

Question: Consider 3R planar arm example from class shown below with L1-4m, L2-3m, and L3-2m. Li 91 Ro 0 4. Write a MATLAB program to perform
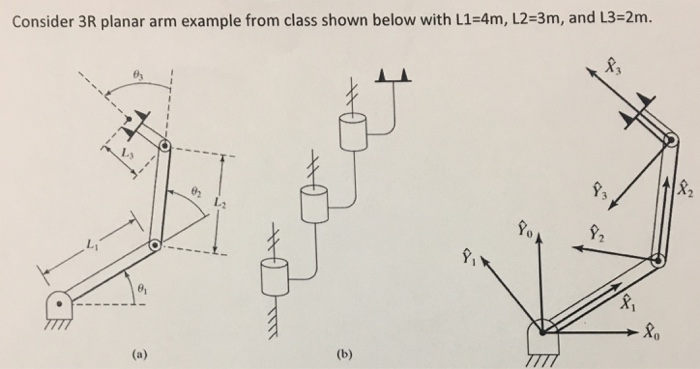
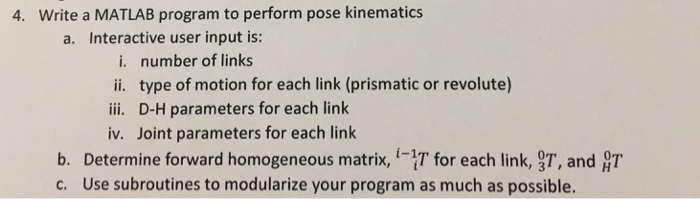
Consider 3R planar arm example from class shown below with L1-4m, L2-3m, and L3-2m. Li 91 Ro 0 4. Write a MATLAB program to perform pose kinematics a. Interactive user input is: i. number of links ii. type of motion for each link (prismatic or revolute) ii. D-H parameters for each link iv. Joint parameters for each link b. Determine forward homogeneous matrix,-1T for each link, T, andT c. Use subroutines to modularize your program as much as possible
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock