

Question: The project is to design a controller for a mixer. A black dye for making shirts is injected into a stream of water. The injected
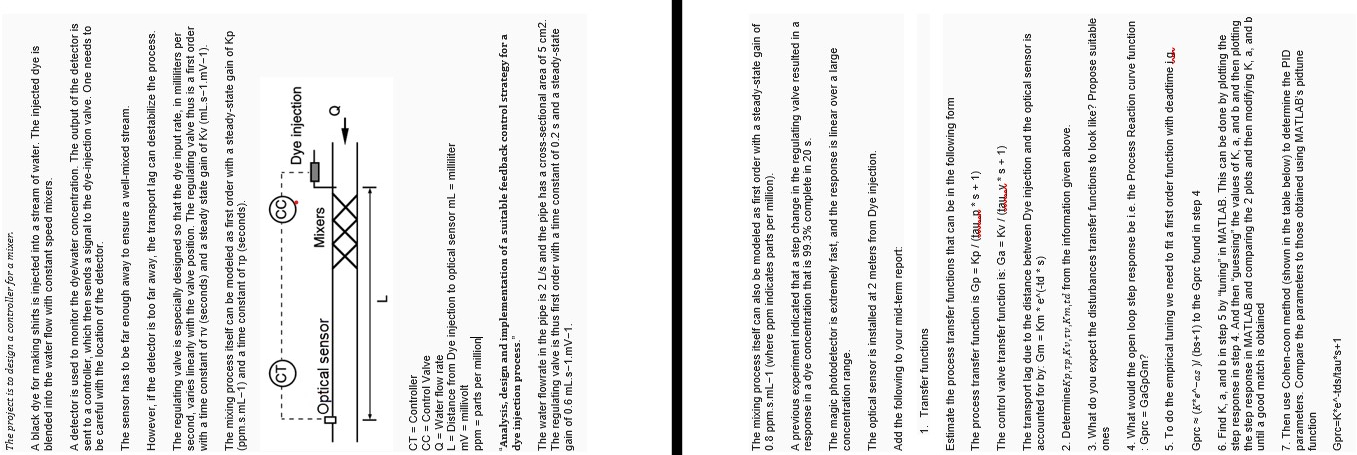
The project is to design a controller for a mixer.
A black dye for making shirts is injected into a stream of water. The injected dye is
blended into the water flow with constant speed mixers.
A detector is used to monitor the dyewater concentration. The output of the detector is
sent to a controller, which then sends a signal to the dyeinjection valve. One needs to
be careful with the location of the detector.
The sensor has to be far enough away to ensure a wellmixed stream.
However, if the detector is too far away, the transport lag can destabilize the process.
The regulating valve is especially designed so that the dye input rate, in milliliters per
second, varies linearly with the valve position. The regulating valve thus is a first order
with a time constant of seconds and a steady state gain of
The mixing process itself can be modeled as first order with a steadystate gain of
ppmsmL and a time constant of seconds
"Analysis, design and implementation of a suitable feedback control strategy for a
dye injection process."
The water flowrate in the pipe is and the pipe has a crosssectional area of
The regulating valve is thus first order with a time constant of and a steadystate
gain of
The mixing process itself can also be modeled as first order with a steadystate gain of
where ppm indicates parts per million
A previous experiment indicated that a step change in the regulating valve resulted in a
response in a dye concentration that is complete in
The magic photodetector is extremely fast, and the response is linear over a large
concentration range.
The optical sensor is installed at meters from Dye injection.
Add the following to your midterm report:
Transfer functions
Estimate the process transfer functions that can be in the following form
The process transfer function is aubaR
The control valve transfer function is: KvI taubal
The transport lag due to the distance between Dye injection and the optical sensor is
accounted for by:
Determine from the information given above.
What do you expect the disturbances transfer functions to look like? Propose suitable
ones
What would the open loop step response be ie the Process Reaction curve function
Gprc GaGpGm?
To do the empirical tuning we need to fit a first order function with deadtime ig
Gprc ~~ to the Gprc found in step
Find and in step by "tuning" in MATLAB. This can be done by plotting the
step response in step And then "guessing" the values of and and then plotting
the step response in MATLAB and comparing the plots and then modifying and
until a good match is obtained
Then use Cohencoon method shown in the table below to determine the PID
parameters. Compare the parameters to those obtained using MATLAB's pidtune
function
Gprc
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock