

Question: Repeat Problem 8.4-3 for a proportional-plus-integral (PI) compensator. Note that in this case, the steady-state error for a constant input is zero. Problem 8.4-3 Shown
Repeat Problem 8.4-3 for a proportional-plus-integral (PI) compensator. Note that in this case, the steady-state error for a constant input is zero.
Problem 8.4-3
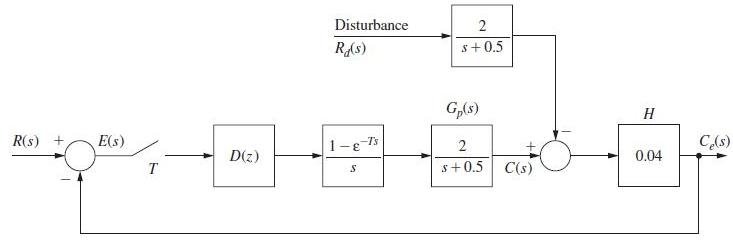
Shown in Fig. P8.4-3 is the block diagram of the temperature control system described in Problem 1.6-1. For this problem, ignore the disturbance input. In Fig. P8.4-3 the sensor gain of H = 0.04 has been shifted into the forward path to yield a unity feedback system. The stability characteristics are unchanged, since the loop transfer function has not changed. Note that c(t) is the chamber temperature in degrees Celsius. It is shown in Problem 6.2-4 that with T = 0.6, the function G(z)H is given by
Step by Step Solution
3.34 Rating (154 Votes )
There are 3 Steps involved in it
Sensor gain H 004 has been shifted into the forward path to yield a unity feedback system Loop trans... View full answer

Get step-by-step solutions from verified subject matter experts