

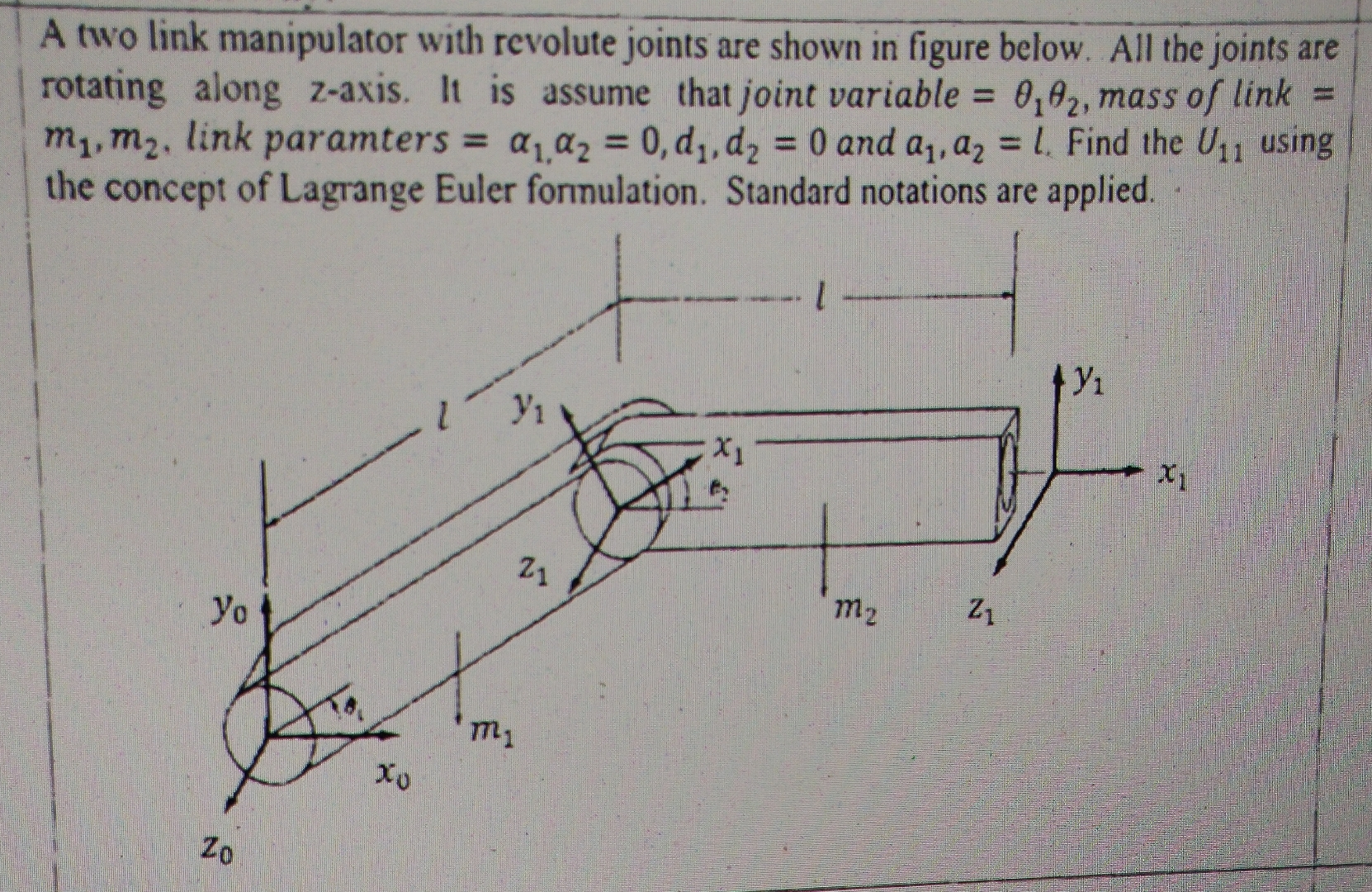
Question: A two link manipulator with revolute joints are shown in figure below. All the joints are rotating along z - axis. It is assume that
A two link manipulator with revolute joints are shown in figure below. All the joints are rotating along axis. It is assume that joint variable mass of link link paramters and Find the using the concept of Lagrange Euler formulation. Standard notations are applied.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock