

Question: Problem 2 Consider the closed-loop system of Figure 2: Figure 2: Closed loop system The PD controller u(t)=K(e(t)+e(t)), which means: U(s)=K(s+1)E(s) The plant by itself
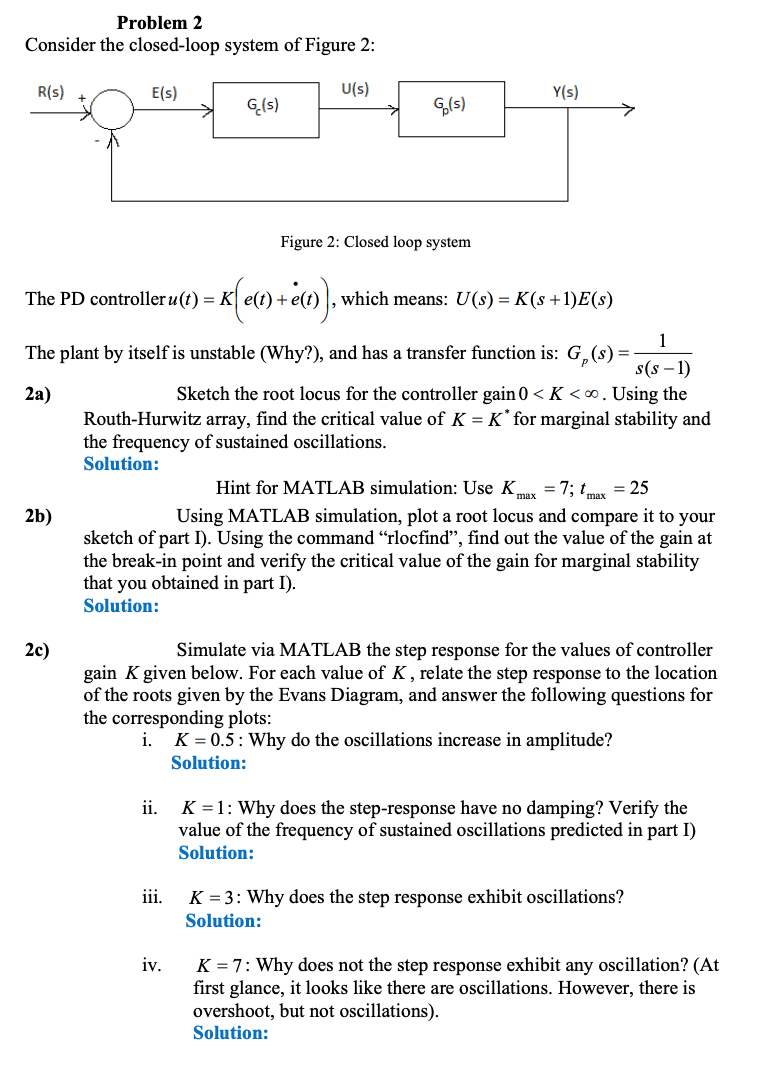
Problem 2 Consider the closed-loop system of Figure 2: Figure 2: Closed loop system The PD controller u(t)=K(e(t)+e(t)), which means: U(s)=K(s+1)E(s) The plant by itself is unstable (Why?), and has a transfer function is: Gp(s)=s(s1)1 2a) Sketch the root locus for the controller gain 0
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock