 TT/2 0 0 TT/2 0 2 1.3 0 0 0 0 0 0 03 04 05 qi (Variable) 0 0 0 0 0 it will be in maf - Sat - sile.
Step by Step Solution
There are 3 Steps involved in it
To solve the inverse kinematics problem for the given Robot DHparameter Table using the NewtonRaphso... View full answer

Get step-by-step solutions from verified subject matter experts