New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
linear algebra and its applications
Linear Algebra And Its Applications 6th Global Edition David Lay, Steven Lay, Judi McDonald - Solutions
Suppose Find a matrix A such that the transformation x ↦ Ax mapsFind A. AB [²8] and B =[23] 7 6
Mark each statement Ture or False (T/F). Justify each answer.(T/F) A subset H of Rn is a subspace if the zero vector is in H.
Mark each statement True or False (T/F). Justify each answer. Here A is an m x n matrix.(T/F) The dimension of Nul A is the number of variables in the equation Ax = 0.
Mark each statement Ture or False (T/F). Justify each answer.(T/F) A subset H of Rn is a subspace if the zero vector is in H.
Mark each statement True or False (T/F). Justify each answer. Here A is an m x n matrix.(T/F) The dimensions of Col A and Nul A add up to the number of columns of A.
Mark each statement Ture or False (T/F). Justify each answer.(T/F) Given vectors V1,......,Vp in Rn, the set of all linear combinations of these vectors is a subspace of Rn.
Mark each statement Ture or False (T/F). Justify each answer.(T/F) Row operations do not affect linear dependence relations among the columns of a matrix.
What is the rank of a 3 x 7 matrix whose null space is three-dimensional?
Suppose C = E3E2E1B, where E1, E2, and E3 are elementary matrices. Explain why C is row equivalent to B.
Determine which sets are bases for R2 or R3. Justify each answer. 0 5 DHO 1 -7 3 -2 4 6 5
Determine which sets are bases for R2 or R3. Justify each answer. -2 -5 - 1 2 7 -5
A square matrix A is nilpotent of index k if Aj ≠ 0 for j = 1,...,k - 1 and Ak = 0. Show thatare nilpotent and determine their index. A = 1 1 0 -1 -0 0 0 0 ] 0 and B = 0 0 0 1 0 0 230
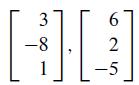
Determine which sets are bases for R2 or R3. Justify each answer. 3 -8 1 6 2 -5
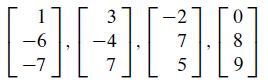
Determine which sets are bases for R2 or R3. Justify each answer. 3 CICH -4 7 7 5
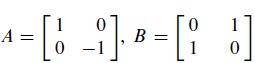
LetThese are Pauli spin matrices used in the study of electron spin in quantum mechanics. Show that A2 = I, B2 = I, and AB = -BA. Matrices such that AB = - BA are said to anticommute. A 0 - [i]. B -[i 1 1 0
Suppose An = 0 for n = 3. Use matrix algebra to compute (I - A)(I + A + A2) and (I + A)(I - A + A2) and show that both I - A and I + A are invertible.
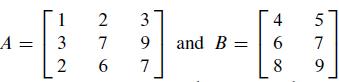
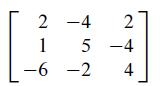
LetCompute A-1 B without computing A-1. A 1 3 2 2 7 6 3 9 7 and B = 4 6 8 5 7 9
Mark each statement True or False (T/F). Justify each answer. Here A is an m x n matrix.(T/F) If B is a basis for a subspace H, then each vector in H can be written in only one way as a linear combination of the vectors in B.
Suppose an n x n matrix A satisfies the equation A2 - 2A + 1 = 0. Show that A3 = 3A - 21 and A4 = 4A - 3I.
Mark each statement True or False (T/F). Justify each answer. Here A is an m × n matrix.(T/F) Each line in Rn is a one-dimensional subspace of Rn.
Mark each statement True or False (T/F). Justify each answer. Here A is an m x n matrix.(T/F) If B = {v1,..., Vp} is a basis for a subspace H of Rn, then the correspondence x ↦ [x]B makes H look and act the same as RP.
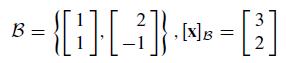
Find the vector x determined by the given coordinate vector [x]B and the given basis B. B = {]-[-3) -N = [3] [X] B 2
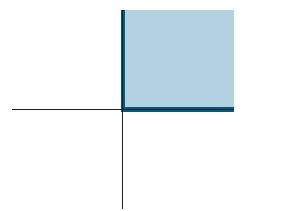
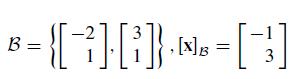
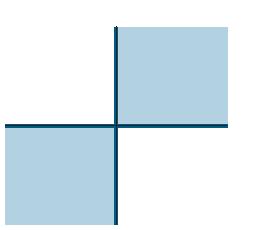
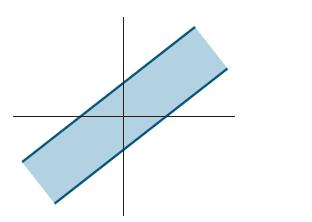
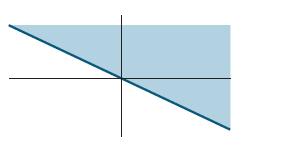
Display sets in R2. Assume the sets include the bounding lines. In each case, give a specific reason why the set H is not a subspace of R2. (For instance, find two vectors in H whose sum is not in H, or find a vector in H with a scalar multiple that is not in H. Draw a picture.)
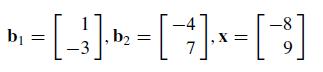
The vector x is in a subspace H with a basis B = {b1,b2}. Find the B-coordinate vector of x. b₁ = [4] = [7³] x [²] b₂ X = 7
Find the vector x determined by the given coordinate vector [x]B and the given basis B. B={}]]-[-]
Display sets in R2. Assume the sets include the bounding lines. In each case, give a specific reason why the set H is not a subspace of R2. (For instance, find two vectors in H whose sum is not in H, or find a vector in H with a scalar multiple that is not in H. Draw a picture.)
Display sets in R2. Assume the sets include the bounding lines. In each case, give a specific reason why the set H is not a subspace of R2. (For instance, find two vectors in H whose sum is not in H, or find a vector in H with a scalar multiple that is not in H. Draw a picture.)
Display sets in R2. Assume the sets include the bounding lines. In each case, give a specific reason why the set H is not a subspace of R2. (For instance, find two vectors in H whose sum is not in H, or find a vector in H with a scalar multiple that is not in H. Draw a picture.)
The vector x is in a subspace H with a basis B = {b1,b2}. Find the B-coordinate vector of x. [-]-[-]-[F] - 4
Assume that the matrices mentioned below have appropriate sizes. Mark each statement True or False (T/F). Justify each answer.(T/F) If A and B are m x n, then both ABT and ATB are defined.
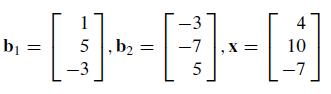
The vector x is in a subspace H with a basis B = {b1,b2}. Find the B-coordinate vector of x. -3 ------H -7 X = 10 5 b₁ 1 -3 4 -7
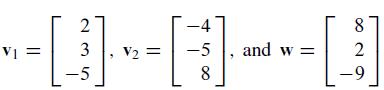
LetDetermine if w is in the subspace of R3 generated by v1 and v2. VI V₁ = 2 3 -5 V₂ = -4 -5 58 8 and w= 8 2 -9
Assume that the matrices mentioned below have appropriate sizes. Mark each statement True or False (T/F). Justify each answer.(T/F) If AB = C and C has 2 columns, then A has 2 columns.
Assume that the matrices mentioned below have appropriate sizes. Mark each statement True or False (T/F). Justify each answer.(T/F) Left-multiplying a matrix B by a diagonal matrix A, with nonzero entries on the diagonal, scales the rows of B.
Assume that the matrices mentioned below have appropriate sizes. Mark each statement True or False (T/F). Justify each answer.(T/F) If AC = 0, then either A = 0 or C = 0.
Assume that the matrices mentioned below have appropriate sizes. Mark each statement True or False (T/F). Justify each answer.(T/F) If BC = BD, then C = D.
Refer to an economy that is divided into three sectors—manufacturing, agriculture, and services. For each unit of output, manufacturing requires .10 unit from other companies in that sector, .30 unit from agriculture, and .30 unit from services. For each unit of output, agriculture uses .20 unit
When A is invertible, MATLAB finds A-1 by factoring A = LU (where I may be permuted lower triangular), inverting L and U, and then computing U-¹L-¹. Use this method tocompute the inverse of A in Exercise 2.Data from in Exercise 2Solve the equation Ax = b by using the LU factorization given for A.
Let A = LU be an LU factorization. Explain why A can be row reduced to U using only replacement operations.
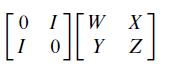
Assume that the matrices are partitioned conformably for block multiplication. Compute the products shown below. [J][ 0 I W I 0 Y X Z
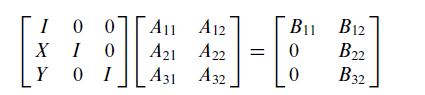
Suppose A11 is an invertible matrix. Find matrices X and Y such that the product below has the form indicated. Also, compute B22. 0 I 0 XI 0 YO I A11 A12 A21 A22 A31 A32 - [8 0 0 B11 B12 B22 B32
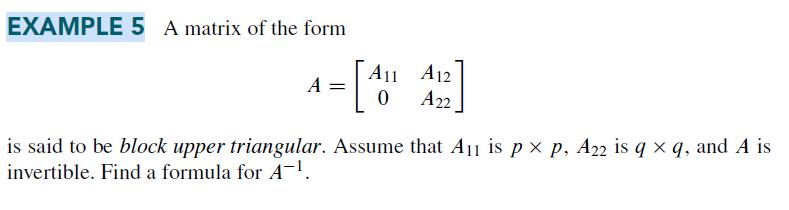
Show that the block upper triangular matrix A in Example 5 is invertible if and only if both A11 and A22 are invertible.Data from in Example 5 EXAMPLE 5 A matrix of the form A = [₁ A11 A12 0 A22 is said to be block upper triangular. Assume that A₁ is px p, A22 is q xq, and A is invertible.
