

Question: QN 15..please answer A rotation matrix R for rotation around an arbitrary vector by some angle can be expressed as the product of three rotations
 QN 15..please answer
QN 15..please answer
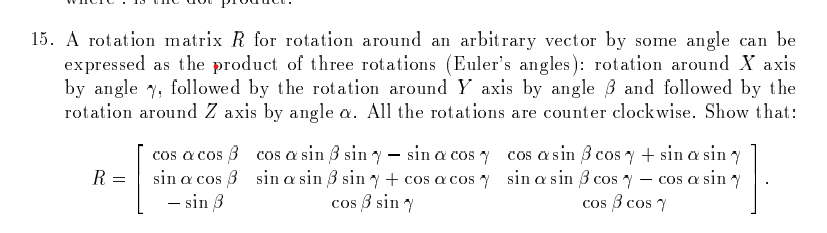
A rotation matrix R for rotation around an arbitrary vector by some angle can be expressed as the product of three rotations (Euler's angles): rotation around X axis by angle , followed by the rotation around Y axis by angle and followed by the rotation around Z axis by angle . All the rotations are counter clockwise. Show that: R=coscossincossincossinsinsincossinsinsin+coscoscossincossincos+sinsinsinsincoscossincoscos
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock