

Question: Using MatLab show the implementation of Bug-0: A robot goes towards the goal. When it has faced with an obstacle follow the obstacle until the
Using MatLab show the implementation of Bug-0: A robot goes towards the goal. When it has faced with an obstacle follow the obstacle until the way to the goal is revealed. The algorithm is terminated when the goal is reached.
obstacle1.txt:
1 4 -8.052000 -6.720000 4.576000 7.933333 1.408000 8.353333 -11.000000 -5.040000 3 1 2 3 0 1
obstacle2.txt:
3
12 -8.140000 7.980000 -11.000000 6.953333 -12.320000 5.273333 -12.188000 3.406667 -11.088000 1.773333 -9.020000 1.120000 -7.304000 1.400000 -5.588000 2.286667 -4.224000 3.546667 -3.520000 5.413333 -4.312000 7.933333 -6.380000 8.586666
18 -9.108000 -9.613333 -8.888000 -10.593333 -7.612000 -10.686666 -5.500000 -9.566666 -3.124000 -7.420000 -0.088000 -4.106666 1.804000 -0.606667 3.256000 3.500000 4.268000 7.233333 5.148000 8.026666 5.148000 8.820000 4.488000 9.006666 2.728000 8.120000 1.188000 4.666666 0.484000 0.606667 -1.408000 -2.753333 -4.312000 -5.880000 -7.612000 -8.960000
6 7.832000 -0.980000 5.236000 -8.540000 9.988000 -10.500000 11.572000 -9.426666 7.524000 -7.793333 9.636000 -1.306667
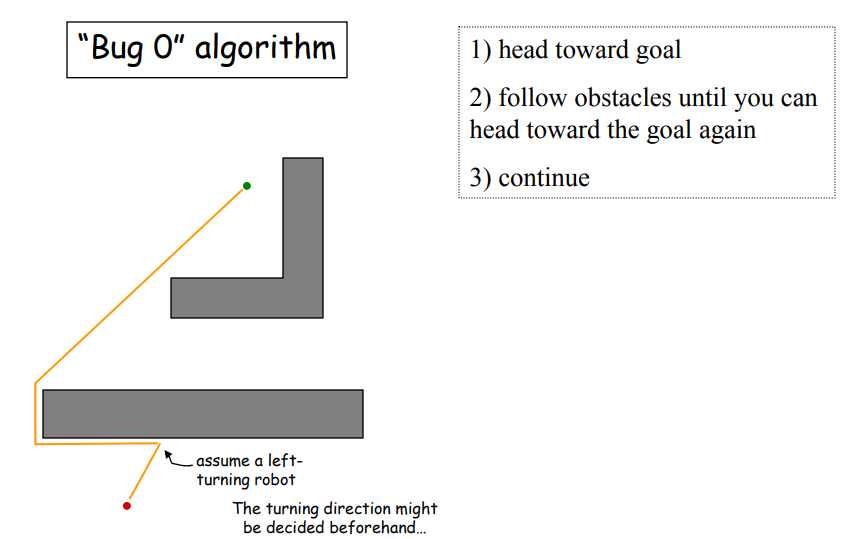
1) head toward goal 2) follow obstacles until you head toward the goal again 3) continue can assume a left- turning robot The turning direction might be decided beforehand... 1) head toward goal 2) follow obstacles until you head toward the goal again 3) continue can assume a left- turning robot The turning direction might be decided beforehand
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts