New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
linear algebra and its applications
Linear Algebra And Its Applications 6th Global Edition David Lay, Steven Lay, Judi McDonald - Solutions
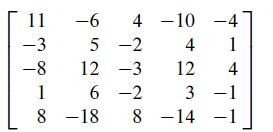
Diagonalize the matrices. Use your matrix program’s eigenvalue command to find the eigenvalues, and then compute bases for the eigenspaces. 11 -3 -8 1 -6 4 5-2 12 -3 6-2 -10 4 12 1 4 3-1 8-18 8 -14 -1
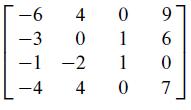
Diagonalize the matrices. Use your matrix program’s eigenvalue command to find the eigenvalues, and then compute bases for the eigenspaces. -6 -3 -1 -2 4 0 1 1 -4 4 0 |- 0 9 6 0 7
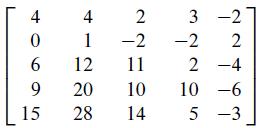
Diagonalize the matrices. Use your matrix program’s eigenvalue command to find the eigenvalues, and then compute bases for the eigenspaces. 4 0 6 9 15 4 1 12 20 28 2 -2 11 10 14 3-2 2 2-4 10 -6 5 -3 -2
The shift transformation, S.({yk}) = {yk-1}, shifts each entry in the signal one position to the right. The moving average transformation,creates a new signal by averaging two consecutive terms in the given signal. The constant signal of all ones is given by χ = {1k} and the alternating signal by
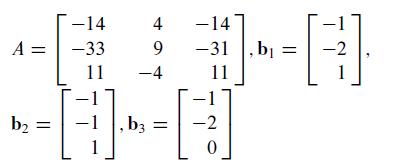
Find the B-matrix for the transformation x → Ax when B = {b1, b2, b3}. A || b₂ = -14 -33 11 G]- 4 9 -4 ,b3 = -14 -31 11 -2 0 , b₁ = []}
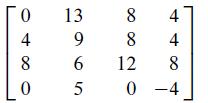
Diagonalize the matrices. Use your matrix program’s eigenvalue command to find the eigenvalues, and then compute bases for the eigenspaces. 0 4 8 0 13 965 6 ∞∞ 8 4 4 8 0-4 8 12
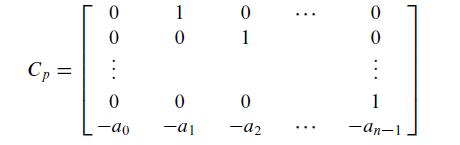
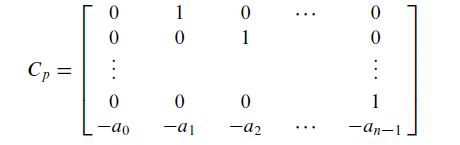
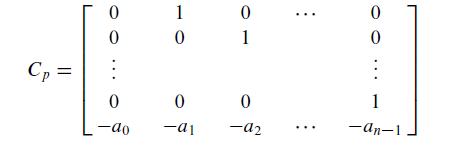
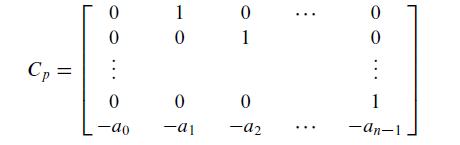
Concern the polynomialand an n × n matrix Cp called the companion matrix of p:Write the companion matrix Cp for p(t) = a0 + a1t + t2, then find the characteristic polynomial of Cp. p(t)= ao + a₁t +...+ an-1t"-1 +t"
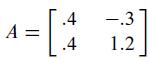
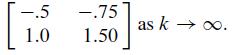
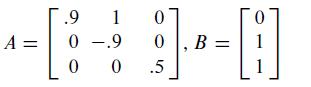
LetExplain why Ak approaches A = .4 .4 -.3 1.2
Concern the polynomialand an n × n matrix Cp called the companion matrix of p:Let p(t) = 2t - 3t2 + t3. Write the companion matrix for p(t) and use techniques to find its characteristic polynomial and its eigenvalues. p(t)= ao + a₁t +...+ an-1t"-1 +t"
Concern the polynomialand an n × n matrix Cp called the companion matrix of p:Let p(t) = a0 + a1t + a2t2 + t3, and let be a zero of p. a. Write the companion matrix for p. b. Explain why λ3 = a0 - a1λ - a2λ2, and show that (1, λ, λ2) is an eigenvector of the companion matrix for p.
With A and D as in Example 2, find an invertible P2 unequal to the P in Example 2, such that A = P2DP2-1.Data from in Example 2 7 -[41] EXAMPLE 2 Let A = where P Find a formula for Ak, given that A = PDP-1, -[44] -2 = and D = - 50 0 3
Concern the polynomialand an n × n matrix Cp called the companion matrix of p:Use mathematical induction to prove that for n ≥ 2, p(t)= ao + a₁t +...+ an-1t"-1 +t"
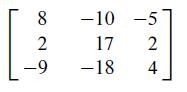
Use a matrix program to find the eigenvalues of the matrix. Then use the method of Example 4 with a row reduction routine to produce a basis for each eigenspace.Data from in Example 4 8 -10 -5 17 2 NØ 2 -9 -18 524
Construct a random integer-valued 4 × 4 matrix A, and verify that A and AT have the same characteristic polynomial (the same eigenvalues with the same multiplicities). Do A and AT have the same eigenvectors? Make the same analysis of a 5 × 5 matrix. Report the matrices and your conclusions.
Construct a random integer valued 4 x 4 matrix A. a. Reduce A to echelon form U with no row scaling, and compute det A. (If A happens to be singular, start over with a new random matrix.) b. Compute the eigenvalues of A and the product of the se eigenvalues (as accurately as
Consider an n × n matrix A with the property that the row sums all equal the same number s. Show that s is an eigen value of A.
Consider an n × n matrix A with the property that the column sums all equal the same number s. Show that s is an eigenvalue of A.
a. Let A be a diagonalizable n × n matrix. Show that if the multiplicity of an eigenvalue λ is n, then A = λI.b. Use part (a) to show that the matrixis not diagonalizable. A = 2 1 0 0 2 1 0 0 2
The shift transformation, S.({yk}) = {yk-1}, shifts each entry in the signal one position to the right. The moving average transformation,creates a new signal by averaging two consecutive terms in the given signal. The constant signal of all ones is given by χ = {1k} and the alternating signal by
The shift transformation, S.({yk}) = {yk-1}, shifts each entry in the signal one position to the right. The moving average transformation,creates a new signal by averaging two consecutive terms in the given signal. The constant signal of all ones is given by χ = {1k} and the alternating signal by
A widely used method for estimating eigenvalues of a general matrix A is the QR algorithm. Under suitable conditions, this algorithm produces a sequence of matrices, all similar to A, that become almost upper triangular, with diagonal entries that approach the eigenvalues of A. The main idea is to
A and B are n × n matrices. Justify each answer.(T/F) The matrix A can have more than n eigenvalues.
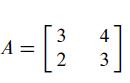
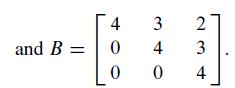
a. Verify teh Cayley–Hamilton theorem forb. Use part (a) to express A2, A3 and A-1 as linear combinations of A and I. A = 3 4 2 3
A is an n × n matrix. Justify each answer.(T/F) If v1 and v2 are linearly independent eigenvectors, then they correspond to distinct eigenvalues.
A is an n × n matrix. Justify each answer.(T/F) If v is an eigenvector with eigenvalue 2, then 2v is an eigenvector with eigenvalue 4.
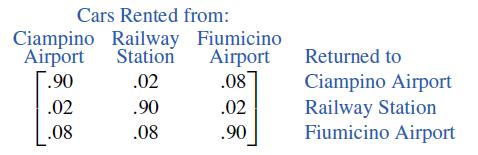
In Rome, Europcar Rent A Car has a fleet of about 2500 cars. The pattern of rental and return locations is given by the fractions in the table below. On a typical day, about how many cars will be rented or ready to rent from the Fiumicino Airport? Cars Rented from: Ciampino Railway
Show that every eigenvalue of such a matrix is necessarily real.Let A be an n × n real matrix with the property that AT = A, let x be any vector in Cn, and let q = X̅T Ax. The equalities below show that q is a real number by verifying that q̅ = q. Give a reason for each step. q = x Ax = x¹Ax =
A and B are n × n matrices. Justify each answer.(T/F) The eigenvalue of the n × n identity matrix is 1 with algebraic multiplicity n.
Verify the statements by providing justification for each statement. In each case, the matrices are square.If B = P-1 AP and x is an eigenvector of A corresponding to an eigenvalue λ, then P-1 x is an eigenvector of B corresponding also to λ.
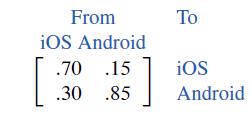
Suppose the following matrix describes the likelihood that an individual will switch between an iOS and an Android smartphone:In the long run, what percentage of smartphone owners would you expect to have an Android operating system? From iOS Android .15 .70 .30 {] .85 To iOS Android
A and B are n × n matrices. Justify each answer.(T/F) The multiplicity of a root r of the characteristic equation of A is called the algebraic multiplicity of r as an eigenvalue of A.
A and B are n × n matrices. Justify each answer.(T/F) If two matrices have the same set of eigenvalues, then they are similar.
Isa steady state vector forJustify your answer. q [3/7 4/7
A and B are n × n matrices. Justify each answer.(T/F) If λ + 5 is a factor of the characteristic polynomial of A, then 5 is an eigenvalue of A.
A is an n × n matrix. Justify each answer.(T/F) Finding an eigenvector of A may be difficult, but checking whether a given vector is in fact an eigenvector is easy.
A is an n × n matrix. Justify each answer.(T/F) To find the eigenvalues of A, reduce A to echelon form.
A and B are n × n matrices. Justify each answer.(T/F) If 2 is an eigenvalue of A, then A - 2I is not invertible.
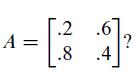
Isa steady state vector forJustify your answer. b .6 .4
A is a 2 × 2 matrix with real entries, and x is a vector in R2. Justify each answer.(T/F) If the matrix A has two complex eigenvalues, then it also has two linearly independent real eigenvectors.
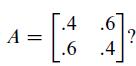
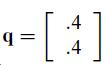
Isa steady state vector forJustify your answer. q .4 .4
A and B are n × n matrices. Justify each answer.(T/F) The matrix A and its transpose, AT, have different sets of eigenvalues.
A is a 2 × 2 matrix with real entries, and x is a vector in R2. Justify each answer.(T/F) The matrix A always has two eigenvalues, but sometimes they have algebraic multiplicity 2 or are complex numbers.
Diagonalize the matrices, if possible. The eigenvalues are as follows: (11) λ = 1, 2, 3; (12)λ = 1, 4; (13)λ = 5, 1; (14)λ = 3, 4; (15)λ = 3, 1; (16)λ = 2, 1. 2000 0200 0020 1002
A is an n × n matrix. Justify each answer.(T/F) A matrix A is invertible if and only if 0 is an eigenvalue of A.
Verify the statements by providing justification for each statement. In each case, the matrices are square.If A is diagonalizable and B is similar to A, then B is also diagonalizable.
Justify each answer. (T/F) An n × n matrix with n linearly independent eigenvectors is invertible.
A and B are n × n matrices. Justify each answer.(T/F) The matrices A and B-1 AB have the same sets of eigenvalues for every invertible matrix B.
Isa steady state vector for Justify your answer. b .6 .8
A is a 2 × 2 matrix with real entries, and x is a vector in R2. Justify each answer.(T/F) The points Ax, A2 x, A3 x, ..... always lie on the same circle.
A is a 2 × 2 matrix with real entries, and x is a vector in R2. Justify each answer.(T/F) The matrix A can have one real and one complex eigenvalue.
A and B are n × n matrices. Justify each answer.(T/F) The zero vector is in the eigenspace of A associated with an eigenvalue λ.
Justify your answer. (T/F) If A and B are invertible n × n matrices, then AB is similar to BA.
Justify each answer. (T/F) If A is ∊ similar to a diagonalizable matrix B, then A is also diagonalizable.
Let A be a complex (or real) n × n matrix, and let x in Cn be an eigenvector corresponding to an eigenvalue λ in C. Show that for each nonzero complex scalar μ, the vector μx is an eigenvector of A.
Verify the statements by providing justification for each statement. In each case, the matrices are square.If A is invertible and similar to B, then B is invertible and A-1 is similar to B-1.
Justify each answer.(T/F) If there is a nonzero vector in the kernel of a linear transformation T, then 0 is an eigenvalue of T.
Find (a) The largest eigenvalue (b) The eigenvalue closest to zero. In each case, set x0 = (1,0,0,0) and carry out approximations until the approximating sequence seems accurate to four decimal places. Include the approximate eigenvector. A = 1 2 -2 4 2 3 12 13 3 5 0 7 2 11 2 2
Find an invertible matrix P and a matrix a C of the form such that the given matrix has the b a form A = PCP-1. D b -b a
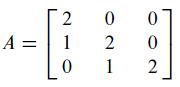
For find one eigenvalue, with no calculation. Justify your answer. A = 2 2 3 333 1 12 3 3
Use a property of determinants to show that A and AT have the same characteristic polynomial.
P is an n × n stochastic matrix. Justify each answer.(T/F) All stochastic matrices are regular.
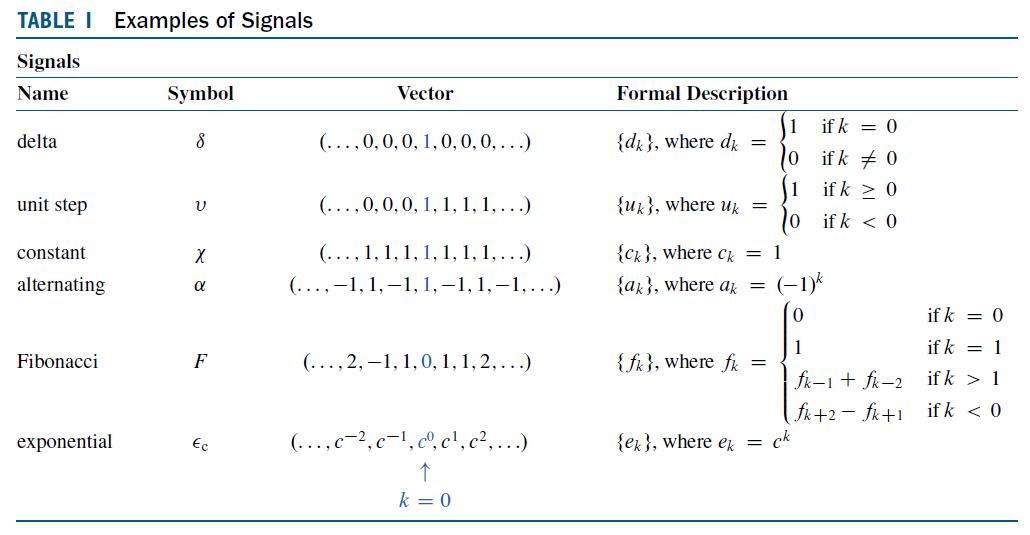
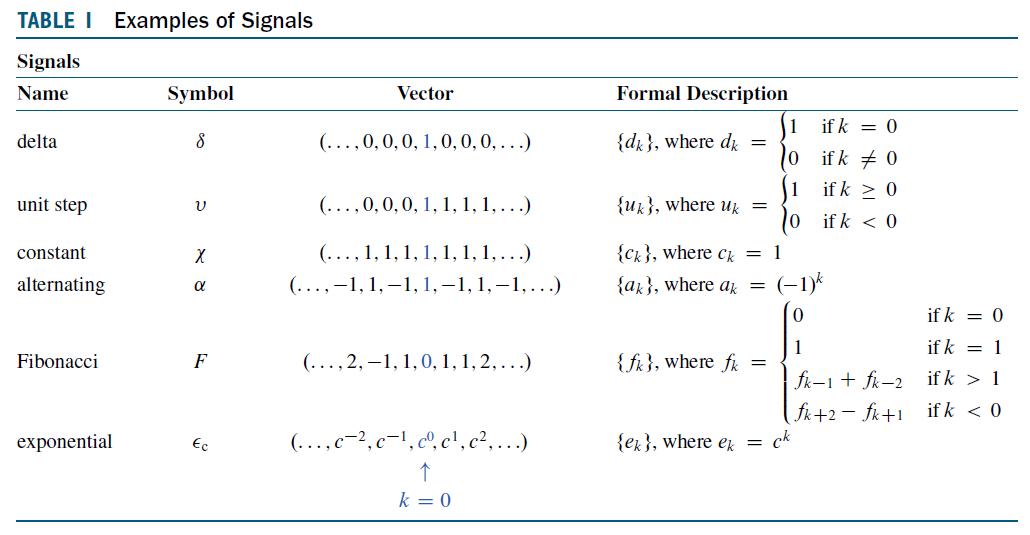
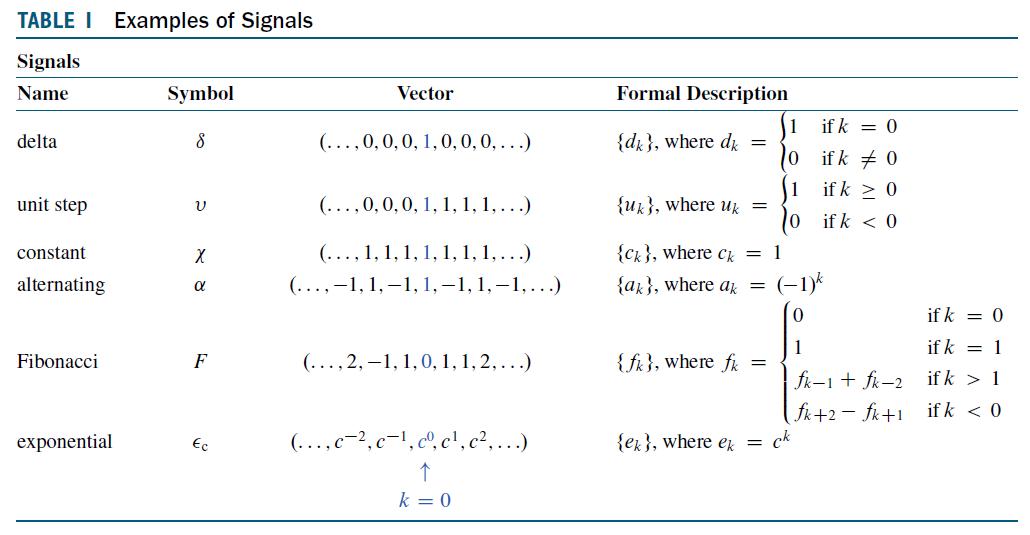
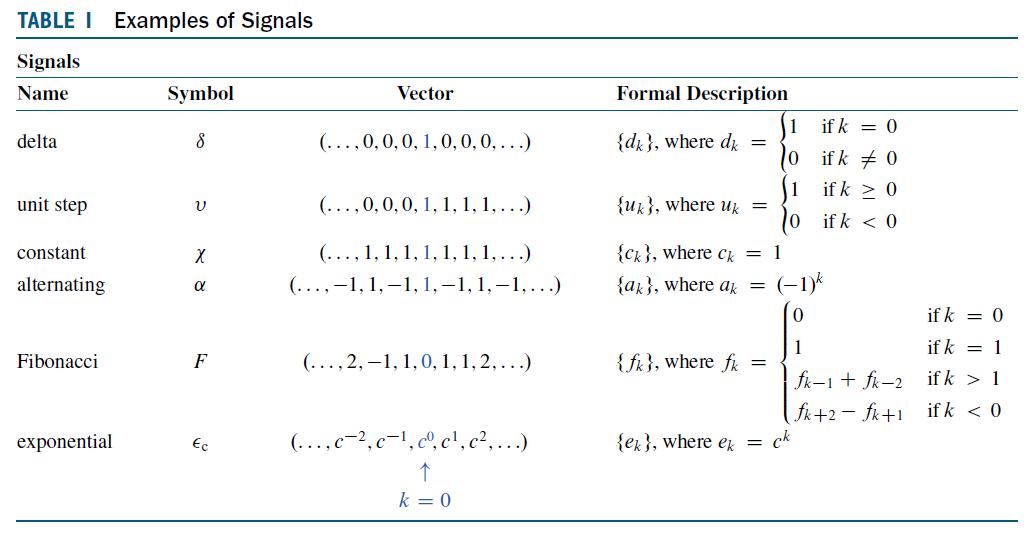
Find the indicated sums of the signals in Table 1.v + 2αData from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0, 0, 1, 1, 1, 1, ...) (..., 1, 1, 1, 1, 1, 1, 1,
Show that the signals form a basis for the solution set of the accompanying difference equation.The signals and equation in Exercise 1Data from in Exercise 1The signals are solutions of the accompanying difference equation. 2, (-4); yk+2+ 2yk+1-8yk = 0
Find the indicated sums of the signals in Table 1.χ + αData from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0, 0, 1, 1, 1, 1, ...) (..., 1, 1, 1, 1, 1, 1, 1,
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.)v1,...,vp are vectors in a nonzero finite-dimensional vector space V, and S = {v1,...,vp}.(T/F) The set of all linear combinations of v1,...,vp is a
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.)v1,...,vp are vectors in a nonzero finite-dimensional vector space V, and S = {v1,...,vp}.(T/F) If {v1,...,vp -1} spans V, then S spans V.
Find the indicated sums of the signals in Table 1.v _ 3αData from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0, 0, 1, 1, 1, 1, ...) (..., 1, 1, 1, 1, 1, 1, 1, ...)
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.)v1,...,vp are vectors in a nonzero finite-dimensional vector space V, and S = {v1,...,vp}.(T/F) If {v1,...,vp -1} is linearly independent, then so
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.)v1,...,vp are vectors in a nonzero finite-dimensional vector space V, and S = {v1,...,vp}.(T/F) If S is linearly independent, then S is a basis for V.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If an m x n matrix A is row equivalent to an echelon matrix U and if U has k nonzero rows, then the dimension of the solution space of Ax = 0 is m
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) The nonpivot columns of a matrix are always linearly dependent.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) A plane in R3 is a two-dimensional subspace.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.)v1,...,vp are vectors in a nonzero finite-dimensional vector space V, and S = {v1,...,vp}.(T/F) If dim V = p and Span S = V, then S cannot be linearly
Recall that I({xk})= {xk} and S({xk}) = {Xk-1}.Which signals from Table 1 are in the kernel of I + S?Data from in Table 1 TABLE I Examples of Signals Signals Name delta unit step constant alternating Fibonacci exponential Symbol 8 V X α F Ec Vector (..., 0, 0, 0, 1, 0, 0, 0, ...) (..., 0, 0, 0, 1,
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.)v1,...,vp are vectors in a nonzero finite-dimensional vector space V, and S = {v1,...,vp}.(T/F) If Span S = V, then some subset of S is a basis for V.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) Row operations on a matrix can change the null space.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) The rank of a matrix equals the number of nonzero rows.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If B is obtained from a matrix A by several elementary row operations, then rank B = rank A.
Show that if P is an invertible m x m matrix, then rank PA = rank A.
Find a nonzero signal in the range of M3 from Exercise 10.Data from in Exercise 10Show thatis a linear time invariant transformation. (²x + 1-2x + 7-1x) = { = ({x}) {W 3 {(x₂
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If A is m x n and rank A = m, then the linear transformation x ↦ Ax is one-to-one.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If H is a subspace of R3, then there is a 3 x 3 matrix A such that H = Col A.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If matrices A and B have the same reduced echelon form, then Row A = Row B.
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) The nonzero rows of a matrix A form a basis for Row A.
If A is an m x n matrix of rank r, then a rank factorization of A is an equation of the form A = CR, where C is an m x r matrix of rank r and R is an r x n matrix of rank r. Show that such a factorization always exists. Then show that given any two m x n matrices A and B. rank(A + B) ≤ rank A +
Suppose A is a 4 x 4 matrix and B is a 4 x 2 matrix, and let u0,...,u3 represent a sequence of input vectors in R2. a. Set x0 = 0, compute X1,..., X4 from equation (1), and write a formula for x4 involving the controllability matrix M appearing in equation (2).Data from in Equation (1) &
Determine if the matrix pairs are controllable. A = .9 1 0.9 0 0 0 0 .5 , B = 8 1
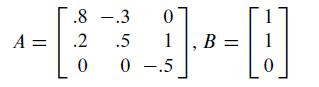
Determine if the matrix pairs are controllable. A = .8.3 .2 .5 0 0 {]- -[J] 1 B = 1 0.5
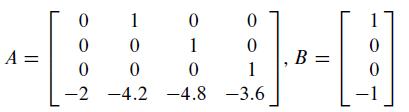
Determine if the matrix pairs are controllable. A = 1 0 0 0 0 -2 -4.2 0 1 0 -4.8 0 1 -3.6 B =
If true, cite appropriate facts or theorems. If false, explain why or give a counterexample that shows why the statement is not true in every case.(T/F) If A is m x n and the linear transformation x ↦ Ax is onto, then rank A = m.
Show that if Q is an invertible n x n matrix, then rank AQ = rank A.
Develop properties of rank that are sometimes needed in applications. Assume the matrix A is m × n.Show from parts (a) and (b) that rank AB cannot exceed the rank of A or the rank of B. (In general, the rank of a product of matrices cannot exceed the rank of any factor in the product.) a.
Let S be a finite minimal spanning set of a vector space V. That is, S has the property that if a vector is removed from S, then the new set will no longer span V. Prove that S must be a basis for V.
Let S be a maximal linearly independent subset of a vector space V. That is, S has the property that if a vector not in S is adjoined to S, then the new set will no longer be linearly independent. Prove that S must be a basis for V.
Let T: Rn → Rn be a linear transformation. a. What is the dimension of the range of T if T is a one-to- one mapping? Explain. b. What is the dimension of the kernel of T if T maps Rn onto Rm? Explain.
Let H be an n-dimensional subspace of an n-dimensional vector space V. Explain why H = V.
What would you have to know about the solution set of a homogeneous system of 23 linear equations in 25 variables in order to know that every associated nonhomogeneous equation has a solution? Discuss.
Suppose P1, P2, P3, and p4 are specific polynomials that span a two-dimensional subspace H of P5. Describe how one can find a basis for H by examining the four polynomials and making almost no computations.
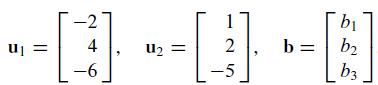
Letand W = Span {u1, u2}. Find an implicit description of W; that is, find a set of one or more homogeneous equations that characterize the points of W. U₁ = -2 4 -6 112 = 1 2 -5 b= b₁ b₂ b3
Consider the polynomials p1(t) = 1 + t, P2 (t) =1 - t P3(t) = 4 P4(t) = t + t2, P5 (t) = 1 + 2t + t2. and let H be the subspace of P5 spanned by the set S = {P1, P2, P3, P4, P5). Use the method described in the proof of the Spanning Set Theorem to produce a basis for H. (Explain how to select
Showing 1100 - 1200
of 2241
First
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Last
Step by Step Answers