

Question: problem I 1 R CPI compensation) 60 New (A mindre correction sto Yis) Controller plant find to is design in Fig. 1 The objective of
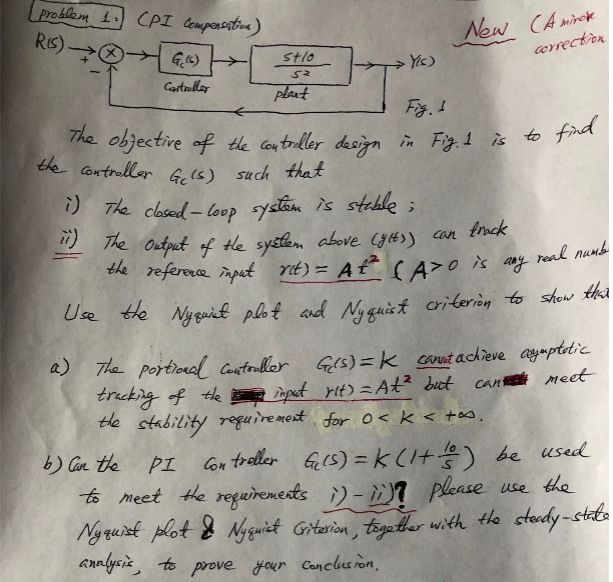
problem I 1 R CPI compensation) 60 New (A mindre correction sto Yis) Controller plant find to is design in Fig. 1 The objective of the contraller design in Fig. I is the controller Gels) such that i) The closed- loop system is stable 1) The output of the system above cytts) can track the reference input ret) = A CA>O is any real! Use the Nyquist plot and Nyquist criterion to show that The portional Controller GIS)=k cant achieve ayuptetic tracking of the input rit) = At but can meet the stability requirement for oak O is any real! Use the Nyquist plot and Nyquist criterion to show that The portional Controller GIS)=k cant achieve ayuptetic tracking of the input rit) = At but can meet the stability requirement for oak
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts