

Question: please help do this problem Problem 1: Design a fourbar Grashof crank-rocker to give 60 of rocker rotation with equal time forward and back, from
 please help do this problem
please help do this problem 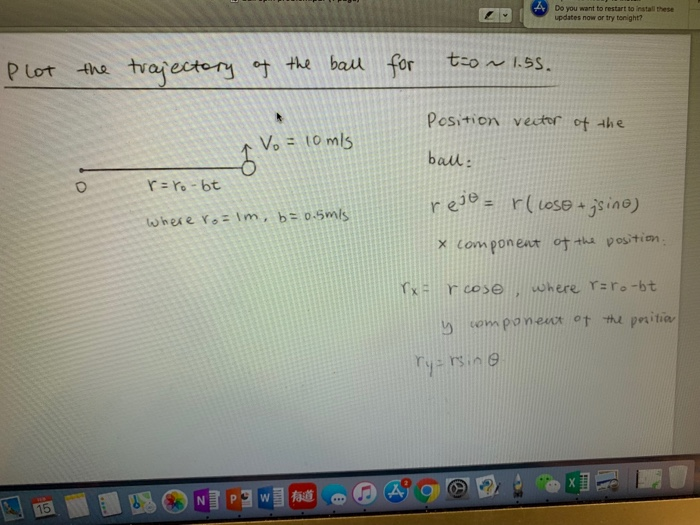
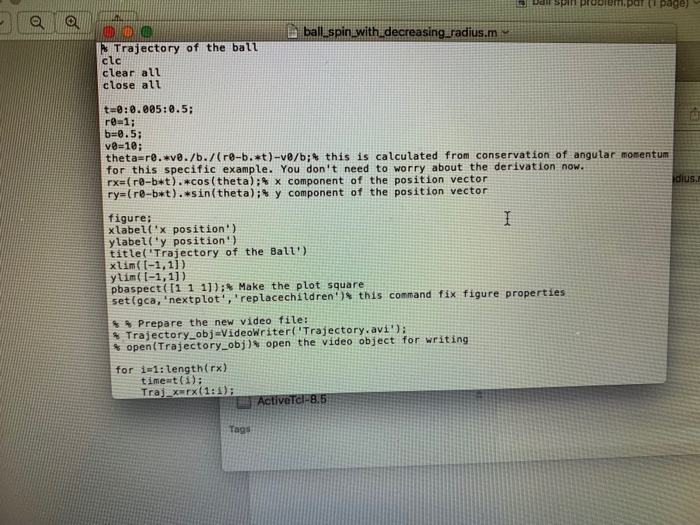
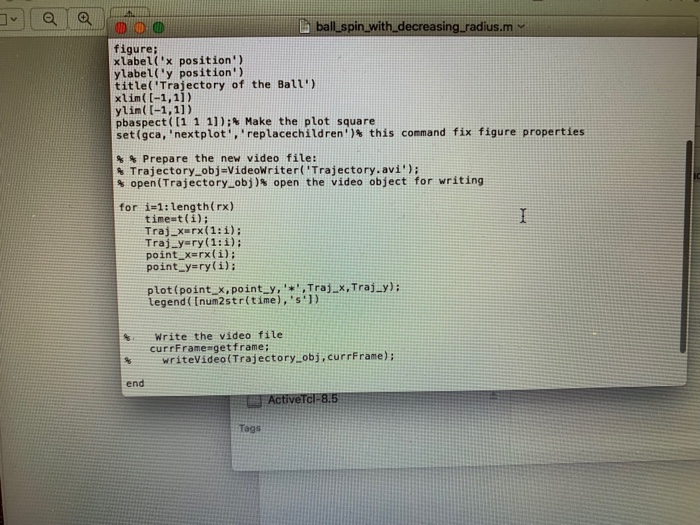
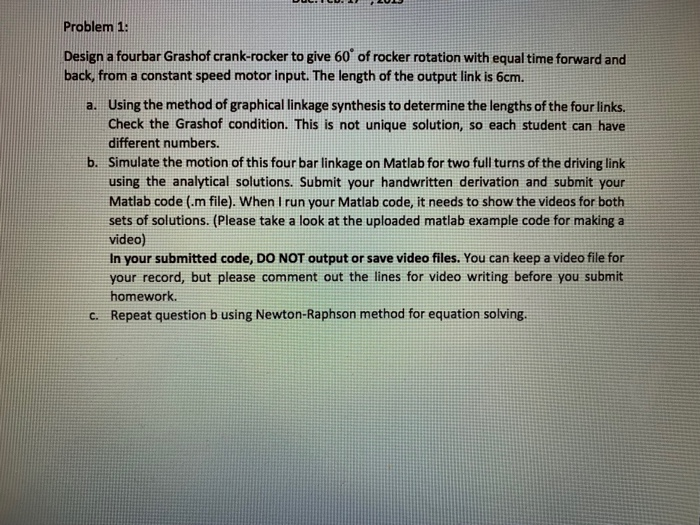
Problem 1: Design a fourbar Grashof crank-rocker to give 60 of rocker rotation with equal time forward and back, from a constant speed motor input. The length of the output link is 6cm. Using the method of graphical linkage synthesis to determine the lengths of the four links. Check the Grashof condition. This is not unique solution, so each student can have different numbers. Simulate the motion of this four bar linkage on Matlab for two full turns of the driving link using the analytical solutions. Submit your handwritten derivation and submit your Matlab code (.m file). When I run your Matlab code, it needs to show the videos for both sets of solutions. (Please take a look at the uploaded matlab example code for making a video) In your submitted code, DO NOT output or save video files. You can keep a video file for your record, but please comment out the lines for video writing before you submit homework. a. b. c. Repeat question b using Newton-Raphson method for equation solving 2 Do you want to restart to install these updates now or try tonight? PLot ths trajestee bast for tio u kss. position vedo ct4he bal: r ee-r(lose +sino) X Com ponent ot tha positim to her e ro-lm, b=0-5m/s TxHcOseiwhere Taro -bt Dal spn probiem.par fr pagej G ball spin with.decreasing radius.m s Trajectory of the ball clc clear alu close alt t8:0.005:0.5 re-1; b 8.5; ve#10; theta-re.ve./b./(re-b.*t)-ve/b;* this is calcutated from conservation of angutar momentum for this specific example. You don't need to worry about the derivation now rxs(re-b*t).*cos(theta);% x component of the position vector rys (ro-bat),*sin(theta);% y component of the position vector figure: xlabel('x position') ylabe('y position') title Trajectory of the Ball') xlim(t-1,11) ytim(-1,11) pba spect([11 11);% Make the plot square set(gca,'nex t plot','replacechildren')% this command fix figure properties s & Prepare the new video file: % Trajectory-objaVideoWriter(Trajectory.avi.); open (Trajectory.-obj)% open the video object for writing for i-1:length(rx) time t(i): Trai xrx(1:i) Tags ball spin with.decreasing-radius.m v figure; xlabel( 'x position') ylabel('y position') title( 'Trajectory of the Ball') ylim(I-1,1]) pbaspect([1 1 1]);% Make the plot square set(gca,'nex t plot','replacechildren')% this command fix figure properties % % Prepare the new video file: & Trajectory obj-Videowriter( Trajectory.avi' % open(Trajectory-obj)% open the video object for writing i#1 :1ength( rx) timest(i); Traj_x.rx(1:1); Traj y ry(1:i): point_ x-rx(i); point yery(i)i for plot (point_x, point-y,' *' ,Traj-x,Traj-) ; tegend (Inum2str(time), 's'1) write the video file currFrame getframe; %, writeVideo(Trajectory obj, currFrame); end Tags Problem 1: Design a fourbar Grashof crank-rocker to give 60 of rocker rotation with equal time forward and back, from a constant speed motor input. The length of the output link is 6cm. Using the method of graphical linkage synthesis to determine the lengths of the four links. Check the Grashof condition. This is not unique solution, so each student can have different numbers. Simulate the motion of this four bar linkage on Matlab for two full turns of the driving link using the analytical solutions. Submit your handwritten derivation and submit your Matlab code (.m file). When I run your Matlab code, it needs to show the videos for both sets of solutions. (Please take a look at the uploaded matlab example code for making a video) In your submitted code, DO NOT output or save video files. You can keep a video file for your record, but please comment out the lines for video writing before you submit homework. a. b. c. Repeat question b using Newton-Raphson method for equation solving 2 Do you want to restart to install these updates now or try tonight? PLot ths trajestee bast for tio u kss. position vedo ct4he bal: r ee-r(lose +sino) X Com ponent ot tha positim to her e ro-lm, b=0-5m/s TxHcOseiwhere Taro -bt Dal spn probiem.par fr pagej G ball spin with.decreasing radius.m s Trajectory of the ball clc clear alu close alt t8:0.005:0.5 re-1; b 8.5; ve#10; theta-re.ve./b./(re-b.*t)-ve/b;* this is calcutated from conservation of angutar momentum for this specific example. You don't need to worry about the derivation now rxs(re-b*t).*cos(theta);% x component of the position vector rys (ro-bat),*sin(theta);% y component of the position vector figure: xlabel('x position') ylabe('y position') title Trajectory of the Ball') xlim(t-1,11) ytim(-1,11) pba spect([11 11);% Make the plot square set(gca,'nex t plot','replacechildren')% this command fix figure properties s & Prepare the new video file: % Trajectory-objaVideoWriter(Trajectory.avi.); open (Trajectory.-obj)% open the video object for writing for i-1:length(rx) time t(i): Trai xrx(1:i) Tags ball spin with.decreasing-radius.m v figure; xlabel( 'x position') ylabel('y position') title( 'Trajectory of the Ball') ylim(I-1,1]) pbaspect([1 1 1]);% Make the plot square set(gca,'nex t plot','replacechildren')% this command fix figure properties % % Prepare the new video file: & Trajectory obj-Videowriter( Trajectory.avi' % open(Trajectory-obj)% open the video object for writing i#1 :1ength( rx) timest(i); Traj_x.rx(1:1); Traj y ry(1:i): point_ x-rx(i); point yery(i)i for plot (point_x, point-y,' *' ,Traj-x,Traj-) ; tegend (Inum2str(time), 's'1) write the video file currFrame getframe; %, writeVideo(Trajectory obj, currFrame); end Tags
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts