

Question: in Scilab 5. In control systems analysis, transfer functions are developed that mathematically relate the dynamics of a system's input to its output. A transfer
 in Scilab
in Scilab
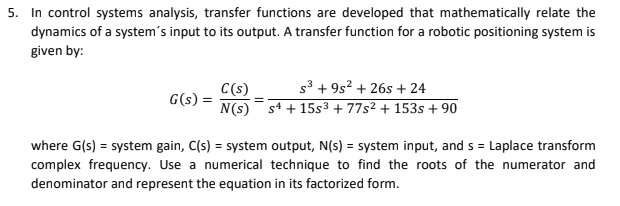
5. In control systems analysis, transfer functions are developed that mathematically relate the dynamics of a system's input to its output. A transfer function for a robotic positioning system is given by: s3 +9s2 26s 24 C(s) S15s3+77s +153s+90 where G(s) system gain, C(s) system output, N(s) system input, and s Laplace transform complex frequency. Use a numerical technique to find the roots of the numerator and denominator and represent the equation in its factorized form
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock