

Question: Suppose that we are asked to design a unity - feedback closed loop position controller for the plant ( a spring - mass - damper
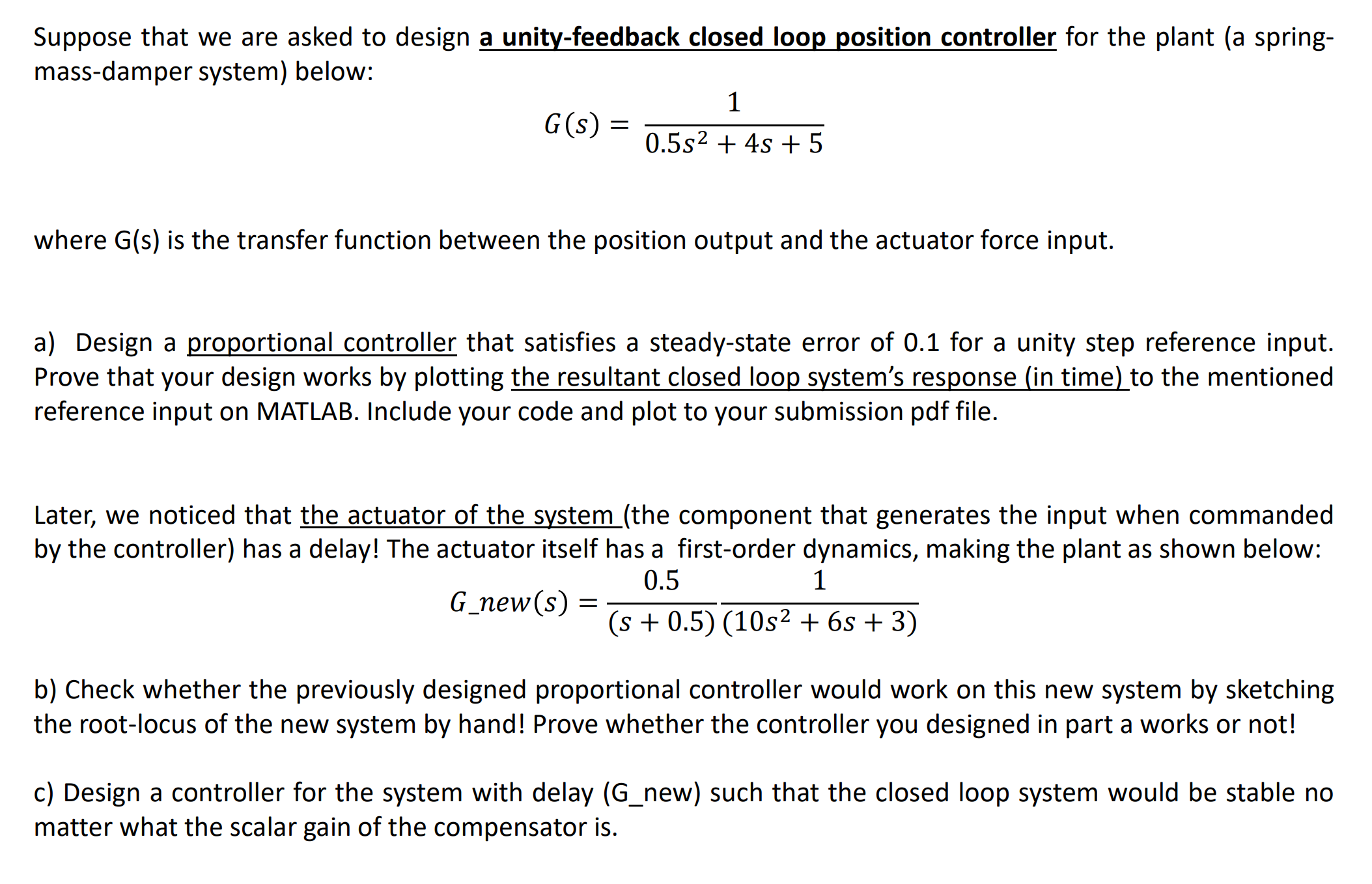
Suppose that we are asked to design a unityfeedback closed loop position controller for the plant a springmassdamper system below:
Gsfrac s s
where mathrmGmathrms is the transfer function between the position output and the actuator force input.
a Design a proportional controller that satisfies a steadystate error of for a unity step reference input. Prove that your design works by plotting the resultant closed loop system's response in time to the mentioned reference input on MATLAB. Include your code and plot to your submission pdf file.
Later, we noticed that the actuator of the system the component that generates the input when commanded by the controller has a delay! The actuator itself has a firstorder dynamics, making the plant as shown below:
G n e wsfracsfracleft s sright
b Check whether the previously designed proportional controller would work on this new system by sketching the rootlocus of the new system by hand! Prove whether the controller you designed in part a works or not!
c Design a controller for the system with delay Gnew such that the closed loop system would be stable no matter what the scalar gain of the compensator is
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock