New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
modern control systems
Modern Control Systems 14th Edition Richard C. Dorf - Solutions
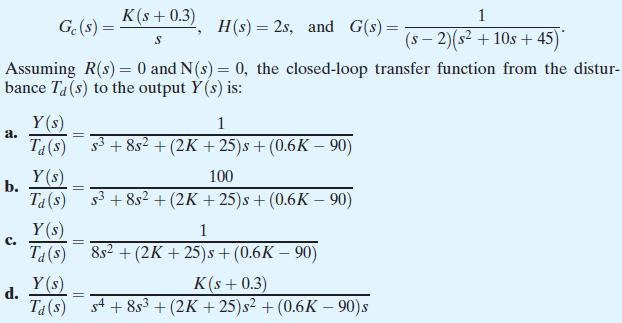
Consider the feedback system in Figure 2.74 with Ge(s): K(s +0.3) = H(s) 2s, and G(s) = S 1 (s2)(s + 10s+45) Assuming R(s) = 0 and N(s) = 0, the closed-loop transfer function from the distur- bance Ta(s) to the output Y(s) is: Y(s) a. 1 Ta(s) $3+852 + (2K+25)s+ (0.6K - 90) Y(s) b. 100 Ta(s) s3+852
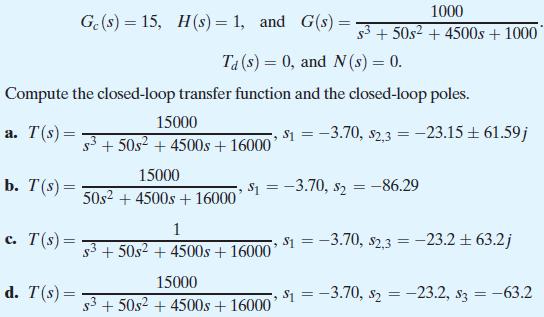
Consider the closed-loop system in Figure 2.74 with Ge(s) = 15, H(s) = 1, and G(s) = 1000 $3+50s+4500s+ 1000' Ta(s) = 0, and N(s) = 0. Compute the closed-loop transfer function and the closed-loop poles. 15000 a. T(s)= $1 = -3.70, $2,3 = -23.15 61.59j s + 50s + 4500s +16000 15000 b.
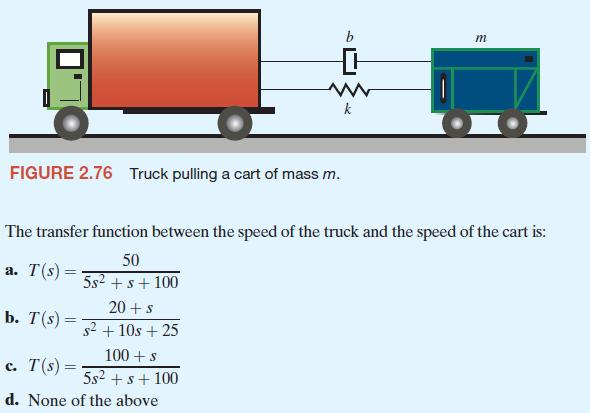
A cart of mass m = 1000 kg is attached to a truck using a spring of stiffness k = 20,000 N/m and a damper of constant b = 200 Ns/m, as shown in Figure 2.76.The truck moves at a constant acceleration of a = 0.7 m/s2. b [ m II FIGURE 2.76 Truck pulling a cart of mass m. The transfer function between
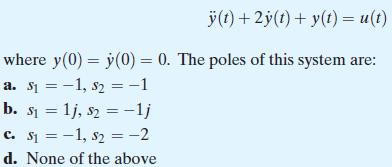
Consider the differential equation y(t)+2y(t) + y(t) = u(t) where y(0) = y(0) = 0. The poles of this system are: a. s =-1, $2 = -1 == b. s =1j, s2 == -1j c. s =-1, $2 = -2 d. None of the above
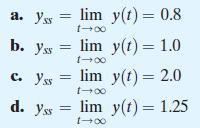
The final value of the unit step response y(t) is: a. yslim y(t) = 0.8 1700 b. yss = lim y(t) = 1.0 100 c. Yss = lim y(t) = 2.0 d. Yss 100 = lim y(t) = 1.25 881
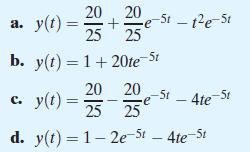
The closed-loop unit step response is: a. y(t)= 20 22 25 20 + -St - 12e-51 25 b. y(t)=1+20te -51 20 20 -51-4te -St - 4te-St c. y(t) = 525 d. y(t) 1-2e-St - 4te-St
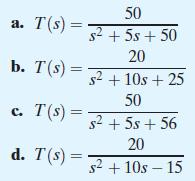
The closed-loop transfer function T(s) = Y(s)/R(s) is: a. T(s): = b. T(s)= c. T(s) = d. T(s)= = 50 $ + 5s +50 20 s + 10s+25 50 s + 5s +56 20 s + 10s-15
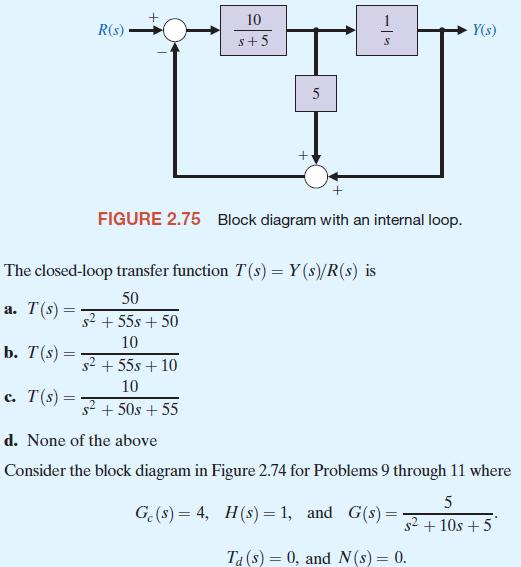
Consider a system represented by the block diagram in Figure 2.75. 10 R(s) s+5 5 + -15 Y(s) FIGURE 2.75 Block diagram with an internal loop. The closed-loop transfer function T(s) = Y(s)/R(s) is 50 a. T(s)= s + 55s +50 10 b. T(s)= s+55s+10 10 c. T(s) = + 50s +55 d. None of the above Consider the
Consider the system in Figure 2.74 with s+4 Ge(s)=20, H(s) = 1, and G(s) = == $-12s-65 When all initial conditions are zero, the input R(s) is an impulse, the disturbance T(s) = 0, and the noise N(s) = 0, the output y(t) is a. y(t) 10e St +10e-3t b. y(t) et +10e c. y(t)=10e -10e-5t d. y(t)=20e-8
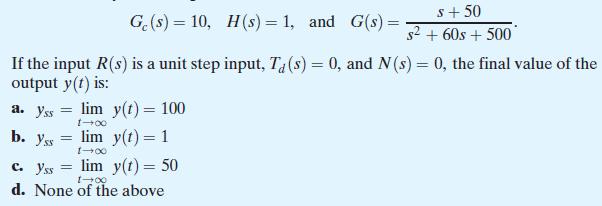
6. Consider the system in Figure 2.74 where Ge(s) 10, H(s) = 1, and G(s) = s+50 s + 60s + 500 If the input R(s) is a unit step input, Td(s) = 0, and N(s) = 0, the final value of the output y(t) is: a. Yss b. Yss 1-00 = lim y(t) = 100 lim y(t) = 1 = 1-00 c. ysslim y(t) = 50 1900 d. None of the above
5. The transfer function is the ratio of the Laplace transform of the output variable to the Laplace transform of the input variable, with all initial conditions equal to zero. True or False
4. A linear system satisfies the properties of superposition and homogeneity. True or False
3. The roots of the characteristic equation are the zeros of the closed-loop system. True or False
2. The s-plane plot of the poles and zeros graphically portrays the character of the natural response of a system. True or False
1. Very few physical systems are linear within some range of the variables. True or False
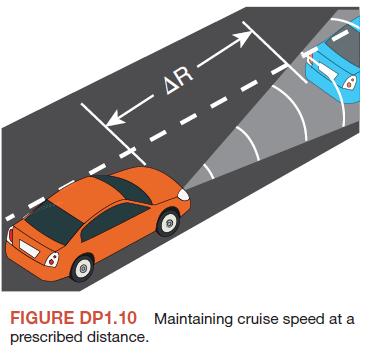
In addition to maintaining automobile speed, many vehicles can also maintain a prescribed distance to an automobile in front, as illustrated in Figure DP1.10. Design a feedback control sysytem that can maintain cruise speed at a prescribed distance to the vehicle in front. What happens if the
Consider the human transportation vehicle(HTV) depicted in Figure DP1.9. The self-balancing HTV is actively controlled to allow safe and easy transportation of a single person [97]. Describe a closed-loop feedback control system to assist the rider of the HTV in balancing and maneuvering the
A challenging application of control design is the use of nanorobots in medicine. Nanorobots will require onboard computing capability, and very tiny sensors and actuators. Fortunately, advances in biomolecular computing, bio-sensors, and actuators are promising to enable medical nanorobots to
DP1.7 The Hubble space telescope was repaired and modified in space on several occasions [44, 46, 49]. One challenging problem with controlling the Hubble is damping the jitter that vibrates the spacecraft each time it passes into or out of the Earth’s shadow. The worst vibration has a period of
!!~!!~!!DP1.6 Vehicle traction control, which includes antiskid braking and antispin acceleration, can enhance vehicle performance and handling. The objective of this control is to maximize tire traction by preventing locked brakes as well as tire spinning during acceleration.Wheel slip, the
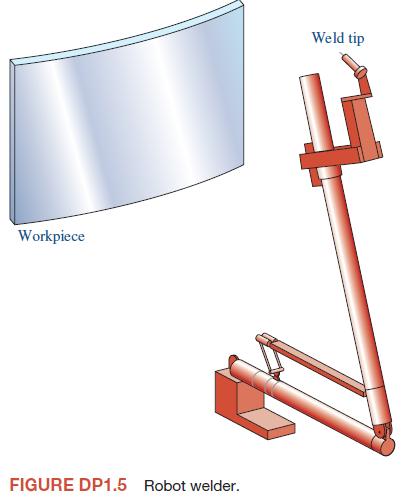
DP1.5 A large, braced robot arm for welding large structures is shown in Figure DP1.5. Sketch the block diagram of a closed-loop feedback control system for accurately controlling the location of the weld tip. Workpiece FIGURE DP1.5 Robot welder. Weld tip
!!~!!~!!DP1.4 As part of the automation of a dairy farm, the automation of cow milking is under study [36]. Design a milking machine that can milk cows four or five times a day at the cow’s demand. Sketch a block diagram and indicate the devices in each block.
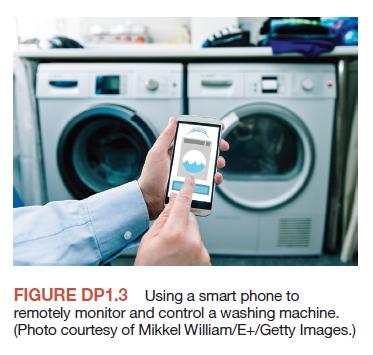
DP1.3 Describe a feedback control system in which a user utilizes a smart phone to remotely monitor and control a washing machine as illustrated in Figure DP1.3. The control system should be able to start and stop the wash cycle, control the amount of detergent and the water temperature, and
DP1.2 Aircraft are fitted with autopilot control that, at the press of a button, automatically controls the flight path of an aircraft, without manual control by a pilot.In this way, the pilot can focus on monitoring the flight path, weather, and onboard systems. Design a feedback control in block
Background noise affects the audio output quality of a headphone. Noise-cancelling headphones use active noise control to reduce this unwanted ambient noise. Sketch a block diagram of an “active noise control”feedback system that will reduce the effect of unwanted noise. Indicate the device
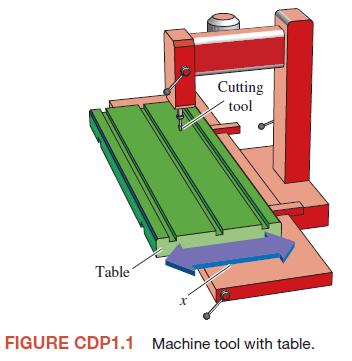
Increasingly stringent requirements of modern, high-precision machinery are placing increasing demands on slide systems [53]. The typical goal is to accurately control the desired path of the table shown in Figure CDP1.1. Sketch a block diagram model of a feedback system to achieve the desired
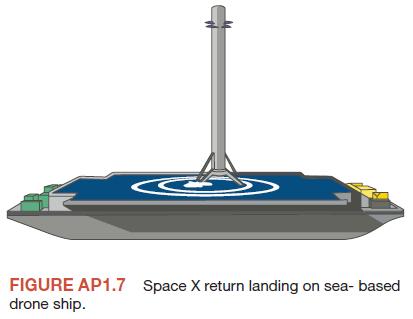
AP1.7 Space X has developed a very important system to allow for recovery of the first stage of their Falcon rocket at sea, as depicted in Figure AP1.7. The landing ship is an autonomous drone ship. Sketch a block diagram describing a control system that would control the pitch and roll of the
The robotic vacuum cleaner depicted in Figure AP1.6 is an example of a mechatronic system that aids humans in maintaining their homes. A dirt detection control system would enable the robotic vacuum cleaner to vacuum the same area more than once if the dirt level is unsatisfactory, since a single
The Burj Dubai is the tallest building in the world[94]. The building, shown in Figure AP1.5, stands at over 800 m with more than 160 stories. There are 57 elevators servicing this tallest free-standing structure in the world. Traveling at up to 10 m/s, the elevators have the world’s longest
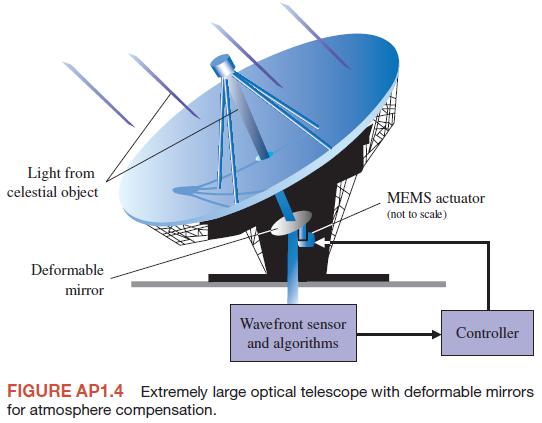
AP1.4 Adaptive optics has applications to a wide variety of key control problems, including imaging of the human retina and large-scale, ground-based astronomical observations [98]. In both cases, the approach is to use a wavefront sensor to measure distortions in the incoming light and to actively
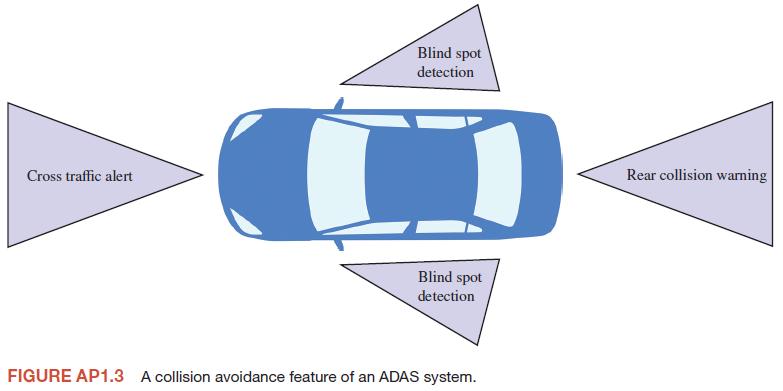
AP1.3 Many modern luxury automobiles have an advanced driver-assistance systems (ADAS) option.The collision avoidance feature of an ADAS system uses radars to detect nearby obstacles to notify drivers of potential collisions. Figure AP1.3 illustrates the collision avoidance feature of an ADAS
AP1.2 Advanced wind energy systems are being installed in many locations throughout the world as a way for nations to deal with rising fuel prices and energy shortages, and to reduce the negative effects of fossil fuel utilization on the quality of the air. The modern windmill can be viewed as a
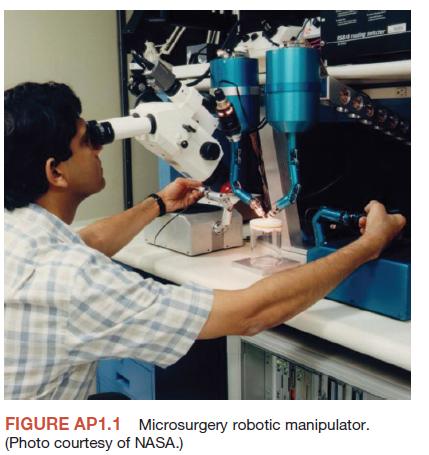
The development of robotic microsurgery devices will have major implications on delicate eye and brain surgical procedures. One such device is shown in Figure AP1.1. Haptic (force and tactile) feedback can greatly help a surgeon by mimicking the physical interaction that takes place between the
P1.27 A direct methanol fuel cell is an electrochemical device that converts a methanol water solution to electricity [75]. Like rechargeable batteries, fuel cells directly convert chemicals to energy; they are very often compared to batteries, specifically rechargeable batteries. However, one
P1.26 NASA is developing a compact rover designed to transmit data from the surface of an asteroid back to Earth, as illustrated in Figure P1.26.The rover will use a camera to take panoramic shots of the asteroid surface. The rover can position itself so that the camera can be pointed straight down
P1.25 In the past 50 years, over 20,000 metric tons of hardware have been placed in Earth’s orbit. During the same time span, over 15,000 metric tons of hardware returned to Earth. The objects remaining in Earth’s orbit range in size from large operational spacecraft to tiny flecks of paint.
P1.24 An innovation for an intermittent automobile windshield wiper is the concept of adjusting its wiping cycle according to the intensity of the rain[54]. Sketch a block diagram of the wiper control system.
P1.23 Engineers at the Science University of Tokyo are developing a robot with a humanlike face [52]. The robot can display facial expressions, so that it can work cooperatively with human workers. Sketch a block diagram for a facial expression control system of your own design.
P1.22 Engineers want to design a control system that will allow a building or other structure to react to the force of an earthquake much as a human would.The structure would yield to the force, but only so much, before developing strength to push back [47].Develop a block diagram of a control
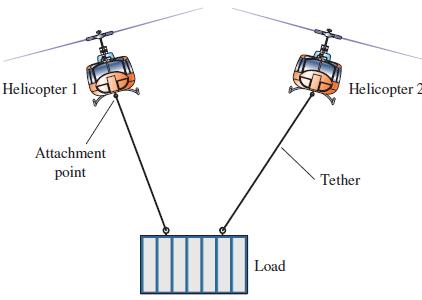
The potential of employing two or more helicopters for transporting payloads that are too heavy for a single helicopter is a well-addressed issue in the civil and military rotorcraft design arenas [37].Overall requirements can be satisfied more efficiently with a smaller aircraft by using multilift
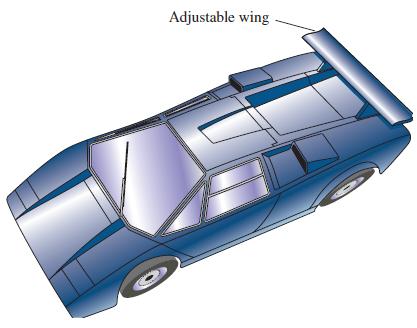
A high-performance race car with an adjustable wing (airfoil) is shown in Figure P1.20. Develop a block diagram describing the ability of the airfoil to keep a constant road adhesion between the car’s tires and the race track surface. Why is it important to maintain good road adhesion? Adjustable
Ichiro Masaki of General Motors has patented a system that automatically adjusts a car’s speed to keep a safe distance from vehicles in front. Using a video camera, the system detects and stores a reference image of the car in front. It then compares this image with a stream of incoming live
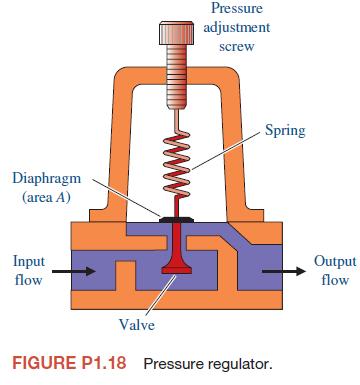
A cutaway view of a commonly used pressure regulator is shown in Figure P1.18. The desired pressure is set by turning a calibrated screw. This compresses the spring and sets up a force that opposes the upward motion of the diaphragm.The bottom side of the diaphragm is exposed to the water pressure
P1.17 Baseball players use feedback to judge a fly ball and to hit a pitch [35]. Describe a method used by a batter to judge the location of a pitch so that he can have the bat in the proper position to hit the ball.
P1.16 All humans have experienced a fever associated with an illness. A fever is related to the changing of the control input in the body’s thermostat. This thermostat, within the brain, normally regulates temperature near 98°F in spite of external temperatures ranging from 0°F to 100°F or
P1.15 Small computers are used as part of a start-stop system in automobiles to control emissions and obtain improved gas mileage. A computer-controlled start-stop system that automatically stops and restarts an engine to reduce the time the engine idles could improve gas mileage and reduce
P1.14 Adam Smith (1723–1790) discussed the issue of free competition between the participants of an economy in his book Wealth of Nations. It may be said that Smith employed social feedback mechanisms to explain his theories [41]. Smith suggests that (1)the available workers as a whole compare
A common example of a two-input control system is an automobile power transmission system, with a gear shifter and an accelerator pedal. The objective is to obtain (1) a desired speed and (2) a desired torque.Sketch a block diagram of the closed-loop control system.
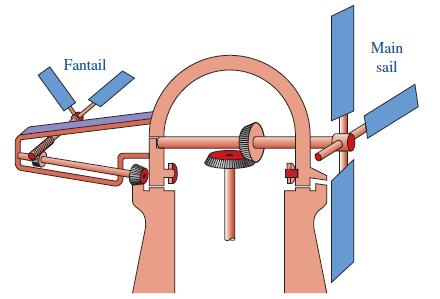
P1.12 An automatic turning gear for windmills was invented by Meikle in about 1750 [1, 11]. The fantail gear shown in Figure P1.12 automatically turns the windmill into the wind. The fantail windmill at right angle to the mainsail is used to turn the turret.The gear ratio is of the order of 3000 to
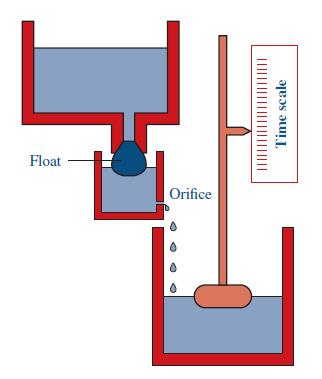
P1.11 Automatic control of water level using a float level was used in the Middle East for a water clock[1, 11]. The water clock (Figure P1.11) was used from sometime before Christ until the 17th century.Discuss the operation of the water clock, and establish how the float provides a feedback
The role of air traffic control systems is increasing as airplane traffic increases at busy airports.Engineers are developing air traffic control systems and collision avoidance systems using the Global Positioning System (GPS) navigation satellites [34, 55]. GPS allows each aircraft to know its
P1.9 Models of physiological control systems are valuable aids to the medical profession. A model of the heart-rate control system is shown in Figure P1.9 [23, 48]. This model includes the processing of the nerve signals by the brain. The heart-rate control system is, in fact, a multivariable
In a public address system, when the microphone is placed too close to the loudspeaker, a positive feedback system is inadvertently created. The audio input from the microphone is amplified, which comes out through the loudspeaker. This audio output is received by the microphone again, which gets
P1.7 The story is told about the sergeant who stopped at the jewelry store every morning at nine o’clock and compared and reset his watch with the chronometer in the window. Finally, one day the sergeant went into the store and complimented the owner on the accuracy of the chronometer.“Is it
P1.6 Feedback systems do not always involve negative feedback. Economic inflation, which is evidenced by continually rising prices, is a positive feedback system.A positive feedback control system, as shown in Figure P1.6, adds the feedback signal to the input signal, and the resulting signal is
A light-seeking control system, used to track the sun, is shown in Figure P1.5. The output shaft, driven by the motor through a worm reduction gear, has a bracket attached on which are mounted two photocells. Complete the closed-loop system so that the system follows the light source.
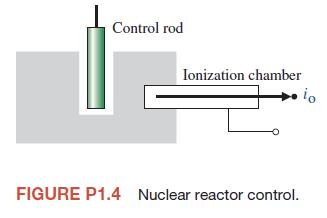
The accurate control of a nuclear reactor is important for power system generators. Assuming the number of neutrons present is proportional to the power level, an ionization chamber is used to measure the power level. The current io is proportional to the power level. The position of the graphite
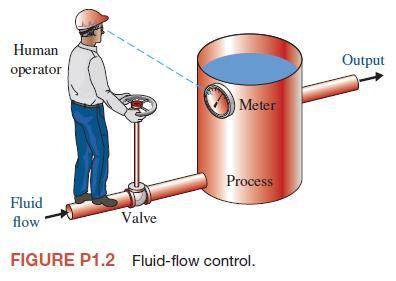
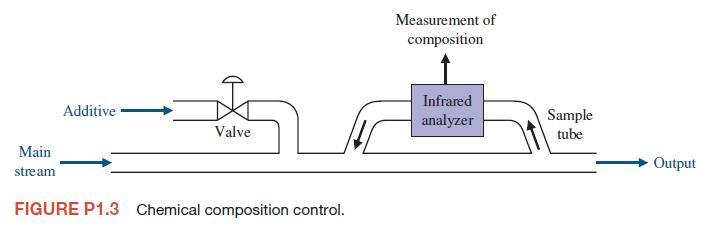
P1.2 Control systems can use a human operator as part of a closed-loop control system. Sketch the block diagram of the valve control system shown in Figure P1.2.P1.3 In a chemical process control system, it is valuable to control the chemical composition of the product.To do so, a measurement of
Automobiles have variable windshield wiper speed settings for different rain intensity. Sketch a block diagram of a wiper system where the driver sets the wiper speed. Identify the function of each element of the variable speed control of the wiper system.
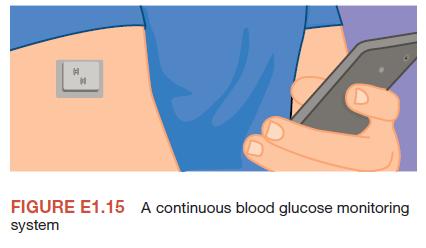
For people with diabetes, keeping track of and maintaining blood glucose at safe levels is very important.Continuous blood glucose monitors and readers are available that enable a measurement of blood glucose with a painless scan rather than a fingerprick, as illustrated in Figure E1.15. Sketch a
Sketch a block diagram of a person playing a video game. Suppose that the input device is a joystick and the game is being played on a desktop computer.
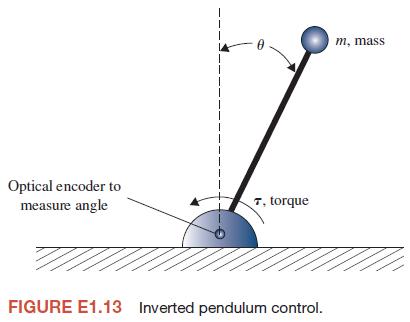
E1.13 Consider the inverted pendulum shown in Figure E1.13. Sketch the block diagram of a feedback control system. Identify the process, sensor, actuator, and controller. The objective is keep the pendulum in the upright position, that is to keep u = 0, in the presence of disturbances. Optical
E1.12 Unmanned aerial vehicles (UAVs) are being developed to operate in the air autonomously for long periods of time. By autonomous, we mean that there is no interaction with human ground controllers.Sketch a block diagram of an autonomous UAV that is tasked for crop monitoring using aerial
E1.11 Future advanced commercial aircraft will be E-enabled. This will allow the aircraft to take advantage of continuing improvements in computer power and network growth. Aircraft can continuously communicate their location, speed, and critical health parameters to ground controllers, and gather
E1.10 Describe the process of human biofeedback used to regulate factors such as pain or body temperature.Biofeedback is a technique whereby a human can, with some success, consciously regulate pulse, reaction to pain, and body temperature.
E1.9 Describe the block diagram of the control system of a skateboard with a human rider.
E1.8 An autonomous self-driving vehicle can sense its environment and navigate without human input.Describe a simplified feedback control system for a guidance system that ensures the vehicle navigates its surroundings safely.
E1.7 Because a sailboat cannot sail directly into the wind, and traveling straight downwind is usually slow, the shortest sailing distance is rarely a straight line. Thus sailboats tack upwind—the familiar zigzag course—and jibe downwind. A tactician’s decision of when to tack and where to go
E1.6 An autofocus camera will adjust the distance of the lens from the film by using a beam of infrared or ultrasound to determine the distance to the subject[42]. Sketch a block diagram of this control system, and briefly explain its operation.
E1.5 Fly-fishing is a sport that challenges the person to cast a small feathery fly using a light rod and line.The goal is to place the fly accurately and lightly on the distant surface of the stream [59]. Describe the fly-casting process and a model of this process.
E1.4 A surgeon uses a control system, that is a robot surgical system, to perform surgery remotely. Sketch a block diagram to illustrate this feedback system.
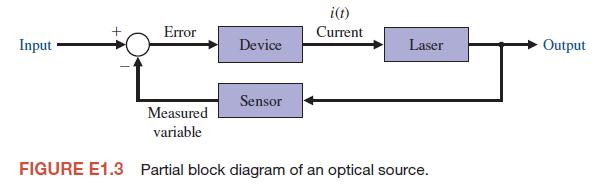
E1.3 A CD player laser beam focusing system has an array of photodiodes that is used to determine if the laser beam is in focus. The laser beam focus is controlled by an input current to a lens focusing motor. A microprocessor controls the input current to the motor by comparing the output from the
E1.2 Describe typical actuators that can convert the following[93]:a. Mechanical energy to fluidic energyb. Mechanical energy to electrical energyc. Electrical energy to mechanical energyd. Kinetic energy to electrical energye. Electrical energy to heat
Describe typical sensors that can measure each of the following [93]:a. Linear positionb. Velocity (or speed)c. Nongravitational accelerationd. Rotational position (or angle)e. Rotational velocityf. Temperature g. Pressure h. Liquid (or gas) flow rate i. Torque j. Force k. Earth’s magnetic field
15. Closed-loop control systems should have which of the following properties:a. Good regulation against disturbancesb. Desirable responses to commandsc. Low sensitivity to changes in the plant parametersd. All of the above
14. Control engineering is applicable to which fields of engineering?a. Mechanical and aerospaceb. Electrical and biomedicalc. Chemical and environmentald. All of the above
13. A system with more than one input variable or more than one output variable is known by what name?a. Closed-loop feedback systemb. Open-loop feedback systemc. Multivariable control systemd. Robust control system
12. Complete the following sentence:An open-loop control system utilizes an actuating device to control a process .a. without using feedbackb. using feedbackc. in engineering designd. in engineering synthesis
11. Early pioneers in the development of systems and control theory include:a. H. Nyquistb. H. W. Bodec. H. S. Blackd. All of the above
10. Complete the following sentence:Control engineers are concerned with understanding and controlling segments of their environments, often called .a. systemsb. design synthesisc. trade-offsd. risk
9. Complete the following sentence:are intrinsic in the progression from an initial concept to the final product.a. Closed-loop feedback systemsb. Flyball governorsc. Design gapsd. Open-loop control systems
8. Complete the following sentence:Control of an industrial process by automatic rather than manual means is often called.a. negative feedbackb. automationc. a design gapd. a specification
7. Important modern applications of control systems include which of the following?a. Safe automobilesb. Autonomous robotsc. Automated manufacturingd. All of the above
