New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
sciences
modern engineering mathematics
Modern Engineering Mathematics 6th Edition Glyn James - Solutions
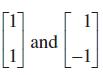
Verify thatare eigenvectors of the matrix
Determine the eigenvalues and eigenvectors for the matrix A of Example 5.41.Data from Example 5.41.Find the characteristic equation for the matrix
Write the Fibonacci series 1, 1, 2, 3, 5, 8, . . . where the next term is the sum of the previous two, in matrix form and compute the general term.
Find the eigenvalues and eigenvectors of
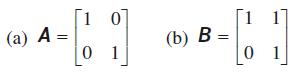
Determine the eigenvalues and corresponding eigenvectors of the matrices
Determine the eigenvalues and corresponding eigenvectors of the matrix
Determine the eigenvalues and corresponding eigenvectors of the matrix
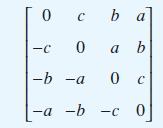
Obtain the eigenvalues and corresponding orthogonal eigenvectors of the symmetric matrixand show that the normalized eigenvectors form an orthonormal set.
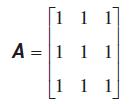
Show that the matrixhas eigenvalues 3, 0, 0 and construct three mutually orthogonal eigenvectors.
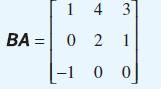
Given(a) Calculate RQ and QTRT;(b) Calculate Q + R, PQ and PR, and hence verify that in this particular case
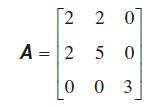
Letwhere λ ≠ μ. Find all pairs of values λ, μ such that B–1AB is a diagonal matrix.
At a point in an elastic continuum the matrix representation of the infinitesimal strain tensor referred to axes Ox1x2x3 isIf i, j and k are unit vectors in the direction of the Ox1x2x3 coordinate axes, determine the normal strain in the direction ofUsing matrix notation, the normal strain is En,
Express the determinantas a product of linear factors.
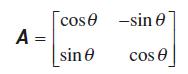
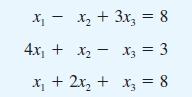
Determine the values of θ for which the system of equationspossesses a solution, and for each such value find all solutions.
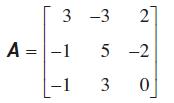
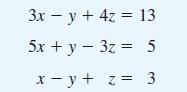
Givenevaluate A2 and A3. Verify thatwhere I is the unit matrix of order 3. Using this result, or otherwise, find the inverse A–1 of A, and hence solve the equations
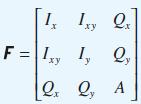
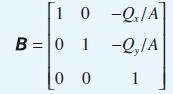
(a) Ifwrite down the transpose matrix PT. Calculate PPT and hence show that PT = P–1. What does this mean about the solution of the matrix equation Px = b?(b) The matrixoccurs in the structural analysis of an arch. Iffind E = BFBT and show that it is a symmetric matrix.
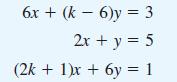
(a) If the matrixshow that A2 = I and derive the elements of a square matrix B which satisfiesA2 = I means that the inverse of A is A itself.(b) Find suitable values for k in order that the following system of linear simultaneous equations is consistent:
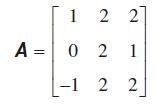
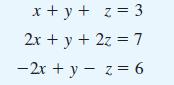
Express the system of linear equationsin the form AX = b, where A is a 3 × 3 matrix and X, b are appropriate column matrices.(a) Find adj A, |A| and A–1 and hence solve the system of equations.(b) Find a matrix Y which satisfies the equation(c) Find a matrix Z which satisfies the equationwhere
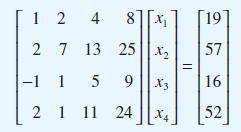
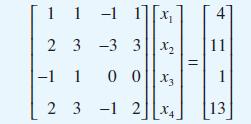
(a) Using the method of Gaussian elimination, find the solution of the equationHence evaluate the determinant of the matrix in the equation.(b) Solve by the method of Gaussian eliminationwith partial pivoting.
Rearrange the equationsso that they are diagonally dominant to ensure convergence of the Gauss–Seidel method. Write a MATLAB program to obtain the solution of these equations using this method, starting from (0, 0, 0). Compare your solution with that from a program when the equations are not
Find the rank of the matrixwhere b ≠ 0 and a2 + c2 + b2.
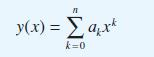
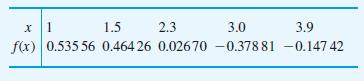
For a given set of discrete data points (xi, fi) (i = 0, 1, 2, . . . , n), show that the coefficients ak (k = 0, 1, . . . , n) fitted to the polynomialare given by the solution of the equations written in matrix form asThe following data is taken from the tables of the Airy function f(x) =
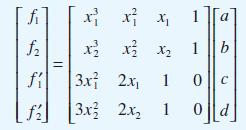
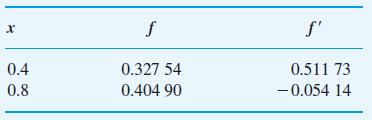
Data is fitted to a cubic f = ax3 + bx2 + cx + d with the slope of the curve given by f' = 3ax2 + 2bx + c If f1 = f(x1), f2 = f(x2), f '1 = f'(x1) and f´2 = f´(x2), show that fitting the data gives the matrix equation for a, b, c and d asUse Gaussian elimination to evaluate a, b, c and d. For
The transformation y = AX whereturns a point with coordinates (x1, x2, x3) into a point with coordinates ( y1, y2, y3). Show that the coordinates of the points that transform into themselves satisfy the matrix equation BX = 0, where B = A – I, with I the identity matrix. Find the rank of B and
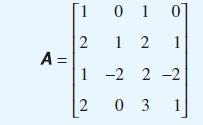
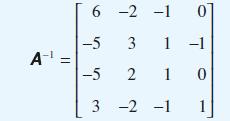
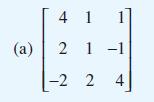
(a) Ifverify that(b) Use the inverse matrix given in (a) to solve the system of linear equations AX = b in which
When a body is deformed in a certain manner, the particle at point X moves to AX, where(a) Where would the pointmove to?(b) Find the point from which the particle would move to the point
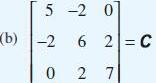
Find the eigenvalues and the normalized eigenvectors of the matricesIn (b) write the normalized eigenvectors as the columns of the matrix U and show that UTCU is a diagonal matrix with the eigenvalues in the diagonal.
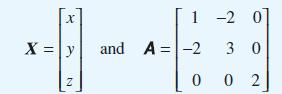
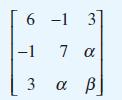
The vector [1 0 1]T is an eigenvector of the symmetric matrixFind the values of α and β and find the corresponding eigenvalue.
Show that the matrixhas eigenvalues 1, 1 and –3. Find the corresponding eigenvectors. Is there a full set of three independent eigenvectors?
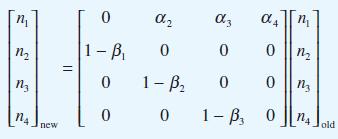
A colony of insects is observed at regular intervals and comprises four age groups containing n1, n2, n3, n4 insects in the groups. At the end of an interval, of the n1 in group 1 some have died and (1 – β1)n1 become the new group 2. Similarly (1 – β2)n2 of group 2 become the new group 3 and
(a) Find the eigenvalues λ1, λ2 and the normalized eigenvectors X1, X2 of the matrixCheck that(b) Use MATLAB to repeat a similar calculation for the three eigenvalues and normalized eigenvectors of
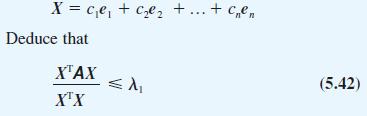
it was stated that a symmetric matrix A has real eigenvalues λ1, λ2, . . . . , λn (written in descending order) and corresponding orthonormal eigenvectors e1, e2, . . . . , en, that is eTiej= δij. In consequence any vector can be written asso that a lower bound of the largest eigenvalue has
A rotation of a set of rectangular cartesian axes Φ(Ox1x2x3) to a set Φ´(Ox´1 x´2 x´3) is described by the matrix L = (lij) (i, j = 1, 2, 3), where lij is the cosine of the angle between Ox´i and Oxj. Show that L is such that LLT = I and that the coordinates of a point in space referred to
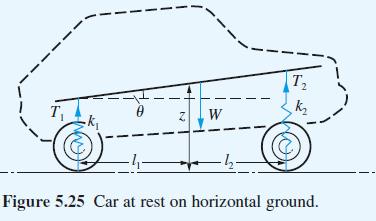
A car is at rest on horizontal ground, as shown in Figure 5.25. The weight W acts through the centre of gravity, and the springs have stiffness constants k1 and k2 and natural lengths a1 and a2. Show that the height z and the angle θ (assumed too small) satisfy the matrix equationObtain reasonable
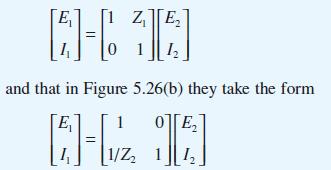
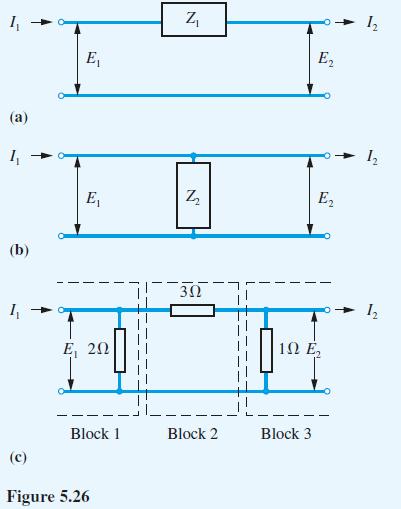
In the circuit in Figure 5.26 (a) show that the equations can be writtenDividing the circuit in Figure 5.26 (c) into blocks, with the output from one block inputting to the next block, analyse the relation between I1, E1 and I2, E2.
1. A kite is flying with the string inclined at an angle of 42° to the horizontal. Find the height of the kite above the ground when the string is 50metres long and attached to a peg in the ground.2. A flagstaff, 21metres high, standing on horizontal ground is held up by ropes. Each rope being
Determine the following using a calculator. Express your answers in both degrees and radians:(a) sin−1 (0.6252)(b) cos−1 (0.4147)(c) tan−1 (1.1667)(d) sin−1 (0.8)(e) cos−1 (0.3)(f) tan−1 (0.6)
1. A vertical cliff is 38 m high and is observed from a boat, which is 52 m from the foot of the cliff. Calculate the angle of elevation of the top of the cliff from the boat.2. John starts at a point O and walks 1.2 km, in the direction N 27° E, to the point A. He then turns to his right through
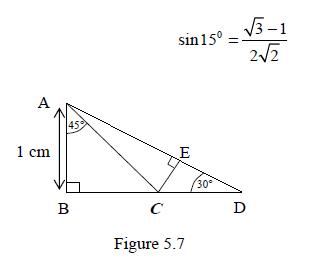
1. Evaluate the following:(a) sin60° cos30° + cos60° sin30°(b)2. In Figure 5.7, calculate CD, CE and ∠ CAD. Then show that:
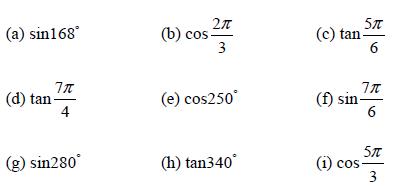
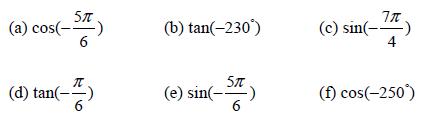
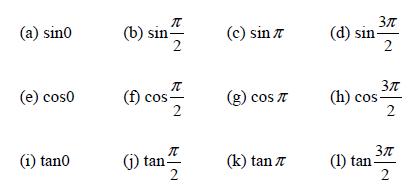
1. Express the following as trigonometric ratios of acute angles:2. Express the following as trigonometric ratios of positive acute angles:3. Write down the values (if defined) of the following:
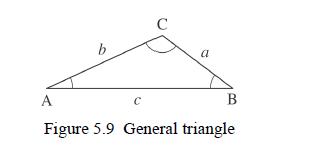
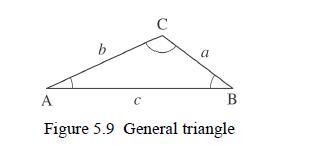
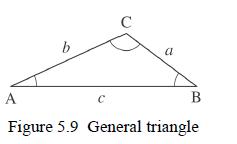
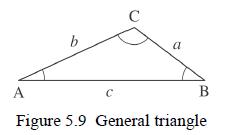
1. If in triangle of Figure 5.9, it is given that A = 40°, B = 60° and c = 6 cm calculate the value of a.2. If in the triangle ABC of Figure 5.9, it is given that a = 93.6 mm, B = 19° and C = 43° determine the angle A and the side lengths b and c.3. If in triangle ABC of Figure 5.9, it is given
1. If in triangle ABC of Figure 5.9, it is given that the side lengths are a = 62 mm, b = 58 m and c = 40 mm determine the three angles.2. If in triangle ABC of Figure 5.9, the angle A° = 58° and two of the sides are b = 5 cm and c = 7 cm find the length a of the third side.3. If in triangle ABC
If tan θ° = 5/12 and 0 < θ ° < 90° determine the values of:(a) sin θ°(b) cos θ°
A telegraph pole 6.3 metres high stands on horizontal ground. It is stayed to the ground by a tie 4.3 metres long and making an angle of 66° with the ground. How far is the point of attachment of the tie from the top of the pole?
A ladder, having its foot on horizontal ground, leans against a vertical wall. The ladder is 4 m long and its top reaches 3 m up the wall. What is the angle between the ladder and the ground.
Solve the triangle ABC of Figure 5.9, given that A = 50°, B = 60° and a = 50.5 mm.
Solve the triangle ABC of Figure 5.9, given that a = 65 mm, c = 38 mm and B = 66°.
Given two non-parallel vectors a and b, indicate on a diagram the vectors a + b, 1/2a + b, b – 1/2a, 3/2 a – b.
An aircraft flies 100 km in a NE direction, then 120 km in an ESE direction and finally S for a further 50 km. Sketch the vectors representing this flight path. What is the distance from start to finish and also the length of the flight path?
(a) Given two non-parallel vectors a and b, show on a diagram that any other vector r can be written as r = αa + βb with constants α and β.(b) Given three non-coplanar, non-parallel vectors a, b and c, show on a diagram that any other vector r can be written as r = αa + βb + γc with
The vector OP(vector) makes an angle of 60° with the positive x axis and 45° with the positive y axis. Find the possible angles that the vector can make with the z axis.
The vectors are given. Find the vector OC(vector) representing the point C on AB that divides AB in the ratio AC:CB = 1:2.
(a) For two vectors show that the midpoint of AB has the vector 1/2(a + b).(b) The midpoints of the sides of the quadrilateral ABCD are PQRS. Show that PQRS forms a parallelogram.
A regular hexagon OACDEB has adjacent sidesFind the vectors OC(vector), OD(vector), OE(vector) representing the other three corners in terms of a and b.
A bird flies N at a speed of 20 m s−1 but the wind is simutaneously carrying it E at 5 m s−1. Find the actual speed of the bird and the angle it deviates from N.
A cyclist travelling east at 8 kilometres per hour finds that the wind appears to blow directly from the north. On doubling her speed it appears to blow from the north-east. Find the actual velocity of the wind.
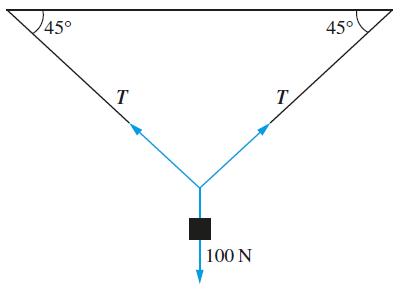
A weight of 100 N is suspended by two wires from a horizontal beam, as in Figure 4.18. Find the tension in the wires.Figure 4.18
Given a = (1, 1, 0), b = (2, 2, 1) and c = (0, 1, 1), evaluate
If the position vectors of the points P and Q are i + 3j – 7k and 5i – 2j + 4k respectively, find PQ(vector) and determine its length and direction cosines.
A particle P is acted upon by forces (measured in newtons) F1 = 3i – 2j + 5k, F2 = –i + 7j – 3k, F3 = 5i – j + 4k and F4 = –2j + 3k. Determine the magnitude and direction of the resultant force acting on P.
If a = 3i – 2j + k, b = –2i + 5j + 4k, c = –4i + j – 2k and d = 2i – j + 4k, determine α, β and γ such that
Prove that the vectors 2i – 4j – k, 3i + 2j – 2k and 5i – 2j – 3k can form the sides of a triangle. Find the lengths of each side of the triangle and show that it is right-angled.
Find the components of the vector a of magnitude 2 units which makes angles 60°, 60° and 135° with axes Ox, Oy, Oz respectively.
The points A, B and C have coordinates (1, 2, 2), (7, 2, 1) and (2, 4, 1) relative to rectangular coordinate axes. Find:(a) The vectors AB(vector) and AC(vector)(b)(c) The unit vector in the direction of AB(vector) – 3AC(vector)(d) The lengths of the vectors AB(vector) and AC(vector)(e) The
In the x–y plane AB(vector) = (1, –2) and B is the point with coordinates (2, 2). Find the coordinates of the point A. The point C has coordinates (3, 2); find D so that AB(vector) = CD(vector).
Given the points P(1, –3, 4), Q(2, 2, 1) and R(3, 7, –2), find the vectors PQ(vector) and QR(vector). Show that P, Q and R lie on a straight line and find the ratio PQ: QR.
Relative to a landing stage, the position vectors in kilometres of two boats A and B at noon are 3i + j and i – 2j respectively. The velocities of A and B, which are constant and in kilometres per hour, are 10i + 24j and 24i + 32j Find the distance between the boats t hours after noon and find
If the complex numbers z1, z2 and z3 are represented on the Argand diagram by the points P1, P2 and P3 respectively andprove that P3 is the foot of the perpendicular from O onto the line P1P2.
ABCD is a square, lettered anticlockwise, on an Argand diagram, with A representing 3 + j2 and B representing –1 + j4. Show that C lies on the real axis and find the complex number represented by D and the length of AB.
A triangle has vertices A, B, C represented by 1 + j, 2 – j and –1 respectively. Find the point that is equidistant from A, B and C.
Given the triangle OAB, where O is the origin, and denoting the midpoints of the opposite sides as O´, A´ and B´, show vectorially that the lines OO´, AA´ and BB´ meet at a point. (Note that this is the result that the medians of a triangle meet at the centroid.)
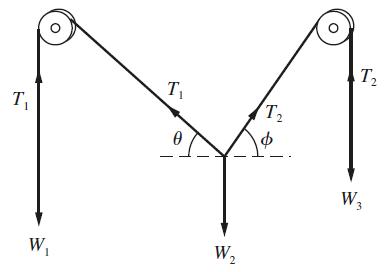
Three weights W1, W2 and W3 hang in equilibrium on the pulley system shown in Figure 4.26. The pulleys are considered to be smooth and the forces add by the rules of vector addition. Calculate θ and Φ, the angles the ropes make with the horizontal.Figure 4.26
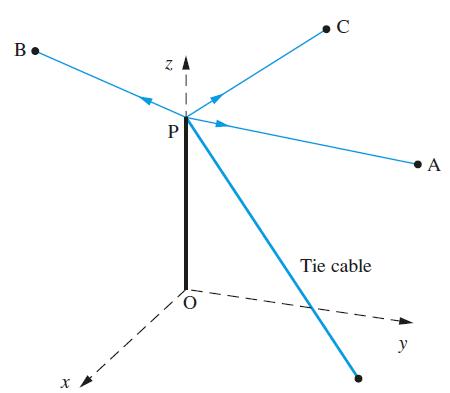
A telegraph pole OP has three wires connected to it at P. The other ends of the wires are connected to houses at A, B and C. Axes are set up as shown in Figure 4.27. The points relative to these axes, with distances in metres, areThe tension in each wire is 900 N. Find the total force acting at P.
Given that u = (4, 0, –2), v = (3, 1, –1), w = (2, 1, 6) and s = (1, 4, 1), evaluate
Given u, v, w and s as for Question 27, find(a) The angle between u and w;(b) The angle between v and s;(c) The value of λ for which the vectors u + λk and v – λi are perpendicular;(d) The value of m for which the vectors w + μi and s – μi are perpendicular.Data from Question 27Given that
Given the vectors u = (1, 0, 0), v = (1, 1, 0), w = (1, 1, 1) and s = (2, 1, 2), find α, β, γ that satisfy s = αu + βv + γw. If u´ = (1, –1, 0), v´ = (0, 1, –1) and w´ = (0, 0, 1) show that
Given |a| = 3, |b| = 2 and a · b = 5 find |a + 2b| and |3a – b|. Find the angle between the vectors a + 2b and 3a – b.
Find the work done by the force F = (–2, –1, 3) in moving a particle from the point P to the point Q having position vectors (–1, 2, 3) and (1, –3, 4) respectively.
Find the resolved part in the direction of the vector (3, 2, 1) of a force of 5 units acting in the direction of the vector (2, –3, 1).
Find the value of t that makes the angle between the two vectors a = (3, 1, 0) and b = (t, 0, 1) equal to 45°.
For any four points A, B, C and D in space, prove that
If (c – 1/2a) · a = (c – 1/2b) · b = 0, prove that the vector c – 1/2 (a + b) is perpendicular to a – b.
Prove that the line joining the points (2, 3, 4) and (1, 2, 3) is perpendicular to the line joining the points (1, 0, 2) and (2, 3, –2).
Show that the diagonals of a rhombus intersect at right angles. If one diagonal is twice the length of the other, show that the diagonals have length 2a/√5 and 4a/√5, where a is the length of the side of the rhombus.
Find the equation of a circular cylinder with the origin on the axis of the cylinder, the unit vector a along the axis and radius R.
A cube has corners with coordinates (0, 0, 0), (1, 0, 0), (0, 1, 0), (1, 1, 0), (0, 0, 1), (1, 0, 1), (0, 1, 1) and (1, 1, 1). Find the vectors representing the diagonals of the cube and hence find the length of the diagonals and the angle between the diagonals.
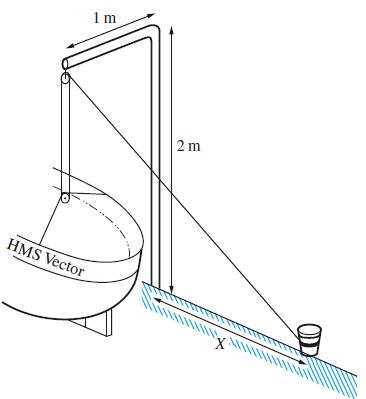
A lifeboat hangs from a davit, as shown in Figure 4.33, with the x direction, the vertical part of the davit and the arm of the davit being mutually perpendicular. The rope is fastened to the deck at a distance X from the davit. It is known that the maximum force in the x direction that the davit
Given p = (1, 1, 1), q = (0, –1, 2) and r = (2, 2, 1), evaluate
The vectors a = (1, –1, 2), b = (0, 1, 3), c = (–2, 2, –4) are given.(a) Evaluate a × b and b × c(b) Write down the vectors b × a and c × b(c) Show that c × a = 0 and explain this result.
Evaluate 2j × (3i – 4k) and (i + 2j) × k.
Given the vectors a = (–3, –1, –2) and b = (2, 3, 1), find |a × b| and (a + 2b) × (2a – b).
Let a = (1, 2, 3), b = (2, 1, 4) and c = (1, –1, 2). Calculate (a × b) × c and a × (b × c) and verify that these two vectors are not equal.
Show that the area of the triangle ABC in Figure 4.43 isShow thatand hence deduce the sine ruleFigure 4.43
Prove that (a – b) × (a + b) = 2(a × b) and interpret geometrically.
The points A, B and C have coordinates (1, –1, 2), (9, 0, 8) and (5, 0, 5) relative to rectangular cartesian axes. Find(a) The vectors AB(vector) and AC(vector);(b) A unit vector perpendicular to the triangle ABC;(c) The area of the triangle ABC.
Use the definitions of the scalar and vector products to show that
If a, b and c are three vectors such that a + b + c = 0, prove thatand interpret geometrically.
A rigid body is rotating with angular velocity 6 rad s–1 about an axis in the direction of the vector (3, –2, 1) and passing through the point A(3, –2, 5). Find the linear velocity of the point P(3, –2, 1) on the body.
A force of 4 units acts through the point P(4, –1, 2) in the direction of the vector (2, –1, 4). Find its moment about the point A(3, –1, 4).
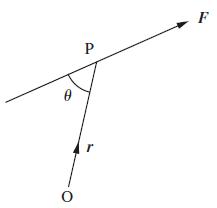
The moment of a force F acting at a point P about a point O is defined to be a vector M perpendicular to the plane containing F and the point O such that |M|= p|F|, where p is the perpendicular distance from O to the line of action of r. Figure 4.44 illustrates such a force F. Show that the
Showing 1300 - 1400
of 2006
First
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Step by Step Answers
![A = -2 1] 1-2](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/6/9/3/777659b901145ec61704693776508.jpg)
![1 A = -1 0 1 -2] 2 1 1 -1](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/6/9/3/739659b8feb35f231704693738339.jpg)
![and [24 P = 0 2 L0 04] [27 7 R = 0 0 0 PAN 0 -67 2 1 [6 2 -1 = 0 2 -2 0 0 4](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/5/167659bbc8f122191704705166898.jpg)
![A [+] and B = [1 [2 ]](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/5/260659bbcec827e01704705260372.jpg)
![E= E = 1 -3 2] 1 -2 4 -3 2-2](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/5/367659bbd579b02c1704705366828.jpg)
![P = 1 3 21 2] -2 2 1 -1 -2 2](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/6/790659bc2e6eb1021704706790695.jpg)
![[100] A = 1 -1 0 1 1-2 -2](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/6/923659bc36b0d4831704706922891.jpg)
![where Aa = f A = xo xo 1xx = : [1 X x a [a, a f = [fo fi ... a,] fil XO](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/7/754659bc6aa530d51704707754076.jpg)
![A = 8-1-4 4 4 7 1 -8 4 Y y = y Y3 [x and X X = X [X3]](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/8/111659bc80f9370c1704708111367.jpg)


![[0 1 0 0] 1010 0 0 1 0 0 1 10](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/9/280659bcca0c677c1704709280609.jpg)
![X' = LX where X' = [x' x x3] and X = [X X X3]. Prove that x + x + x = x + x + x} Describe the relationship](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/0/9/877659bcef5771581704709876425.jpg)
![[-W + ak + ak [-+-2] lika - ka k + k 1kk - -1k + 1 k] Z Hol -1k - 1k0](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1704/7/1/0/491659bd15b3faa51704710491038.jpg)