

Question: Particles will be spread randomly over the determined Initiate random particles at { x p } Particles share the same as robots that is used
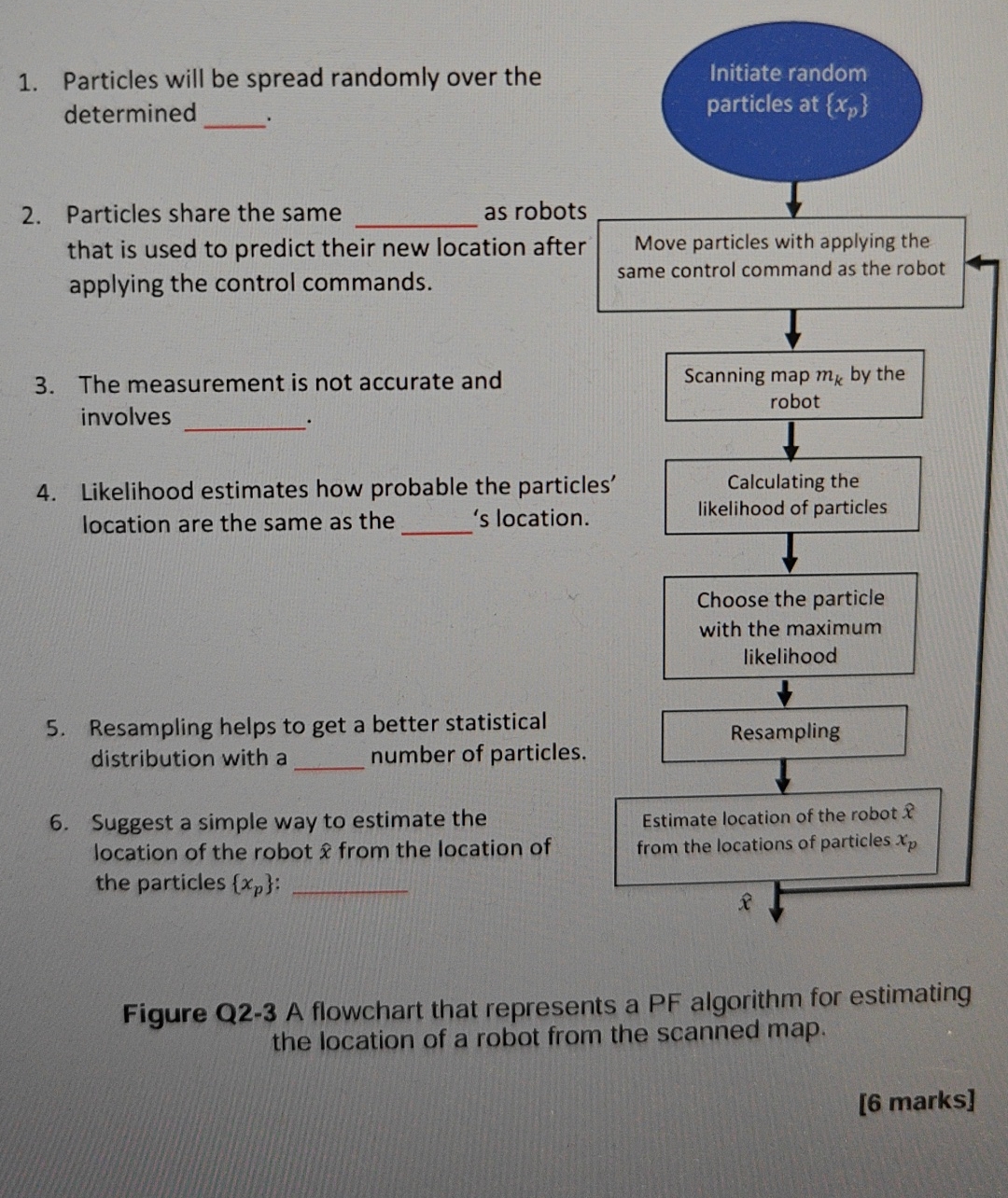
Particles will be spread randomly over the determined
Initiate random
particles at
Particles share the same as robots that is used to predict their new location after applying the control commands.
The measurement is not accurate and involves
Likelihood estimates how probable the particles' location are the same as the s location.
Resampling helps to get a better statistical distribution with a number of particles.
Suggest a simple way to estimate the location of the robot hat from the location of the particles :
Estimate location of the robot hat from the locations of particles
hat
Figure Q A flowchart that represents a PF algorithm for estimating the location of a robot from the scanned map.
marks
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock