New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
computer science
signals and systems
Signals and Systems using MATLAB 2nd edition Luis Chaparro - Solutions
Given the realization in Figure 12.32. Obtain(a) the difference equations relating g[n] to x[n]and g[n] to y[n],(b) the transfer function H(z) = Y(z)/X(z) for this filter.Figure 12.32: g[nw[n] 3 v[n] x[n] y[n] 1.3 1.8 0.3 4.5 -0.8 0.4 2.
A three-point moving-average filter is of the form:y[n] = β(αx [n − 1] + x[n] + αx[n + 1])where α and β are constants, and x[n] is the input and y[n] is the output of the filter.(a) Determine the transfer function H(z) = Y(z)/X(z) of the filter and from it find the frequency
Let the filter H(z) be the cascade of a causal filter with transfer function G(z) and an anti-causal filter with transfer function G(zˆ’1), so thatH(z) = G(z) G(zˆ’1)(a) Suppose that G(z)is an FIR filter with transfer functionFind the frequency response H(ejω)
FIR and IIR filters: symmetry of impulse response and linear-phase— Consider two FIR filters with transfer functionsH1(z) = 0.5 + 0.5z−1 + 2.2z−2 + 0.5z−3 + 0.5z−4H2(z) = − 0.5 − 0.5z−1 + 0.5z−3 + 0.5z−4(a) Find the impulse responses h1[n] and h2[n] corresponding to
Consider two filters with transfer functions(a) The magnitude response of these two filters is unity, but that they have different phases. Find analytically the phase of H1(ejω) and use MATLAB to find the unwrapped phase of H2(ejω) and to plot it.(b) Consider the MATLAB
A Butterworth low-pass discrete filter of order N has been designed to satisfy the following specifications:Sampling period Ts =100 µ secαmax = 0.7 dB for 0 ≤ f ≤ fp = 1000 Hzαmin = 10 dB for fst = 1200 ≤ f ≤ fs/2 HzWhat should be the new value of the stopband frequency fst so that an N
Bilinear transformation and pole location—Find the poles of the discrete filter obtained by applying the bilinear transformation with K = 1 to frequency normalized analog second-order Butterworth low-pass filter. Determine the half-power frequency ωhp of the resulting discrete
Warping effect of the bilinear transformation—The non-linear relation between the discrete frequency ω(rad) and the continuous frequency (rad/sec) in the bilinear transformation causes warping in the high frequencies. To see this consider the following:(a) Use MATLAB to design a
The warping effect of the bilinear transformation also affects the phase of the transformed filter. Consider a filter with transfer function G(s) = e−5s.(a) Find the transformed discrete frequencies ω(rad) correspond-ing to 0 ≤ Ω ≤ 20 (rad/sec) using a bilinear transformation with K
Design a Butterworth low-pass discrete filter that satisfies the following specifications:0 ≤ α(ejω) ≤ 3 dB for 0 ≤ f ≤ 25 Hzα(ejω) ≥ 38 dB for 50 ≤ f ≤ Fs/2 Hzand the sampling frequency is Fs = 2000 Hz. Express the transfer function H(z)of the designed filter as a cascade of
Consider an all-pass analog filter(a) Use MATLAB functions to plot the magnitude and phase responses of G(s). Indicate whether the phase is linear.(b) A discrete filter H(z) is obtained from G(s) by the bilinear transformation. By trial and error, find the value of K in the bilinear
We wish to design a discrete Butterworth filter that can be used in filtering a continuous-time signal. The frequency components of interest in this signal are between 0and 1 kHz, so we would like the filter to have a maximum passband attenuation of 3 dB within that band. The undesirable components
Let z = 8 + j3 and v = 9 − j2,(a) Find (i) Re(z) + Im(v), (ii)|z+v|, (iii)|zv|,(iv)
If we wish to preserve low frequencies components of the input, a low-pass Butterworth filter could perform better than a Chebyshev filter. MATLAB provides a second Chebyshev filter function cheby2 that has a flat response in the pass-band and a rippled one in the stopband. Let the signal to be
The gain specifications of a filter are− 0.1 ≤ 20 log10|H(ejω)| ≤ 0(dB) 0 ≤ ω ≤ 0.2 π20 log10|H(ejω)| ≤ − 60(dB) 0.3π≤ω≤π(a) Find the loss specifications for this filter.(b) Design using MATLAB a Butterworth, a Chebyshev (using
Notch filters is a family of filters that includes the all-pass filter. For the filter(a) Determine the values of α1, α2, and K that would make H(z) an all-pass filter of unit magnitude. Use MATLAB to compute and plot the magnitude response of H(z) using the
Consider a filter with transfer function(a) Find the gain K so that this filter has unit dc gain. Use MATLAB to find and plot the magnitude response of H(z), and its poles and zeros. Why is it called a comb filter?(b) Use MATLAB to find the phase response of the filter H(z). Why is it
Consider down-sampling the impulse response h[n] of a filter with transfer function H(z) = 1/(1 − 0.5z−1).(a) Use MATLAB to plot h[n] and the down-sampled impulse response g[n] = h[2n].(b) Plot the magnitude responses corresponding to h[n] and g[n] and comment on the effect of the
Consider a moving average, low-pass, FIR filter(a) Use the modulation property to convert the given filter into a high-pass filter.(b) Use MATLAB to plot the magnitude responses of the low-pass and the high-pass filters. -2 1+z +z Н(2). 3
Use MATLAB to design a Butterworth second-order low-pass discrete filter H(Z) with half-power frequency θhp = π/2, and dc gain of 1. Consider this low-pass filter a prototype that can be used to obtain other filters. Implement using MATLAB the frequency transformations Z−1 = N(z)/D(z) using the
Use MATLAB to design a Butterworth second-order low-pass discrete filter with half-power frequency θhp = π/2, and dc gain of 1, call it H(z). Use this filter as prototype to obtain a filter composed of a parallel combination of the following filters.(a) Assume that we up-sample by L = 2
From the direct and the inverse DTFT of x[n] = 0.5|n|:(a) Determine the sum
Consider the connection between the DTFT and the Z-transform in the following problems.(a) Let x[n] = u[n + 2] ˆ’ u[n ˆ’ 3].i. Can you find the DTFT X(ejω) of x[n] using the Z-transform? If so, what is it?ii. Is it true that X(ej0) = 5? Explain.(b) For
A triangular pulse is given byFind a sinusoidal expression for the DTFT of t[n]
The frequency response of an ideal low-pass filter is
Find the DTFT of x[n] = ejθδ[n + Ï„] + eˆ’jθδ[n ˆ’ Ï„], and use it to find the DTFT of cos(ω0n + θ),ˆ’ ˆž < n < ˆž according to the duality
Consider the application of the DTFT properties to filters.(a) Let h[n]be the impulse response of an ideal low-pass filter with frequency response
Find the DTFT X(ejω) of x[n] = δ[n] − δ[n − 2].(a) Sketch and label carefully the magnitude spectrum |X(ejω)| for 0 ≤ ω < 2π.(b) Sketch and label carefully the magnitude spectrum |X(ejω)| for – π ≤ ω < π.(c) Sketch and label carefully the phase spectrum
Let x[n] = u[n + 2] ˆ’ u[n ˆ’ 3](a) Find the DTFT X(ejω) of x[n] and sketch |X(ejω)| vs ω giving its value at ω = ± Ï€, ± Ï€/2, 0.(b) If x1[n] = x[2n], i.e., x[n] is down-sampled with M = 2,
Consider a LTI discrete-time system with input x[n] and output y[n]. It is known that the impulse response of the system is(a) Determine the magnitude and phase responses |H(ejω)|and ˆ H(ejω)(b) Find the output y[n] if x[n] = δ[n ˆ’
Consider the following problems related to the properties of the DTFT.(a) For the signal x[n] = βn u[n], β > 0, for what values of β you are able to find the DTFT of x[n] ,X(ejω), from X(z)?(b) Given the DTFT X(ejω) =
The impulse response of an FIR filter is h[n] = (1/3) (δ[n] + δ[n − 1] +δ[n − 2]).(a) Find the frequency response H(ejω), and determine the magnitude and the phase responses for − π < ω ≤ π.(b) Find poles and zeros of the transfer function H(z) of this filter and
The transfer function of an FIR filter is H(z) = z −2(0.5z + 1.2 + 0.5z−1).(a) Find the frequency response H(ejω) of this filter. Is the phase response of this filter linear?(b) Find the impulse response h[n] of this filter. Is h[n] symmetric with respect to some n? How does this
Determine the Fourier series coefficients Xi[k], i = 1,..., 4, for each of the following periodic discrete-time signals. Explain the connec-tion between these coefficients and the symmetry of the corresponding signals.(a) x1[n] has a fundamental period N = 5 and in a period x1[n] =
Determine the Fourier series coefficients of the following periodic discrete-time signals(a) x1 [n] = 1 − cos(2πn/3), x2[n] = 2 + cos(8πn/3), x3[n] = 3 − cos(2πn/3) + cos(8πn/3), x4 [n] = 2 + cos(8πn/3) + cos(2πn/3), x5 [n] = cos(πn/3) + ( − 1)n.(b)(i) y[n] has a fundamental
A periodic discrete-time signal x[n] with a fundamental period N = 3 is passed through a filter with impulse response h[n] = (1/3) (u[n] − u[n − 3]). Let y[n] be the filter output. We begin the filtering at n = 0, i.e., we are interested in y[n], n ≥ 0 and could assume y[n] = 0, n
For the periodic discrete-time signal x[n] with a period x1[n] = n, 0 ≤ n ≤ 3 use its circular representation to findx[n − 2], x[n + 2], x[ − n], x[ − n + k], for 0 ≤ k ≤ 3display several periods.
Let x[n] = 1+ejω0n and y[n] = 1 + ej2ω0 n be periodic signals of fundamental period ω0 = 2π/N, find the Fourier series of their product z[n] = x[n] y[n] by(a) calculating the product x[n] y[n],(b) using the periodic convolution of length N = 3 of the Fourier series coefficients of x[n] and
The periodic signal x[n] has a fundamental period N0 = 4, and a period is given by x1[n] = u[n] − u[n − 2]. Calculate the periodic convolution of length N0 = 4 of(a) x[n] with itself and call it v[n],(b) x[n] and x[−n]and call it z[n].
Consider the aperiodic signalFind the DFT of length L = 4 of(i) x[n], (ii) x1[n] = x[n ˆ’ 3], (iii) x2[n] = x[ ˆ’ n], (iv) x3 [n] = x[n + 3] 1
Consider the discrete-time signal x[n] = u[n] − u[n − M] where M is a positive integer.(a) Let M = 1, calculate and sample the DTFT X(ejω) in the frequency domain using a sampling frequency 2π/N with N = M to obtain the DFT of length N = 1.(b) Let N = 10, still M = 1, sample the
The convolution sum of a finite sequence x[n] with the impulse response h[n] of an FIR system can be written in a matrix form y = Hx where H is a matrix, x and y are input and output values. Let h[n] = (1/3) (δ[n] + δ[n − 1] + δ[n − 2]) and x[n] = 2δ[n] + δ[n − 1].(a) Write the
The signal x[n] = 0.5n (u[n] − u[n − 3]) is the input of a LTI system with an impulse response h[n] = (1/3) (δ[n] + δ[n − 1] + δ[n − 2]).(a) Determine the length of the output y[n]of the system.(b) Calculate the output y[n]using the convolution sum.(c) Use the
The input of a discrete-time system is x[n] = u[n] − u[n − 4] and the impulse of the system is h[n] = δ[n] + δ[n − 1] + δ[n − 2](a) Calculate the DFTs of h[n], x[n] of length N = 7. Call them H(k) and X(k). Calculate X(k) H(k) = Ŷ(k)(b) If y(n) = (x∗h) [n], would you
Given the impulse responsewhere α > 0. Find values of αfor which the filter has zero phase. Verifiy your results with MATLAB. -2
An IIR filter is characterized by the following difference equation y[n] = 0.5y[n − 1] + x[n] − 2x[n − 1], n ≥ 0, where x[n] is the input and y[n] the output of the filter. Let H(z) be the transfer function of the filter.(a) The given filter is LTI, as such the
Consider a moving average FIR filter with an impulse responseLet H(z) be the Z-transform of h[n].(a) Find the frequency response H(ejω) of the FIR filter.(b) Let the impulse response of a new filter be given by h1[n] = ( ˆ’ 1)n h[n], use again the eigenfunction
When designing discrete filters the specifications can be given in the time domain. One can think of converting the frequency domain specifications into the time domain. Assume you wish to obtain a filter that approximates an ideal low-pass filter with a cut-off frequency
Consider the pulses x1[n] = u[n] − u[n − 20] and x2[n] = u[n] − u[n − 10], and their product x[n] = x1[n] x2[n].(a) Plot the three pulses. Could you say that x[n] is a down-sampled version of x1[n]? what would be the down-sampling rate? Find X1(ejω).(b) Find directly the
Suppose you cascade an interpolator (an upsampler and a low-pass filter) and a decimator (a low-pass filter and a downsampler).(a) If both the interpolator and the decimator have the same rate M, carefully draw a block diagram of the interpolator-decimator system.(b) Suppose
Let X(ejω) = 2e−j4ω, − π ≤ ω < π.(a) Use the MATLAB functions freqzand angle to compute the phase of X(ejω) and then plot it. Does the phase computed by MATLAB appear linear? What are the maximum and minimum values of the phase, how many radians separate the minimum
A window w[n] is used to consider the part of a signal we are interested in.(a) Let w[n] = u[n] − u[n − 20] be a rectangular window of length 20. Let x[n] = sin(0.1πn) and we are interested in a period of the infinite length signal x[n], or y[n] = x[n] w[n]. Compute the DTFT of
The Fourier series of a signal x[n] and its coefficients Xkare both periodic of the same value Nand as such can be written(a) To find the x[n], 0 ‰¤ n ‰¤ N ˆ’ 1, given Xk, 0 ‰¤ k ‰¤ N ˆ’ 1, write a set of N linear
A periodic signal x[n] of fundamental period N can be represented by its Fourier seriesIf you consider this a representation of x[n](a) Is x1 [n] = x[n ˆ’ N0] for any value of N0 periodic? If so use the Fourier series of x[n] to obtain the Fourier series coefficients of
Let x[n] be an even signal, and y[n] an odd signal.(a) Determine whether the Fourier coefficients Xk and Yk corresponding to x[n] and y[n] are complex, real, or imaginary.(b) Consider x[n] = cos(2πn/N) and y[n] = sin(2πn/N) for N = 3 and N = 4, use the above results to find the
Suppose you get noisy measurementsy[n] = ( − 1)n x [n] + Aη[n]where x[n] is the desired signal, and η[n] is a noise that varies from 0 to 1 at random.(a) Let A = 0, and x[n] = sign[cos(0.7πn)]. Determine how to recover it from y[n]. Specify the type of filter you might need.
Consider a signal x[n] = 0.5n(0.8)n (u[n] − u[n − 40])(a) To compute the DFT of x[n] we pad it with zeros so as to obtain a signal with length 2γ, larger than the length of x[n] but the closest to it. Determine the value of γ and use the MATLAB function fft to compute the DFT X[k]
When we pad an aperiodic signal with zeros, we are improving its frequency resolution, i.e., the more zeros we attach to the original signal the better the frequency resolution, as we obtain the frequency representation at a larger number of frequencies around the unit
A definite advantage of the FFT is that it reduces considerably the computation in the convolution sum. Thus if x[n], 0 ‰¤ n ‰¤ N ˆ’ 1, is the input of an FIR filter with impulse response h[n], 0 ‰¤ n ‰¤ M ˆ’ 1,
Consider the circular convolution of two signals x[n] = n, 0 ≤ n ≤ 3 and y[n] = 1, n = 0, 1, 2 and zero for n = 3.(a) Compute the convolution sum or linear convolution of x[n] and y[n]. Do it graphically and verify your results by multiplying the DFTs of x[n] and y[n].(b) Use MATLAB
Consider a filter with a transfer function(a) Determine the magnitude of this filter at Ω = 0, 1, and ˆž. What type of filter is it?(b) Show that the bandwidth of this filter is BW = Ω2 €“ Ω1 = 1/Q where the half-power
A series RC circuit is connected to a voltage source vi(t), and the output is the voltage across the capacitor, vo(t).(a) Find the transfer function H(s) = Vo(s)/Vi(s) of this filter when the resistor is R=10 kΩ, and the capacitor C = 1μF.(b) To normalize this circuit we let Rn =
Consider a second-order analog filter with transfer function(a) Determine the dc gain of this filter. Plot the poles and zeros; determine the magnitude response |H(jΩ)|of this filter and carefully plot it.(b) Find the frequency Ωmax at which the magnitude
Consider a first-order system with transfer functionwhere K > 0 is a gain, z1 is a zero, and p1 is a pole.(a) If we want unity dc gain, i.e., |H(j0)| = 1, what should be the value of K.(b) What types of filters (lowpass, bandpass, band-eliminating, all-pass, and high-pass) can you
A second-order analog low-pass filter has a transfer functionwhere Q is called the quality factor of the filter.(a) Show that the maximum of the magnitude€¢ for Q < 1/ˆš2occurs at Ω = 0.€¢ for Q ‰¥ 1/ˆš2occurs at a frequency
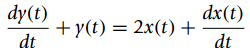
A passive RLC filter is represented by the ordinary differential equationwhere x(t) is the input and y(t) is the output.(a) Find the transfer function H(s) of the filter and indicate what type of filter it is.(b) For an input x(t) = 2u(t), find the corresponding output y(t) and determine
The receiver of an AM system consists of a band-pass filter, a demodula-tor, and a low-pass filter. The received signal isr(t) = m(t)cos(40000π t) + q(t)where m(t) is a desired voice signal with bandwidth BW = 5 KHz that modulates the carrier cos(40000π t) and q(t) is the rest of the signals
Consider the RLC circuit in Figure 7.15 where R = 1Ω.(a) Determine the values of the inductor and the capacitor so that the transfer function of the circuit when the output is the voltage across the capacitor, v0(t), is(b) Find the transfer function of the circuit, with
The loss at a frequency Ω = 2000(rad/sec) is α(2000) = 19.4 dBs for a fifth-order lowpass Butter worth filter with unity dc gain. If we let α(Ωp) = αmax = 0.35 dBs, determine• The half-power frequency Ωhp, and• The passband frequency Ωp of the filter.
The specifica-tions for a low-pass filter areΩp = 1500 rad/sec, αmax = 0.5 dBsΩs = 3500 rad/sec, αmin = 30 dBs(a) Determine the minimum order of the low-pass Butteworth filter and compare it to the minimum
Consider the following low-pass filter specificationsαmax = 0.1 dB αmin = 60 dBΩp = 1000 rad/sec Ωs = 2000 rad/sec(a) Use MATLAB to design a Chebyshev low-pass filter that satisfies the above specifications. Plot the poles and zeros and the magnitude and phase of the designed filter.
A desirable signal x(t) = cos(100πt) – 2 cos(50π t) is recorded as y(t) = x(t) + cos(120πr t), i.e., as the desired signal but with a 60 Hz hum. We would like to get rid of the hum and recover the desired signal. Use symbolic ATLAB to plot x(t) and y(t). Consider the following three different
Consider the sampling of real signals.(a) Typically, a speech signal that can be understood over a telephone line shows frequencies from about 100 Hz to about 5 kHz. What would be the sampling frequency fs (samples/sec) that would be used to sam-ple speech without aliasing? How many samples
Consider the sampling of a sinc signal and related signals.(a) For the signal x(t)=sin(t)/t, find its magnitude spectrum |X(Ω)|and determine if this signal is band-limited or not.(b) What would be the sampling period Tsyou would use for sampling x(t) without aliasing?(c) For a signal y(t) = x2(t)
Consider the signal x(t)=2 sin(0.5t)/t(a) Is x(t) band-limited? If so, indicate its maximum frequency Ωmax.(b) Suppose that Ts = 2 π, how does Ωs relate to the Nyquist frequency 2Ωmax? Explain. What is the sampled signal x(nTs) equal to?(c) Determine the spectrum of the sampled signal
Consider the signal x(t) = δ(t + 1) + δ(t − 1).(a) Find its Fourier transform X(Ω). Determine if x(t) is band-limited or not. If band-limited, give its maximum frequency.(b) Filtering x(t) with a filter of magnitude H(jΩ) = u(Ω + 1) − u(Ω − 1) and zero phase the output is
The signal x(t) has a Fourier transform X(Ω) = u(Ω + 1) − u(Ω − 1) thus it is band-limited, suppose we generate a new signal y(t) = (x* x)(t), i.e., it is the convolution of x(t) with itself.(a) Find x(t) and indicate its support.(b) Is it true that y(t) = x(t)? to determine if
Suppose you wish to sample an amplitude modulated signal x(t) = m(t) cos(Ωct) where m(t) is the message signal and Ωc = 2π104(rad/sec) is the carrier frequency.(a) If the message is an acoustic signal with frequencies in a band of [0, 22] kHz, what would be maximum frequency present in x(t)?(b)
The input/output relation of a non-linear system is y(t) = x2(t), where x(t) is the input and y(t) is the output.(a) The signal x(t) is band-limited with a maximum frequency ΩM = 2000π(rad/sec), determine if y(t) is also band-limited and if so what is its maximum frequency max.(b) Suppose that
A message m(t) with a bandwidth of B = 2 kHz modulates a cosine carrier of frequency 10 kHz to obtain a modulated signal s(t) = m(t)cos(20 × 103πt).(a) What is the maximum frequency of s(t)? What would be the values of the sampling frequency fs in Hz, according to the Nyquist sampling condition,
You wish to recover the original analog signal x(t) from its sampled form x(nTs).(a) If the sampling period is chosen to be Ts = 1 so that the Nyquist sampling rate condition is satisfied, determine the magnitude and cut-off frequency of an ideal low-pass filter H(jΩ) to recover the original
A periodic signal has the following Fourier series representation(a) Is x(t) band-limited?(b) Calculate the power Px of x(t).(c) If we approximate x(t) asby using 2N + 1 terms, find N so that x̂(t)has 90% of Px.(d) If we use N found above, determine the sampling period that can be used
Suppose x(t) has a Fourier transform X(Ω) = u(Ω + 1) − u(Ω − 1)(a) Determine possible values of the sampling frequency Ωs so that x(t) is sampled without aliasing.(b) Let y(t) = x2(t), find the Fourier transform Y(Ω), indicating its maximum frequency. Is y(t)
Consider the periodic signalsx1(t) = cos(2π t), x2(t) = cos((2π + φ)t)(a) Let φ = 4π, show that if we sample these signals using Ts = 0.5 we get the same sample values from the two signals. Is any of these signals aliased?
A signal x(t) is sampled with no aliasing using an ideal sampler. The spectrum of the sampled signal is shown in Figure 8.17.(a) Determine the sampling period Ts used.(b) Determine the signal x(t).(c) Sketch and label the magnitude response of an ideal low-pass filter that can be
Consider the signals x(t) = u(t) − u(t − 1), and y(t) = r(t) − 2r(t − 1) + r(t − 2)(a) Is any of these signals band-limited? Explain.(b) Use Parseval’s energy result to determine maximum frequency for the signals keeping 90% of the energy of the signals. Use function fourier
Signals of finite time support have infinite support in the frequency domain, and a band-limited signal has infinite time support. A signal cannot have finite support in both domains.(a) Consider the signals x(t) = eˆ’t2(the Gaussian function) and x1(t) = u(t + 1) ˆ’ u(t
Suppose you want to find a reasonable sampling period Ts for the non-causal exponential x(t)= e−|t|.(a) Find the Fourier transform of x(t), and plot |X(Ω)|. Is x(t) band-limited? Use the symbolic function fourier to find the Fourier transform.(b) Find a frequency Ω0 so that 99% of
Let ‰¤ t ‰¤ 1 ‰¤ t ‰¤ 1, and zero otherwise, be the input to a 2 bit analog-to-digital converter.(a) For a sampling period Ts = 0.025 sec. determine and plot using MATLAB the sampled signal(b) The 4-level quantizer (see Figure 1.2)
For the discrete-time signalsketch and label carefully the following signals:(a) x[n ˆ’ 1], x[ˆ’n], and x[2 ˆ’ n].(b) The even component xe[n] of x[n].(c) The odd component xo[n] of x[n]. n = -1,0, 1 x[n] = {0.5 n = 2 otherwise
For the discrete-time periodic signal x[n] = cos (0.7πn),(a) Determine its fundamental period N0.(b) Suppose we sample the continuous-time signal x(t) = cos (πt) with a sampling period Ts = 0.7. Is the Nyquist sampling conditions satisfied? How does the sampled signal compare to
Consider the following problems related to the periodicity of discrete-time signals.(a) Determine whether the following discrete-time sinusoids are periodic or not. If periodic, determine its fundamental period N0.(i) x[n]=2 cos(πn − π/2),
The following problems relate to periodicity and power of discrete-time signals.(a) Is the signal x[n] = ej(n−8)/8 periodic? if so determine its fundamental period N0. What if x1[n] = ej((n−8)π/8) (notice the difference with x[n]) would this new signal be periodic? if so what would the
The following problems relate to linearity, time-invariance, causality, and stability of discrete-time systems.(a) The output y[n] of a system is related to its input x[n] by y[n] = x[n]x[n ˆ’ 1]. Is this systemi. linear? time-invariant?ii. causal? bounded-input bounded-output
Consider a discrete-time system with output y[n] given by y[n] = x[n] f[n] and x[n] is the input and f[n] is a function.(a) Let the input be x[n] = 4cos (πn/2) and f[n] = cos (6πn/7), −∞ < n < ∞. Is x[n] periodic? If so, indicate its fundamental period N0. Is the output of the
Consider a system represented bywhere the input is x[n] and the output y[n]. Is the system(a) linear? time-invariant?(b) causal? bounded-input bounded-output stable? n+4 γin] Σt x[k] k=n-2
You are testing a 1 volt. d.c. source and have the following measurements obtained from the source every minute starting at time 0To find the average voltages for the first 5 min, i.e., to get rid of some of the noise in the data, you use the following averager(a) Use the input/output equation
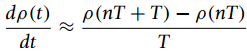
A continuous-time system is characterized by the ordinary differential equationThis equation is discretized by approximating the derivatives for a signal Ï(t) asaround t = nT, and for a small value of T. Obtain a block diagram that represents the obtained difference equation from the
A causal, LTI discrete-time system is represented by the block diagram shown in Figure 9.15 where D stands for a one-sample delay.(a) Find the difference equation relating the input x[n] and the output y[n].(b) Find the impulse response h[n] of the system and use it to deter-mine if the
The input and the output of an LTI causal discrete-time system areInput: x[n] = u[n] − u[n − 3], Output : y[n] = u[n − 1] − u[n − 4](a) What should be the length of the impulse response h[n] of the system?(b) Find the impulse response of the system, h[n],
Showing 200 - 300
of 522
1
2
3
4
5
6
Step by Step Answers
![g[nw[n] 3 v[n] x[n] y[n] 1.3 1.8 0.3 4.5 -0.8 0.4 2.](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/9/2/2/6335c24e8490acc91545905216057.jpg)


![п -Ө) u[n], х-\n] — u[—п — 1] х[n] 3](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/1/6125c2384bcd136e1545814197590.jpg)
![3+n -2 <n< -1 t[n] = {3 – n 0<n<2 otherwise](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/1/8535c2385ad655cc1545814438071.jpg)
![1 -1/2 < w <1/2 0 otherwise in (–x,7] H(](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/1/9565c23861449cb51545814541070.jpg)
![x1[n] = 1+ style=](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/2/1095c2386ad7c10f1545814694238.jpg)
![1 -0.47 < w < 0.4M 0 otherwise in (–x,7] H(e](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/2/4395c2387f7511971545815023855.jpg)

![x[n/2] n even x2[n] = otherwise](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/2/8405c238988012291545815424676.jpg)
![sin(л(n — 10)/3) п (п — 10) -,п # 10, h[10] — 1/3. h[n]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/3/2/9385c2389eaf02a11545815523712.jpg)

![1 п%3D 0, 1, 2 x[n] = 0o therwise](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/8/4/5/5815c23bb4dee81a1545828165839.jpg)
![-2 <n< 2 h[n] otherwise](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/9/0/2/1535c249849b0c921545884736758.jpg)

![N-1 0 <n< N – 1 (1) x[n] = Xe2a nk/N k=0 N-1 style=](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/9/0/5/2815c24a481457641545887864699.jpg)
![N-1 | in]-Σχ,ελπn:/N Хь 0 <n< N – 1 k=0](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/9/0/5/6025c24a5c2698f81545888185569.jpg)

![n = -1,0, 1 x[n] = {0.5 n = 2 otherwise](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/4/9/3/2455c1e5afd832561545475821399.jpg)
![x[n] y[n] (X) cos(n/ 4)](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/4/9/3/7925c1e5d20dacc21545476368829.jpg)
![n+4 γin] Σt x[k] k=n-2](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/4/9/4/1565c1e5e8cc8d7d1545476732768.jpg)
![п x[n] п x[п] 0 1.0 3 0.7 1 1.2 4 1.2 2 0.9 5 1.0](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/4/9/4/4145c1e5f8e676a11545476990232.jpg)
![y[n] = x[n] + x[n – 1] +x[n – 2]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1545/4/9/4/4145c1e5f8e78da31545476990326.jpg)
![2 e[n] yla) D. D Ma-1]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1606/4/6/9/5455fc0c7a9848e71606469545412.jpg)

