New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
linear algebra and its applications
Linear Algebra And Its Applications 6th Global Edition David Lay, Steven Lay, Judi McDonald - Solutions
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer.(T/F) If A and B are 2 x 2 with columns a₁, a2, and b₁,b₂, respectively, then AB = [a₁b₁ a₂b₂].
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer. (T/F) AT + BT = (A + B)
Ifdetermine the first and second columns of B. 1-3 A = [] and AB =[ А -3 8 3-2 3 1 -7
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer.(T/F) If A and B are 3 x 3 and B = [b₁ b2 b3], thenAB =[Ab₁ + Ab₂ + Ab3].
Mark each statement True or False (T/F). Justify each answer.(T/F) If A is an invertible n x n matrix, then the equation Ax = b is consistent for each b in Rn.
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer.(T/F) Each column of AB is a linear combination of the columns of B using weights from the corresponding column of A.
Mark each statement True or False (T/F). Justify each answer.(T/F) If A can be row reduced to the identity matrix, then A must be invertible.
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer.(T/F) The second row of AB is the second row of A multiplied on the right by B.
Mark each statement True or False (T/F). Justify each answer.(T/F) Each elementary matrix is invertible.
Mark each statement True or False (T/F). Justify each answer.(T/F) If A is invertible, then the elementary row operations that reduce A to the identity In also reduce A-¹ to In.
Let A be an invertible n x n matrix, and let B be an n x p matrix. Show that the equation AX = B has a unique solution A-¹ B.
Suppose A, B, and C are invertible n x n matrices. Show that ABC is also invertible by producing a matrix D such that (ABC) D = I and D (ABC) = I.
Suppose AB = AC, where B and C are n x p matrices and A is invertible. Show that B = C. Is this true, in general, when A is not invertible?
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer.(T/F) The transpose of a product of matrices equals the product of their transposes in the same order.
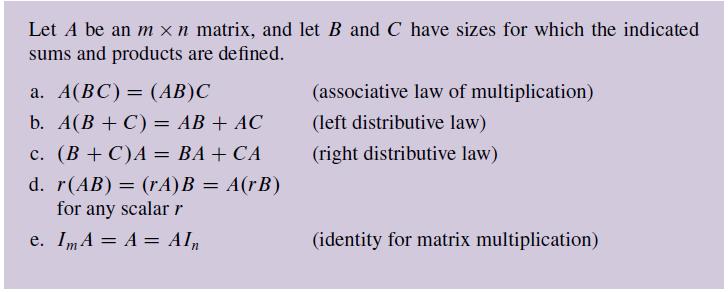
Prove Theorem 2(b) and 2(c). Use the row-column rule. The (i, j)-entry in A(B+C) can be written asData from in Theorem 2 " ai (b₁j + C₁j) + ... + ain(bnj + Cnj) or Σaik (bkj + Ckj) k=1
Suppose (B - C)D = 0, where B and C are m x n matrices and D is invertible. Show that B = C.
Show that if ad - bc = 0, then the equation Ax = 0 has more than one solution. Why does this imply that A is not invertible? are not both zero, consider the vector, X = -b a J
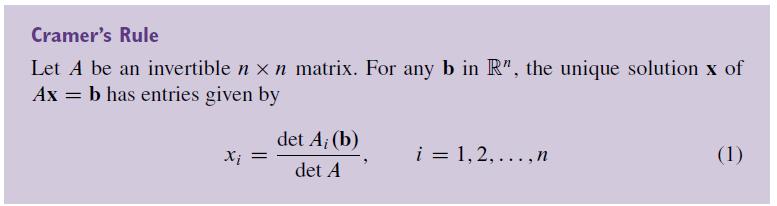
Suppose A is n x n and the equation Ax = 0 has only the trivial solution. Explain why A has n pivot columns and A is row equivalent to In. By Theorem 7, this shows that A mustbe invertible. Data from in Theorem 7 Cramer's Rule Let A be an invertible n × n matrix. For any b in R", the unique
Concern arbitrary matrices A, B, and C for which the indicated sums and products are defined. Mark each statement True or False (T/F). Justify each answer.(T/F) The transpose of a sum of matrices equals the sum of their transposes.
Suppose the first two columns, b₁ and b2, of B are equal. Whatcan you say about the columns of AB (if AB is defined)? Why?
Explain why the columns of an n x n matrix A span Rn when A is invertible.
Solve the equation AB = BC for A, assuming that A, B, and C are square and B is invertible.
View vectors in Rn as n x 1 matrices. For u and v in Rn, the matrix product ut v is a 1 x 1 matrix, called the scalar product, or inner product, of u and v. It is usually written as a single real number without brackets. The matrix product uv is an n x n matrix, called the outer product of u and v.
Suppose the third column of B is the sum of the first two columns. What can you say about the third column of AB? Why?
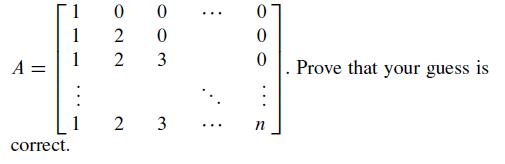
Repeat the strategy of Exercise 43 to guess the inverse ofData from in Exercise 43Use the algorithm from this section to find the inverses ofLet A be the corresponding n x n matrix, and let B be its inverse. Guess the form of B, and then prove that AB = I and BA = I. A = correct. 1 1 0 2 2 0 0 3 1
Explain why the columns of an n x n matrix A are linear independent when A is invertible.
Suppose P is invertible and A = PBP-¹. Solve for B interms of A.
Suppose the second column of B is all zeros. What can you say about the second column of AB?
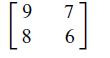
Find the inverses of the matrices if they exist. Use the algorithm introduced in this section. 9 8 7 6
If A, B, and C are n x n invertible matrices, does the equation C-¹(A + X)B-¹ = In have a solution, X? If so, find it.
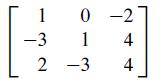
Find the inverses of the matrices if they exist. Use the algorithm introduced in this section. 10-2 1 -3 -3 2 4 4
Suppose the last column of AB is all zeros, but B itself has no column of zeros. What can you say about the columns of A?
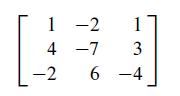
Find the inverses of the matrices if they exist. Use the algorithm introduced in this section. 1-2 -7 4 -2 3 6-4 ننا
Suppose CA = In (the n x n identity matrix). Show that the equation Ax = 0 has only the trivial solution. Explain why A cannot have more columns than rows.
Suppose A is n x n and the equation Ax = b has a solution for each b in Rn. Explain why A must be invertible.
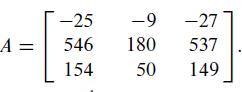
LetFind the second and third columns of A-1 without computing the first column. A = = -25 546 154 -9 180 50 -27 537 149
Suppose AD = Im (the m x m identity matrix). Show that for any b in Rm, the equation Ax = b has a solution.
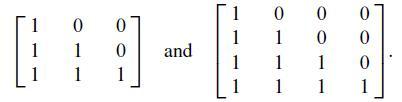
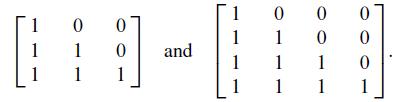
Use the algorithm from this section to find the inverses ofLet A be the corresponding n x n matrix, and let B be its inverse. Guess the form of B, and then prove that AB = I and BA = I. 1 0 0 1] 1 0 and 1 1 1 1 1 1 0 1 1 1 0 0 0 0 1 1 0 1
Suppose A is an m x n matrix and there exist n x m matrices C and D such that CA = In, and AD = Im. Prove that m = nand C = D.
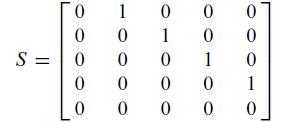
LetCompute Sk for k = 2, .... 6. 1 0 0 0 0 0 0 0 S = 0 0 00 1 0 0 1 0 0 0 0 0 0 1 0
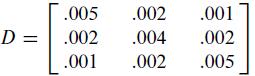
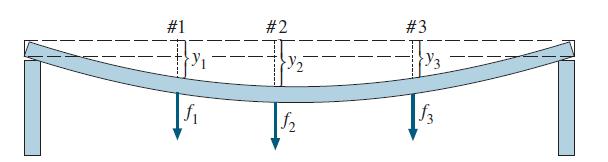
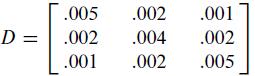
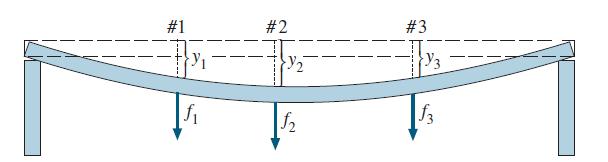
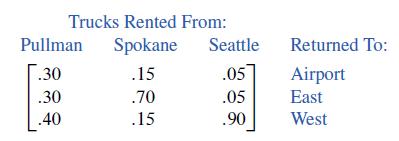
Letbe a flexibility matrix, with flexibility measured in inches per pound. Suppose that forces of 30, 50, and 20 lb are applied at points 1, 2, and 3, respectively, in Figure 1 of Example 3. Find the corresponding deflections.Data from in Figure 1 D = .005 .002 .001 .002 .004 .002 .001 .002 .005
Show that if ad - bc ≠ 0, the formula for A-¹ works.
Compute the stiffness matrix D-1 for D in Exercise 49. List the forces needed to produce a deflection of .04 in. at point 3, with zero deflections at the other points.Data from in Exercise 49Letbe a flexibility matrix, with flexibility measured in inches per pound. Suppose that forces of 30, 50,
LetFind the third column of A-1 without computing the other columns. A = -2 -7 -9 2 5 6 1 4 53 3
LetConstruct a 2 × 3 matrix C (by trial and error) using only l, - 1, and 0 as entries, such that CA = I2. Compute AC and note that AC ≠ I3. A || = 1 15
Suppose A is a 3 x n matrix whose columns span R³. Explain how to construct an n x 3 matrix D such that AD = I3.
Show that Im A = A when A is an m x n matrix. You can assume ImX = x for all x in Rm.
Describe in words what happens when you compute A5,A10, A20, and 430 for [1/6 A= 1/2 1/3 1/2 1/4 1/4 1/3 1/4 5/12
View vectors in Rn as n x 1 matrices. For u and v in Rn, the matrix product ut v is a 1 x 1 matrix, called the scalar product, or inner product, of u and v. It is usually written as a single real number without brackets. The matrix product uv is an n x n matrix, called the outer product of u and v.
LetConstruct a 4 × 2 matrix D using only 1 and 0 as entries, such that AD = I2. Is it possible that CA = I4 for some 4 × 2 matrix C? Why or why not? = [1 A = 1 0 1 1 0 1 11
Show that AIn = A when A is an m x n matrix.
Write the command(s) that will create a 6 × 4 matrix with random entries. In what range of numbers do the entries lie? Tell how to create a 3 x 3 matrix with random integer entries between -9 and 9.
Construct a random 4 x 4 matrix A and test whether (A + I) (A - 1) = A² - I. The best way to do this is to compute (A + 1)(A - 1) - (A² - I) and verify that this difference is the zero matrix. Do this for three random matrices. Then test (A + B)(A - B) = A² - B² the same way for three pairs of
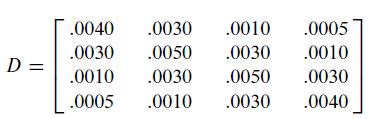
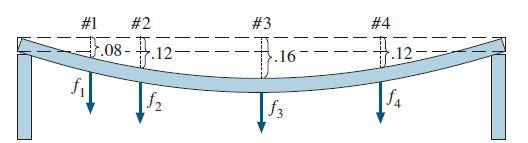
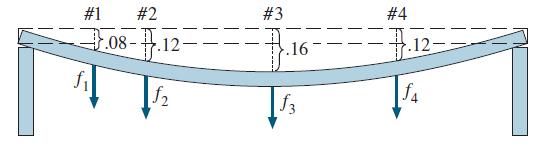
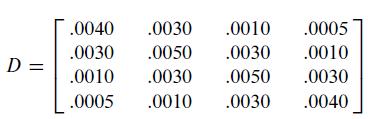
Letbe a flexibility matrix for an elastic beam with four points at which force is applied. Units are centimeters per newton of force. Measurements at the four points show deflections of .08, .12, .16, and .12 cm. Determine the forces at the four points. D = .0040 .0030 .0030 .0050 .0010 .0030 .0005
With D as in Exercise 51, determine the forces that produce a deflection of .24 cm at the second point on the beam, with zero deflections at the other three points. How is the answer related to the entries in D-1?Data from in Exercise 51Letbe a flexibility matrix for an elastic beam with four
LetFind the images under T of 2 A = [² 2]₁ 0 , and define T R2² R² by T(x) = Ax.
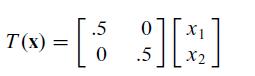
LetFind the images under T ofDefine A = .5 0 0 0 .5 0 0 0 .5 U = [] 0 and v= a b с
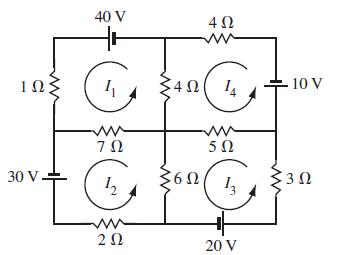
Write a matrix equation that determines the loop currents. If MATLAB or another matrix program is available, solve the system for the loop currents. UI 30 V. 40 V 1 ww UL 1, 2 Ω 4 Ω Σ4Ω 14 ΣΕΩ www 5Ω 1 20 V • 10 V 33Ω
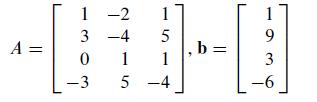
With T defined by T(x) = Ax, find a vector xwhose image under T is b, and determine whether x is unique. A 0-2 1 3-2 -5 1 -2 6, b: 7
With T defined by T(x) = Ax, find a vector x whose image under T is b, and determine whether x is unique. A = 1-3 2 0 1-4, b: 3-5 -9 || 6 -7 -9
With T defined by T(x) = Ax, find a vector x whose image under T is b, and determine whether x is unique. ¹ = [₁ A 1 -5 7 -3 -7 5 b
With T defined by T(x) = Ax, find a vector x whose image under T is b, and determine whether x is unique. A = 1-2 3-4 1 5 1 1 5 -4 0 -3 b = 9 3 -6
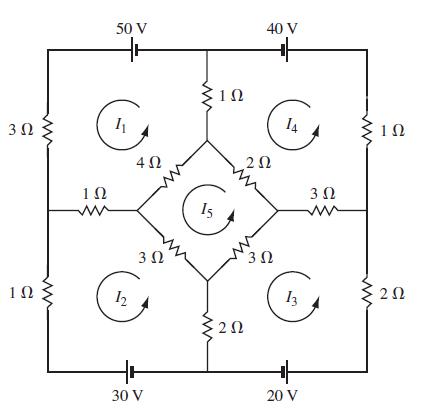
Write a matrix equation that determines the loop currents. If MATLAB or another matrix program is available, solve the system for the loop currents. 3 Ω ΤΩ 1Ω 50 V 1 12 4Ω 3 Ω 30 V 15 ΤΩ 2Ω ΖΩ '3Ω 40 V 14 13 20 V 3 Ω ww 1Ω ΖΩ
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R4, T(e₁) = (2, 1, 2, 1) and T(e₂) = (-5, 2, 0, 0),where e₁ = (1, 0) and e₂ = (0, 1).
Assume that T is a linear transformation. Find the standard matrix of T.T: R³ → R2, T(e₁) = (1, 3), T(e₂) = (4, 2), and T(e3) =(-5, 4), where e₁, e2, e3 are the columns of the 3 x 3 identity matrix.
Use a rectangular coordinate system to plotand their images under the given transformation T. (Make a separate and reasonably large sketch for each exercise.) Describe geometrically what T does to each vector x in R2. = n 5 2 {].V = [ V = -2 4
Letand let A be the matrix in Exercise 10. Is b in the range of the linear transformation x ↦ Ax? Why or why not?Data from in Exercise 10 b= -1 3 -1 4
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R² rotates points (about the origin) through 3π/2radians (in thecounterclockwisedirection).
Letand let A be the matrix in Exercise 9. Is b in the range of the linear transformation x ↦ Ax? Why or why not?Data from in Exercise 9 b = -1 1 0
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R² rotates points (about the origin) through -π/4 radians (since the number is negative, the actual rotation is clockwise).
College Moving Truck Rental has a fleet of 20, 100, and 200 trucks in Pullman, Spokane, and Seattle, respectively. A truck rented at one location may be returned to any of the three locations. The various fractions of trucks returned to the three locations each month are shown in the matrix below.
Use a rectangular coordinate system to plotand their images under the given transformation T. (Make a separate and reasonably large sketch for each exercise.) Describe geometrically what T does to each vector x in R2. = n 5 2 {].V = [ V = -2 4
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R² first rotates points through -3π/4 radians(since the number is negative, the actual rotation is clockwise)and then reflects points through the horizontal x₁-axis.
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R2 is a vertical shear transformation that maps e1 into e₁ - 2e2 but leaves the vector e2 unchanged.
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R² is a horizontal shear transformation that leaves e₁ unchanged and maps e₂ into e₂ + 5e₁.
Assume that T is a linear transformation. Find the standard matrix of T. T: R² → R² first reflects points through the vertical x2-axisand then reflects points through the line x₂ = x₁.
Use a rectangular coordinate system to plotand their images under the given transformation T . (Make a separate and reasonably large sketch for each exercise.) Describe geometrically what T does to each vector x in R2. = n 5 2 {].V = [ V = -2 4
Mark each statement True or False (T/ F). Justify each answer. (If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If A is an m n matrix and the equation Ax = b is consistent for some b, then
In a certain region, about 6% of a city’s population moves to the surrounding suburbs each year, and about 4% of the suburban population moves into the city. In 2020, there were 10,000,000 residents in the city and 800,000 in the suburbs. Set up a difference equation that describes this
Letand let T : R2 → R2 be a linear transformation that maps e1 into y1 and maps e2 into y2. Find the images of 2 e₁ = [b] ₂ = [i].³₁ = [3], and y₁ = [] €2 5
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R² first performs a horizontal shear that trans- forms e₂ into e₂ - 3e₁ (leaving e₁ unchanged) and then reflects points through the line x₂ = -X₁.
In a certain region, about 7% of a city’s population moves to the surrounding suburbs each year, and about 5% of the suburban population moves into the city. In 2020, there were 800,000 residents in the city and 500,000 in the suburbs. Set up a difference equation that describes this situation,
Mark each statement True or False (T/ F). Justify each answer. (If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If an augmented matrix [A b] can be transformed by elementary row operations
Assume that T is a linear transformation. Find the standard matrix of T.T: R² → R² first reflects points through the vertical x2-axisand then rotates points 3π/2 radians.
Use a rectangular coordinate system to plotand their images under the given transformation T. (Make a separate and reasonably large sketch for each exercise.) Describe geometrically what T does to each vector x in R2. = n 5 2 {].V = [ V = -2 4
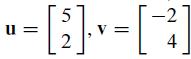
Let T : R2 → R2 be a linear transformation that mapsUse the fact that T is linear to find the images under T of 5u, 4v, and 5u + 4v. U= 2 into 3 4 and maps 2 1 -5 into [_
Show that T is a linear transformation by finding a matrix that implements the mapping. Note that x1, x2, ... are not vectors but are entries in vectors. T(X1, X2, X3, X4) = 2x₁ + 3x3 - 4x4 (T: R¹ → R)
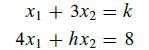
Determine h and k such that the solution set of the system (i) is empty, (ii) contains a unique solution, and (iii) contains infinitely many solutions.(a)(b) x₁ + 3x₂ = k 4x₁ + hx₂ = 8
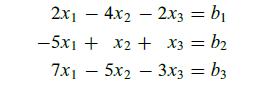
Consider the problem of determining whether the following system of equations is consistent for all b1, b2, b3:a. Define appropriate vectors, and restate the problem in terms of Span {v1, v2, v3}. Then solve that problem.b. Define an appropriate matrix, and restate the problem using the phrase
Show that T is a linear transformation by finding a matrix that implements the mapping. Note that x1, x2, ...are not vectors but are entries in vectors.T (x1, x2, x3) = (x1 - 5x2 + 4x3, x2 - 6x3)
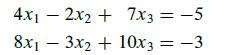
Consider the problem of determining whether the following system of equations is consistent:a. Define appropriate vectors, and restate the problem in terms of linear combinations. Then solve that problem.b. Define an appropriate matrix, and restate the problem using the phrase “columns of A.”c.
Mark each statement True or False (T/ F). Justify each answer. (If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If {u, v, w} is linearly independent, then u, v, and w are not in R².
Mark each statement True or False (T/ F). Justify each answer. (If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) In some cases, it is possible for four vectors to span R5.
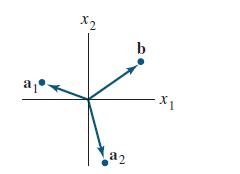
Let a₁, a2, and b be the vectors in R² shown in the figure, and let A = [a₁ a₂]. Does the equation Ax = b have a solution? If so, is the solution unique? Explain. x2 a2 b X1
Let T: R² → R³ be a linear transformation such thatT(x₁, x₂) = (x₁ - 2x2, -x1 + 3x2, 3x1 - 2x2). Find x suchthat T(x)= (-1, 4, 9).
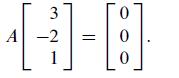
Write the reduced echelon form of a 3 x 3 matrix A such that the first two columns of A are pivot columns and 3 A -2 1 - [8] 0 0
Mark each statement True or False (T/ F). Justify each answer. (If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If u, v, and w are nonzero vectors in R2, then w is a linear combination of u and
Mark each statement True or False (T/ F). Justify each answer. (If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If w is a linear combination of u and v in Rn, then u is a linear combination of v
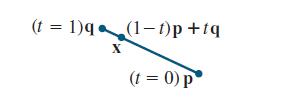
a. Show that the line through vectors p and q in R" may be written in the parametric form x = (1 - 1)p + tq. b. The line segment from p to q is the set of points of the form (1- t)p + tq for 0 ≤ t ≤ 1 (as shown in the figure below). Show that a linear transformation T maps this line segment
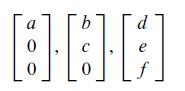
In (a) and (b), suppose the vectors are linearly independent. What can you say about the numbers a, .... f? Justify your answers.(a)(b) D [0] P
Showing 1900 - 2000
of 2241
First
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Step by Step Answers