6. Early applications of feedback control include which of the following?a. Water clock of Ktesibiosb. Watt’s flyball governorc. Drebbel’s temperature regulatord. All of the above
5. A multivariable system is a system with more than one input and/or more than one output. True or False
4. The block diagram in Figure 1.30 is an example of a closed-loop feedback system. True or False
3. Engineering synthesis and engineering analysis are the same. True or False
2. A closed-loop control system uses a measurement of the output and feedback of the signal to compare it with the desired input. True or False
1. The flyball governor is generally agreed to be the firstautomatic feedback controller used in an industrial process. True or False
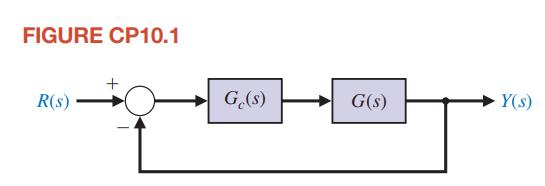
Consider the control system in Figure CP10.1, WhereDevelop an m-file to show that the phase margin is approximately P.M. = 50° and that the percent overshoot to a unit step input is approximately P.O. = 18%. G(s) = 1 S + 9.5 and Ge(s) 99 S
A unity feedback system has a loop transfer functionDetermine the phase margin and the crossover frequency. L(s) = G(s)G(s) 15 s(1 + 0.01s) (1 + 0.1s)
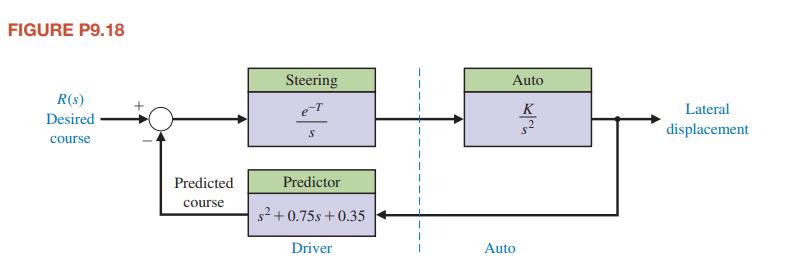
A model of an automobile driver attempting to steer a course is shown in Figure P9.18, where K = 6.0. (a) Find the frequency response and the gain and phase margins when the reaction time T = 0. (b) Find the phase margin when the reaction time is T = 0.15 s.(c) Find the reaction time that
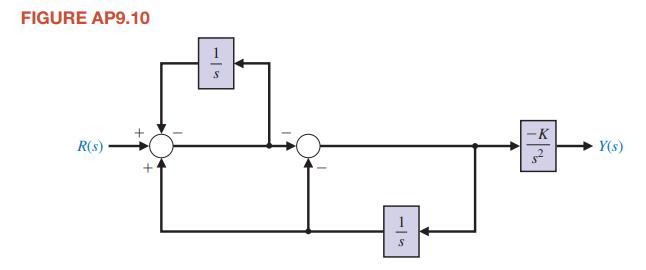
A multiloop block diagram is shown in Figure AP9.10. (a) Compute the transfer function T(s) = Y(s)/R(s). (b) Determine K such that the steady-state tracking error to a unit step input R(s) = 1/s is zero. Plot the unit step response.(c) Using K from part (b), compute the system bandwidth
Consider a unity feedlach system with the loop transfer functionDevelop an m-file to plot the bandwidth of the closed- loop system as K varies in the interval 1 ≤ K ≤ 80. L(s)=G(s)G(s): = K(s + 25) s(s+10)(s+20)
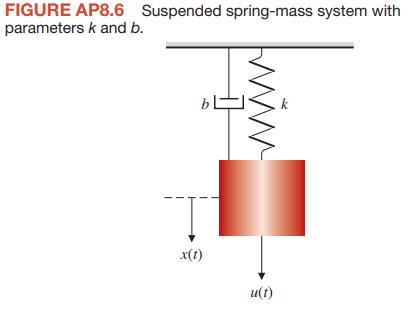
Consider the spring-mass system depicted in Figure AP8.6. Develop a transfer function model to describe the motion of the mass M = 2 kg, when the input is u(t) and the output is x(t). Assume that the initial conditions are x(0) = 0 and x(0) = 0. Determine values of k and b such that the maximum
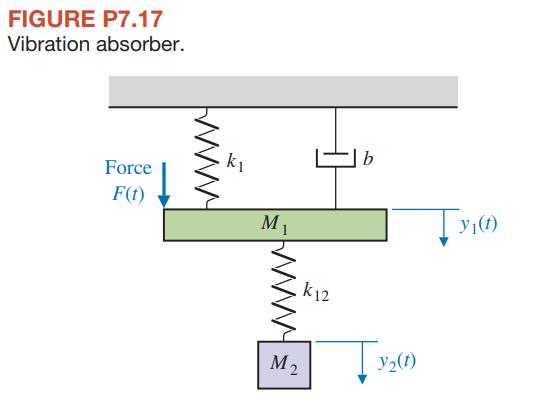
Consider the vibration absorber in Figure P7.17 Using the root locus method, determine the effect of the parameters M2 and k12 .Determine the specific values of the parameters M2 and k12 so that the mass M? does not vibrate when F(t) = a sin (wot). Assumethat M? = 1, k? = 1, and b = 1. Also assume
Suppose that the dynamics of the motorcycle and rider can be represented by the loop transfer functionSketch the root locus for the system. Determine the damping ratio of the dominant roots when K = 3 x 104. Ge(s) G(s): = K(s² +30s +625) s(s+20) (s² +20s+200) (s² +60s +3400)
Consider the closed-loop transfer functionDevelop an m-file to, obtain the Bode plot and verify that the resonant frequency is 7 rad/s and that the peak magnitude Mpω is 17 dB. T(s) = 50 s² + s +50
A unity feedback system has a loop transfer function Where K = 20. Find the roots of the closed-loop system’s characteristic equation. L(s): = K (s+1)(s+3)(s+ 6)'
A system with a transfer function Y(s)/R(s) is Determine the steady-state error to a unit step input. Is the system stable? Y(s) R(s) 15(s+2) s4 +85³ +2s²2 + 3s +1
Showing 1100 - 1200
of 1299
1
2
3
4
5
6
7
8
9
10
11
12
13
Step by Step Answers