

Question: Stepper Motor Position Control using PIC microcontroller.Description: Design an open loop bidirectional position control system to derive a stepper motor to thedesired position. The system
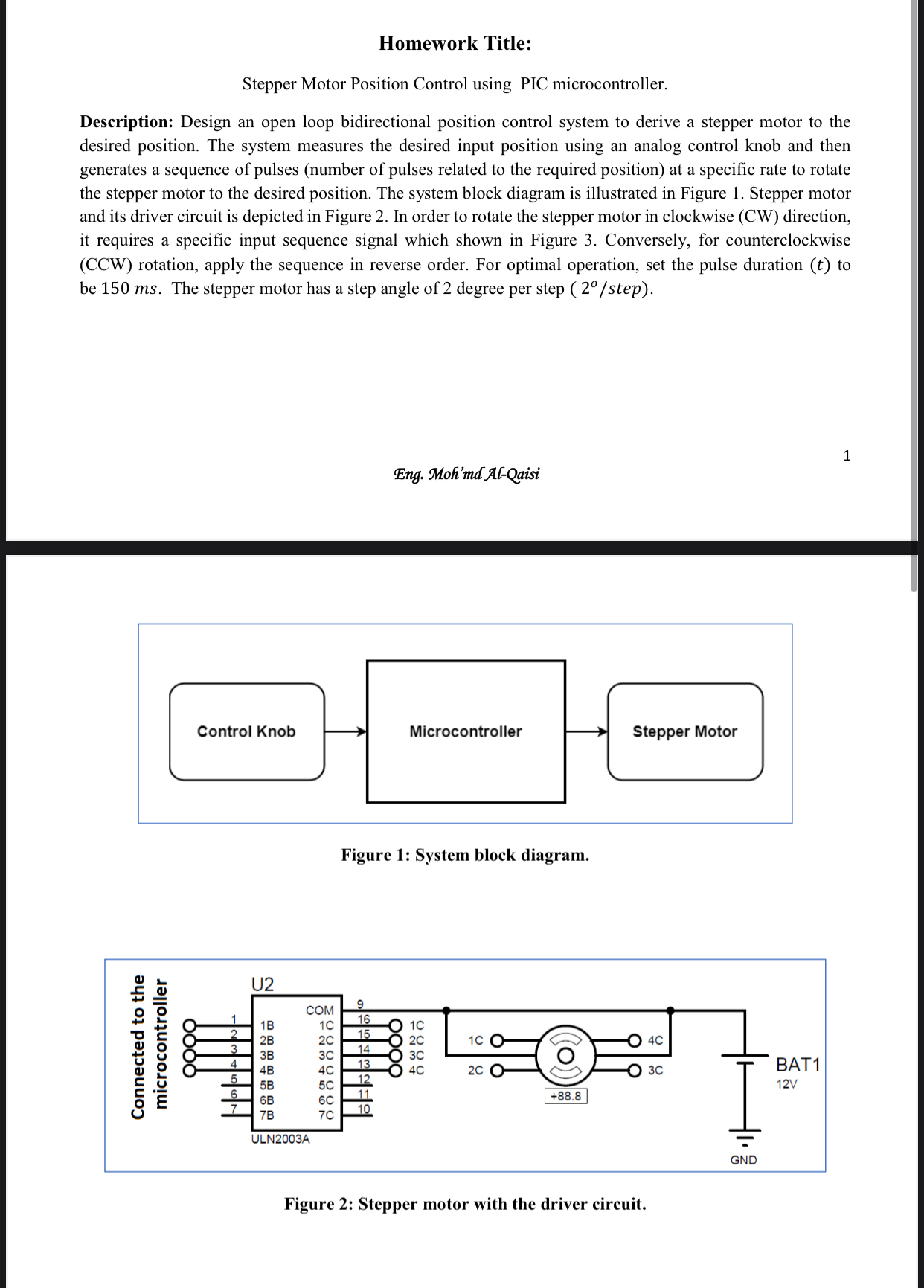
Stepper Motor Position Control using PIC microcontroller.Description: Design an open loop bidirectional position control system to derive a stepper motor to thedesired position. The system measures the desired input position using an analog control knob and then generates a sequence of pulses number of pulses related to the required position at a specific rate to rotate the stepper motor to the desired position. The system block diagram is illustrated in Figure Stepper motor and its driver circuit is depicted in Figure In order to rotate the stepper motor in clockwise CW direction, it requires a specific input sequence signal which shown in Figure Conversely, for counterclockwise CCW rotation, apply the sequence in reverse order. For optimal operation, set the pulse duration t to be ms The stepper motor has a step angle of degree per step deg step
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock