New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
linear algebra and its applications
Linear Algebra And Its Applications 6th Global Edition David Lay, Steven Lay, Judi McDonald - Solutions
Explain what is wrong with the following discussion: Let f(t) = 1 + t and g(t) = 1 - t2, and note that g(t) = (1 - t)f(t). Then {f, g} is linearly dependent because g is a multiple of f.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) A change-of-coordinates matrix is always invertible.
Find a basis for the set of all vectors of the form a + 2b + 3c 2a + 3b + 4c 3a + 4b + 5c 4a + 5b + 6c (Be careful.)
For each subspace,(a) Find a basis(b) State the dimension s- 2t S s+t 3t : s,t in R
Let B = {b1, b2} and C = {c1, c2} be bases for a vector space V, and suppose b1 = 6c1 - 2c2 and b2 = 9c1 - 4c2. a. Find the change-of-coordinates matrix from B to C. b. Find [x]C for x = -3b1 + 2b2. Use part (a).
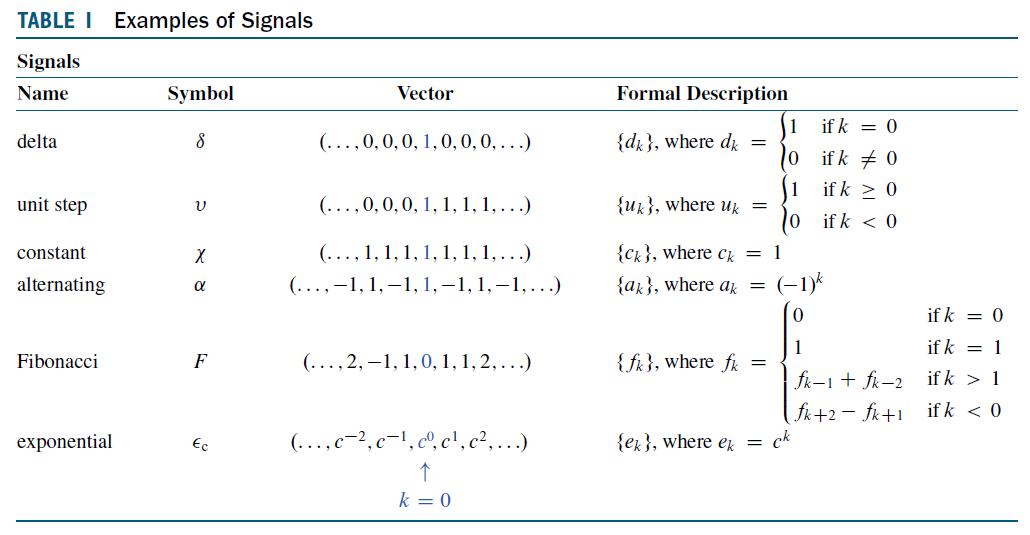
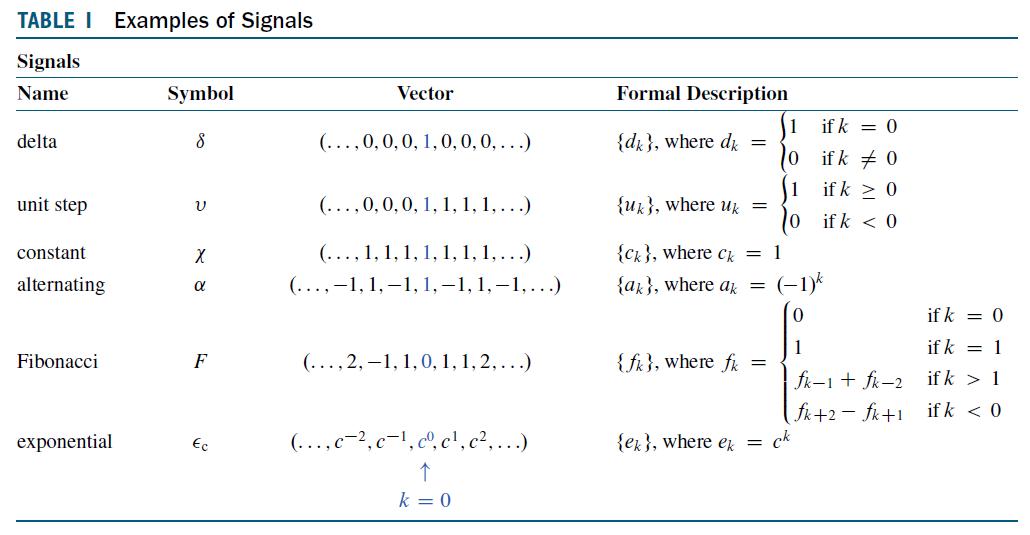
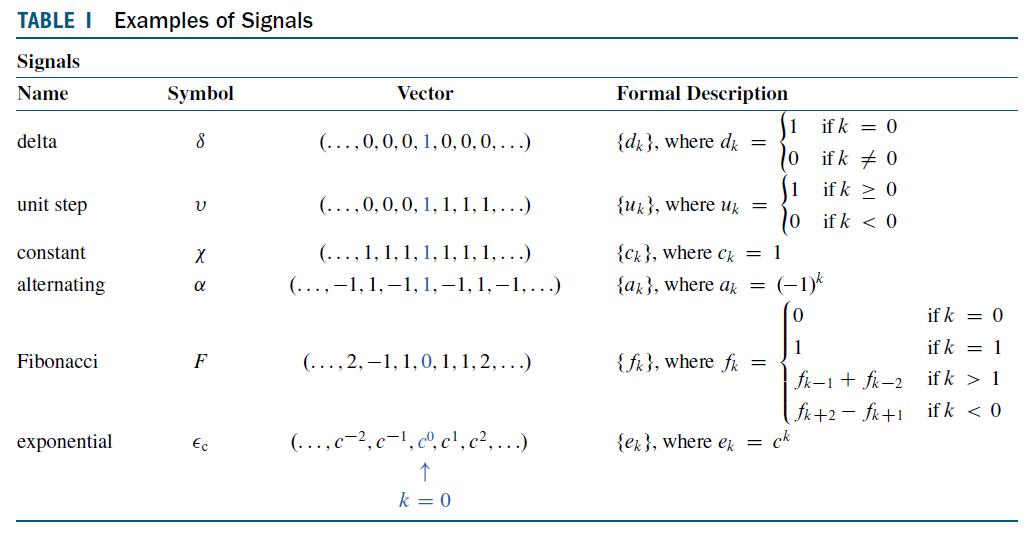
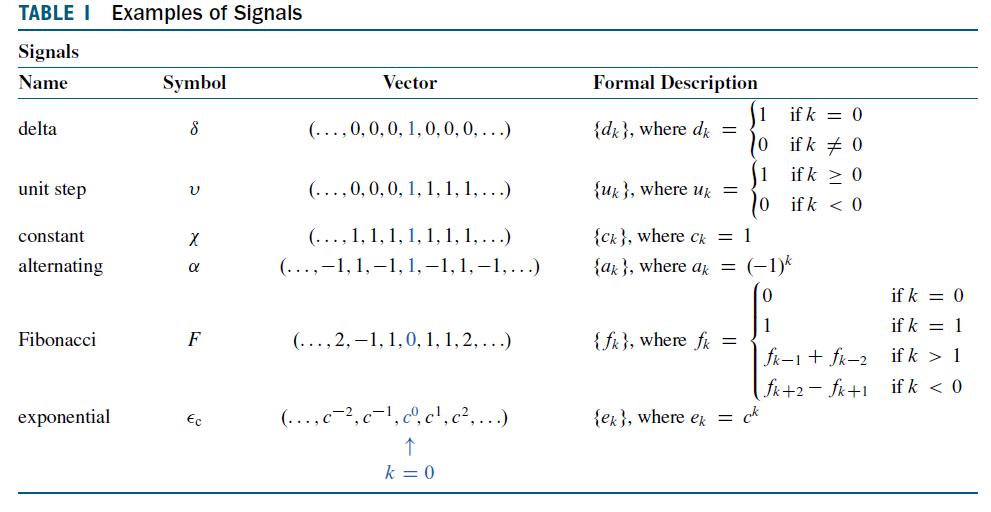
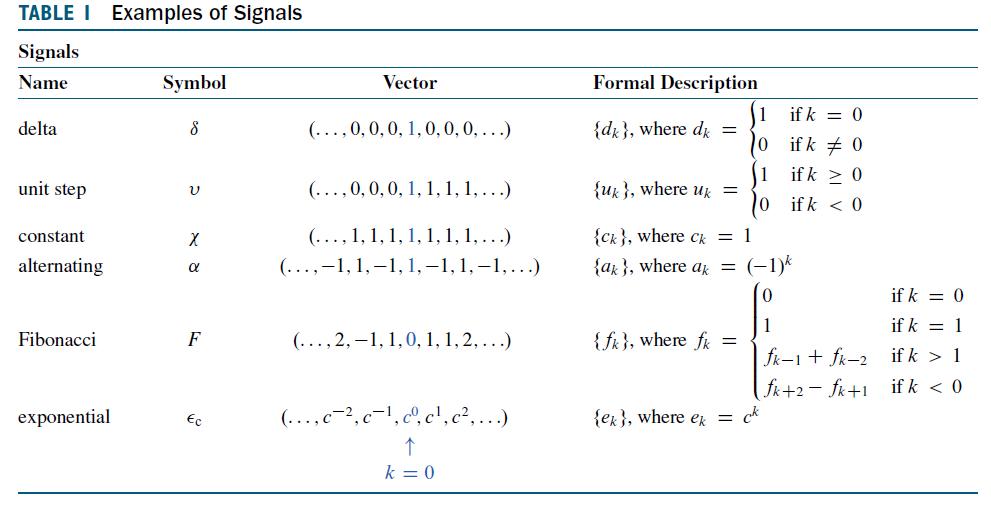
Find the indicated sums of the signals in Table 1.χ - αData from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0, 0, 1, 1, 1, 1, ...) (..., 1, 1, 1, 1, 1, 1, 1,
Verify that the signals are solutions of the accompanying difference equation. 2, (-4); yk+2+ 2yk+1-8yk = 0
Let B = {b1, b2} and C = {c1, c2} be bases for a vector space V, and suppose b1 = - c1 +4c2 and b2 = 5c1 - 3c2. a. Find the change-of-coordinates matrix from B to C. b. Find [x]C for x = 5b1 + 3b2.
For each subspace,(a) Find a basis(b) State the dimension 5s -t -t: s,te R -7s
Verify that the signals are solutions of the accompanying difference equation. 4k, (-4); Yk+2-16yk = 0
For each subspace,(a) Find a basis(b) State the dimension 2c a-b b - 3c a + 2b : a, b, c in R
Let u = {u1, u2} and W = {w1, w2} be bases for V, and let P be a matrix whose columns are [u1]w and [u2]w. Which of the following equations is satisfied by P for all x in V?(i)(ii) M[x]d=¹[x]
For each subspace,(a) Find a basis(b) State the dimension a+b 2a 3a-b -b : a, b in R
Show that the signals form a basis for the solution set of the accompanying difference equation. The signals and equation in Exercise 2Data from in Exercise 2The signals are solutions of the accompanying difference equation. 4k, (-4); Yk+2-16yk = 0
Let A = {a1, a2, a3} and D = {d1, d2, d3} be bases for V, and let P = [[d1]A [d2]A]. Which of the following equations is satisfied by P for all x in V?(i)(ii) [x] A = P[x]D
For each subspace,(a) Find a basis(b) State the dimension a-4b-2c 2a + 5b-4c -a + 2c -3a + 7b + 6c : a, b, c in R
Let A = {a1, a2, a3} and B = {b1, b2, b3} be bases for a vector space V, and suppose a1 = 4b1 - b2, a2 = -b1 + b2 + b3, and a3 = b2 - 2b3. a. Find the change-of-coordinates matrix from A to B. b. Find [x]B for x = 3a1 + 4a2 + a3.
Show that the signals form a basis for the solution set of the accompanying difference equation. (-3)k, k(-3); Yk+2 +6yk+1 +9yk = 0
Let D = {d1, d2, d3} and F = {f1, f2, f3} be bases for a vector space V, and suppose f1 = 2d1 - d2 + d3, f2 = 3d2 + d3, and f3 = -3d1 + 2d3. a. Find the change-of-coordinates matrix from F to D.b. Find [x]D for x = f1 2f2 + 2f3.
For each subspace,(a) Find a basis(b) State the dimension 3a + 6b-c 6a-2b-2c -9a +5b + 3c -3a+b+c : a, b, c in R
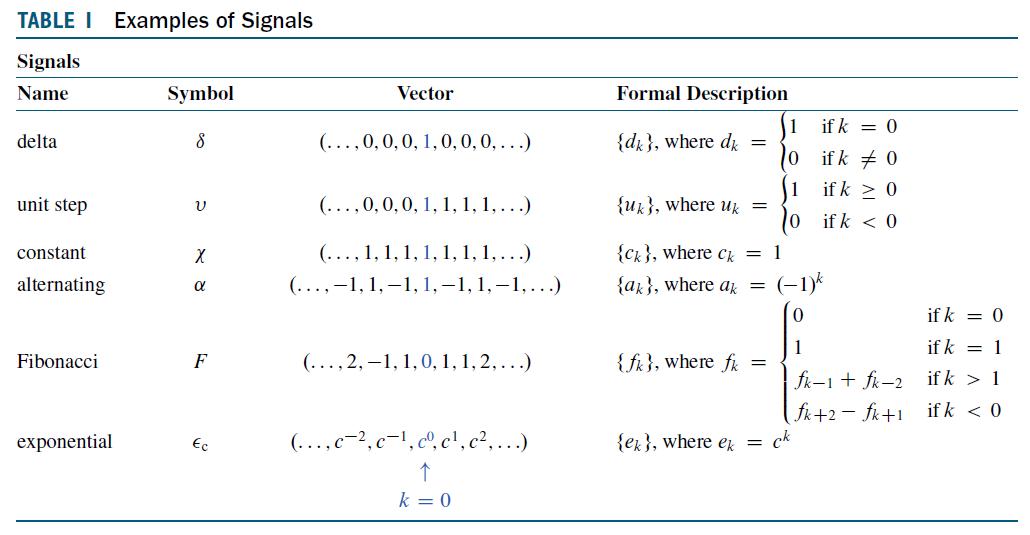
Recall that I({xk})= {xk} and S({xk}) = {Xk-1}.Which signals from Table 1 are in the kernel of I _ S?Data from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0, 0, 1,
Recall that I({xk})= {xk} and S({xk}) = {Xk-1}.Which signals from Table 1 are in the kernel of I - S - S2?Data from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0,
For each subspace,(a) Find a basis(b) State the dimension {(a, b, c, d): a-3b + c = 0}
Let B = {b1, b2} and C = {c1, c2} be bases for R2. In each exercise, find the change-of-coordinates matrix from B to C and the change-of-coordinates matrix from C to B. b₁ b - [¯ i]·b - [¯†]-« - [i]-~ - [t] b₂ = =
Recall that I({xk})= {xk} and S({xk}) = {Xk-1}.Which signals from Table 1 are in the kernel of I - cS for a fixed nonzero scalar c ≠ 1?Data from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0,
Assume the signals listed are solutions of the given difference equation. Determine if the signals form a basis for the solution space of the equation. Justify your answers using appropriate theorems. 1k, 3k, (-3)*; Yk+3Yk+2-9yk+1 +9yk = 0
For each subspace,(a) Find a basis(b) State the dimension {(a, b, c) a 3b + c = 0,b-2c = 0,2b-c = 0} -
Let B = {b1, b2} and C = {c1, c2} be bases for R2. In each exercise, find the change-of-coordinates matrix from B to C and the change-of-coordinates matrix from C to B. b₁ = [3]. 12 b2 = [²1₁]₁₁₁ = [ ] ₁ ₂ = [] 2
Show that the signals form a basis for the solution set of the accompanying difference equation. 5k cos, 5k sin: Yk+2 +25yk = 0
Assume the signals listed are solutions of the given difference equation. Determine if the signals form a basis for the solution space of the equation. Justify your answers using appropriate theorems. 2k, 4k, (-5); Yk+3-Yk+2-22yk+1+40yk = 0
Show that T({xk}) = {xk - Xk-1} is a linear time invariant transformation.
Let B = {b1, b2} and C = {c1, c2} be bases for R2. In each exercise, find the change-of-coordinates matrix from B to C and the change-of-coordinates matrix from C to B. b₁ - [ -1] - [3] - - [1] - [ - ] b₂ · C1 C2 -2
Find a basis for the solution space of the difference equation. Prove that the solutions you find span the solution set. Yk+2 - Yk+1 + 3 yk = 0
B and C are bases for a vector space V. Justify each answer.(T/F) If V = R2, B = {b1,b2}, and C = {c1, c2}, then row reduction of [C1 C2 b1 b2] to [I P] produces a matrix P that satisfies [x]B = P[x]C for all x in V.
Find a nonzero signal in the range of T from Exercise 9.Data from in Exercise 9.Show that T({xk}) = {xk - Xk-1} is a linear time invariant transformation.
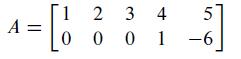
Determine the dimensions of Nul A, Col A, and Row A for the matrices. A 1 2 3 4 0 0 0 1 5 -6
Assume the signals listed are solutions of the given difference equation. Determine if the signals form a basis for the solution space of the equation. Justify your answers using appropriate theorems. 1,(-1); Yk+4-2yk+2+ k = 0
Find a nonzero signal in the kernel of M3 from Exercise 10.Data from in Exercise 10Show thatis a linear time invariant transformation. (²x + 1-2x + 7-1x) = { = ({x}) {W 3 {(x₂
B and C are bases for a vector space V. Justify each answer.(T/F) If V = Rn and C is the standard basis for V, thenis the same as the change-of-coordinates matrix PB introduced. P c-B в
B and C are bases for a vector space V. Justify each answer.(T/F) The columns ofare linearly independent. D Р C-B
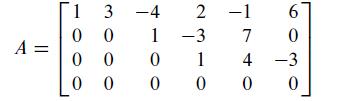
Determine the dimensions of Nul A, Col A, and Row A for the matrices. A = 23-0 13 -4 00 1 0 00 00 0 0 0 -1 7 1 4 6 0 -3 0
Assume the signals listed are solutions of the given difference equation. Determine if the signals form a basis for the solution space of the equation. Justify your answers using appropriate theorems. (-1), 3k; Yk+3+ Yk+2-9yk+1-9yk = 0
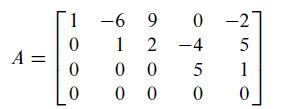
Determine the dimensions of Nul A, Col A, and Row A for the matrices. A = 1 0 0 0 -69 0-2 5 1 0 12 -4 00 5 00 0
Find a nonzero signal in the kernel of T from Exercise 9.Data from in Exercise 9. Show that T({xk}) = {xk - Xk-1} is a linear time invariant transformation.
B and C are bases for a vector space V. Justify each answer.(T/F) The columns of the change-of-coordinates matrixare B-coordinate vectors of the vectors in C. P C-B
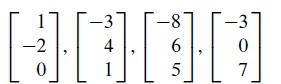
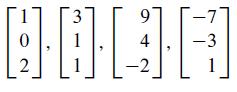
Find the dimension of the subspace spanned by the given vectors. -8 HOD 4 6 5 -2 0 7
Let B = {b1, b2} and C = {c1, c2} be bases for R2. In each exercise, find the change-of-coordinates matrix from B to C and the change-of-coordinates matrix from C to B. 8 b₁ = = [ 3 ]· m₂ = [ _ 1] · 9 = [1] · ₂ =[]}] C1 C2 -3 3
Assume the signals listed are solutions of the given difference equation. Determine if the signals form a basis for the solution space of the equation. Justify your answers using appropriate theorems. (-1),k(-1)k, 5k; yk+3-3yk+2-9yk+1-5yk = 0
Assume the signals listed are solutions of the given difference equation. Determine if the signals form a basis for the solution space of the equation. Justify your answers using appropriate theorems. 1k, 3k cos , 3k sin ; Yk+3− Yk+2 +9yk+1-9yk = 0
Find the dimension of the subspace spanned by the given vectors. 9 BODE 4 -2 0 2 -7 -3 1
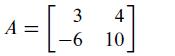
Determine the dimensions of Nul A, Col A, and Row A for the matrices. A = 3 -6 ننا 4 10
Find a basis for the solution space of the difference equation. Prove that the solutions you find span the solution set. Yk+29yk+1+14yk = 0
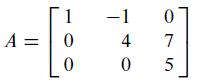
Determine the dimensions of Nul A, Col A, and Row A for the matrices. A || 1 0 0 -1 4 0 0 75
V is a vector space and A is an m x n matrix. Justify each answer.(T/F) The set of signals of length n, Sn, has a basis with n + 1 signals.
In P2, find the change-of-coordinates matrix from the basis B = {1 - 2t + t2, 3 - 5t + 4t2, 2t + 3t2} to the standard basis C = {1, t, t2}. Then find the B-coordinate vector for -1 + 2t.
Concern a simple model of the national economy described by the difference equationHere Yk is the total national income during year k, a is a constant less than 1, called the marginal propensity to consume, and b is a positive constant of adjustment that describes how changes in consumer spending
Recall from calculus that integrals such asare tedious to compute. (The usual method is to apply integration by parts repeatedly and use the half-angle formula.) Use the matrix P or P-1. To transform (10); then compute the integral. [(5 cos t t - 6 cost + 5 cos5 t - 12 cos t) dt (10)
Concern a simple model of the national economy described by the difference equationHere Yk is the total national income during year k, a is a constant less than 1, called the marginal propensity to consume, and b is a positive constant of adjustment that describes how changes in consumer spending
If the initial conditions are changed to y0 = 1 and y1 = 2 for the Fibonacci sequence in Exercise 17, list the terms of the sequence for k = 2, 3, 4 and 5. Find the solution to the difference equation from 17 with these new initial conditions.Data from in Exercise 17The Fibonacci Sequence is
V is a vector space and A is an m x n matrix. Justify each answer.(T/F) Every linear time invariant transformation is a linear transformation.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The dimension of the vector space P4 is 4.
V is a vector space and A is an m x n matrix. Justify each answer.(T/F) The moving average function is a linear time invariant transformation.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The number of variables in the equation Ax = 0 equals the nullity A.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) A plane in R3 is a two-dimensional subspace of R3.
V is a vector space and A is an m x n matrix. Justify each answer.(T/F) The vector space Rn+1 is a subspace of S.
The Fibonacci Sequence is listed in Table 1 of Section 4.7. It can be viewed as the sequence of numbers where each number is the sum of the two numbers before it. It can be described as the homogeneous difference equationwith the initial conditions y0 = 0 and y1 = 1. Find the general solution of
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The number of pivot columns of a matrix equals the dimension of its column space.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) Every subspace of the set of signals S is infinite dimensional.
Find a basis for the solution space of the difference equation. Prove that the solutions you find span the solution set. 16yk +2 +8yk +1-3yk=0
In P2, find the change-of-coordinates sis B = {1 - 3t2, 2 + t - 5t2, 1+ 2t} to the standard basis. Then write + as a linear combination of the polynomials in B.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The set of signals, S, has a finite basis.
Determine the dimensions of Nul A, Col A, and Row A for the matrices. A = 0 0 4 7 0 0 0
Find a basis for the solution space of the difference equation. Prove that the solutions you find span the solution set. Yk+225yk = 0
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) If B is any echelon form of A, then the pivot columns of B form a basis for the column space of A.
Construct a linear time invariant transformation that has the signalin its kernel. {Xk} = k
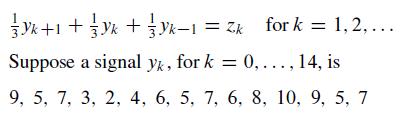
When a signal is produced from a sequence of measurements made on a process (a chemical reaction, a flow of heat through a tube, a moving robot arm, etc.), the signal usually contains random noise produced by measurement errors. A standard method of preprocessing the data to reduce the noise is to
Let B = {b1, b2}, C = {c1, c2}, and D= {d1, d2} be bases for a two dimensional vector space.a. Write an equation that relates the matricesand Justify your result.b. Use a matrix program either to help you find the equation or to check the equation you write. Work with three bases for R2. P P CLB,
Find the general solution of difference equation (15). Justify your answer. Yk+2 + 4yk+1+yk = 0 for k = 1,2,..., N-2 (15)
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The dimensions of the row space and the column space of A are the same, even if A is not square.
V is a vector space and A is an m x n matrix. Justify each answer.(T/F) If you scale a linear time invariant transformation by a fixed constant, the result is no longer a linear transformation.
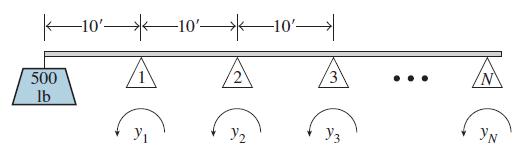
A lightweight cantilevered beam is supported at N points spaced 10 ft apart, and a weight of 500-lb is placed at the end of the beam, 10 ft from the first support, as in the figure. Let yk be the bending moment at the kth support. Then y1 = 5000 ft-lb. Suppose the beam is rigidly attached at the
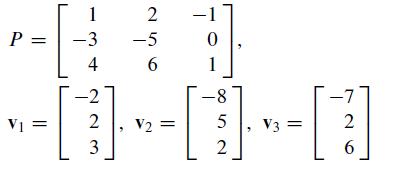
Leta. Find a basis {u1, u2, u3} for R3 such that P is the change-of-coordinates matrix from {u1, u2, u3} To the basis (v1, v2, v3}. b. Find a basis {w1, w2, w3} for R3 such that P is the change-of-coordinates matrix from {v1, v2, v3} to (w1, w2, w3}. P = Vi V] = 1 -3 4 -2 2 3 2 -5 6 V2
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The dimension of the vector space of signals, S, is 10.
V is a vector space and A is an m x n matrix. Justify each answer.(T/F) If you scale a signal by a fixed constant, the result is not a signal.
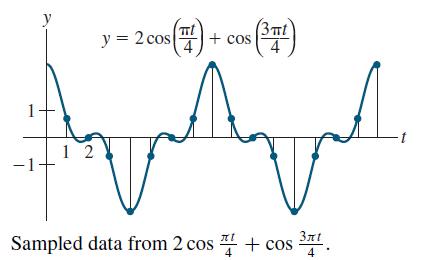
Let {yk} be the sequence produced by sampling the continuous signalas shown in the figure. The values of yk, beginning with k = 0, arewhere .7 is an abbreviation for √2/2.a. Compute the output signal {zk} when {yk} is fed into the filter in Example 2.b. Explain how and why the output in part (a)
Find a basis for the subspace W in Exercise 25. What is the dimension of this subspace?Data from in Exercise 25Letwhere r can be any real number. A typical signal in W looks likeShow that W is a subspace of S. 0 if k is a multiple of 2 W = = = { {{xx} [pok r f if k is not a multiple of 2
To a difference equation of the form yk+1_ ayk = b, for suitable constants a and b.A loan of $10,000 has an interest rate of 1% per month and a monthly payment of $450. The loan is made at month k = 0, and the first payment is made one month later, at k = 1. Fora. Write a difference equation
LetA typical signal in W looks likeShow that W is a subspace of S. Let W = = {x}|xk = (0 r ifk < 0 ifk 0 where r can be any real number.
To a difference equation of the form yk+1 _ ayk = b, for suitable constants a and b. At time k = 0, an initial investment of $1000 is made into a savings account that pays 6% interest per year compounded monthly. (The interest rate per month is .005.) Each month after the initial investment, an
Letwhere r can be any real number. A typical signal in W looks likeShow that W is a subspace of S. 0 if k is a multiple of 2 W = = = { {{xx} [pok r f if k is not a multiple of 2
Construct a linear time invariant transformation that has the signalin its kernel. {Xk} = = -3 4 k
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) A vector space is infinite-dimensional if it is spanned by an infinite set.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) The nullity of A is the number of columns of A that are not pivot columns.
V is a vector space and A is an m × n matrix. Justify each answer.(T/F) If a set {v1,...,vp} spans a finite-dimensional vector space V and if T is a set of more than p vectors in V, then T is linearly dependent.
Show that the given signal is a solution of the difference equation. Then find the general solution of that difference equation. Yk = k²; yk +2 +4yk+1-5yk = 8 + 12k
The first four Hermite polynomials are 1, 2t, - 2 + 4t2, and -12t + 8t3. These polynomials arise naturally in the study of certain important differential equations in mathematical physics. Show that the first four Hermite polynomials form a basis of P3.
Find a basis for the subspace W in Exercise 26. What is the dimension of this subspace?Data from in Exercise 26LetA typical signal in W looks likeShow that W is a subspace of S. Let W = = {x}|xk = (0 r ifk < 0 ifk ≥ 0 where r can be any real number.
Show that the given signal is a solution of the difference equation. Then find the general solution of that difference equation. Yk = 1+k; Yk+2-8yk+1 +15yk = 2 + 8k
The first four Laguerre polynomials are 1, 1 - t, 2 - 4t + t2, and 6 - 18t + 9t2 - t3. Show that these polynomials form a basis of P3.
Write the difference equations as first order systems, xk+1 = Axk, for all k. Yk+4-2yk +3-3yk+2 +8yk+1-4yk = 0
Showing 1200 - 1300
of 2241
First
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Last
Step by Step Answers