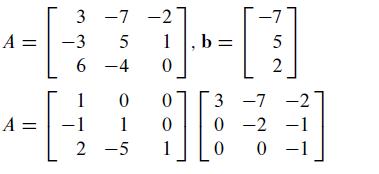
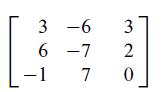
Solve the equation Ax = b by using the LUfactorization given for A. Also solve Ax = bby ordinary row reduction. A = A = 3-7 -3 5 6-4 1 0 1 2-5 -1 - 1, b = 0 0 8][8 0 1 0 0-1 3 -7 5 2 0-2 -2 -
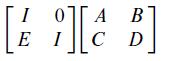
Assume that the matrices are partitioned conformably for block multiplication. Compute the products shown below. [ ?][a 1 ΕΙ B C D
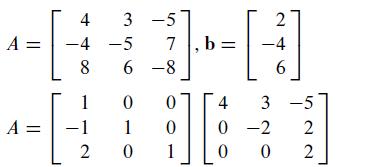
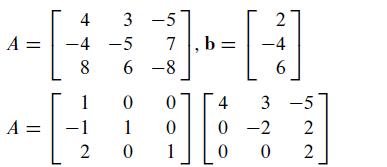
Solve the equation Ax = b by using the LU factorization given for A. Also solve Ax = b by ordinary row reduction. A = A = 4 -4 8 1 -1 2 3-5 7 6-8 -5 0 0 10 0 1 b= 2 -4 6 4 3-5 0-2 2 00 2
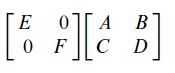
Assume that the matrices are partitioned conformably for block multiplication. Compute the products shown below. E A [ 5 ][B] 0 F C D
Refer to an economy that is divided into three sectors—manufacturing, agriculture, and services. For each unit of output, manufacturing requires .10 unit from other companies in that sector, .30 unit from agriculture, and .30 unit from services. For each unit of output, agriculture uses .20 unit
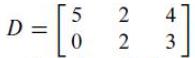
Use matrix multiplication to find the image of the triangle with data matrix under the transformation that reflects points through the y-axis. Sketch both the original triangle and its image. D = 5 0 2 2 4 3
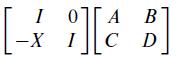
Assume that the matrices are partitioned conformably for block multiplication. Compute the products shown below. 0 ¡][ I -X I A C B D
Refer to an economy that is divided into three sectors—manufacturing, agriculture, and services. For each unit of output, manufacturing requires .10 unit from other companies in that sector, .30 unit from agriculture, and .30 unit from services. For each unit of output, agriculture uses .20 unit
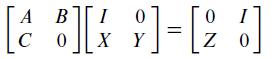
Assume that the matrices are partitioned conformably for block multiplication. Find formulas for X, Y, and Z in terms of A, B, and C, and justify your calculations. In some cases, you may need to make assumptions about the size of a matrix in order to produce a formula. [8][9]-[23] C 0 X Y A B 0
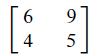
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 6 4 9 5
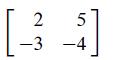
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 2 5 -3 -4
Consider the production model x = Cx + d for an economy with two sectors, whereUse an inverse matrix to determine the production level necessary to satisfy the final demand. C .0 .5 .6 .2 d= 50 30
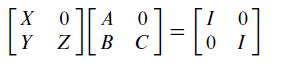
Assume that the matrices are partitioned conformably for block multiplication. Find formulas for X, Y, and Z in terms of A, B, and C, and justify your calculations. In some cases, you may need to make assumptions about the size of a matrix in order to produce a formula. X 0 A 0 I [2][2] = [6] Y Z B
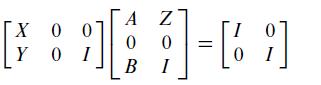
Assume that the matrices are partitioned conformably for block multiplication. Find formulas for X, Y, and Z in terms of A, B, and C, and justify your calculations. In some cases, you may need to make assumptions about the size of a matrix in order to produce a formula. A Z X 0 0 [:[]=[] 0 0 Y 0
Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Translate by (3, 1), and then rotate 45° about the origin.
Assume that the matrices are partitioned conformably for block multiplication. Find formulas for X, Y, and Z in terms of A, B, and C, and justify your calculations. In some cases, you may need to make assumptions about the size of a matrix in order to produce a formula. [68][8 A B X Y 0 I 0 0 Z I 1
Solve the Leontief production equation for an economy with three sectors, given that C= .2 .3 .1 .2 .1 .0 032 .0 .3 and d- 40 [ 60 80
Refer to an economy that is divided into three sectors—manufacturing, agriculture, and services. For each unit of output, manufacturing requires .10 unit from other companies in that sector, .30 unit from agriculture, and .30 unit from services. For each unit of output, agriculture uses .20 unit
Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Translate by (-3, 4) and then scale the x-coordinate by .7 and the y-coordinated by 1.3.
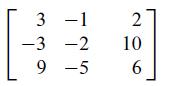
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 3-1 -3-2 9-5 2 10 6
Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Rotate points through 60° about the point (6, 8).
Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Reflect points through the x-axis, and then rotate 30° about the origin.
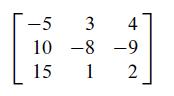
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. -5 10 15 3X 3 4 -8 -9 1 2
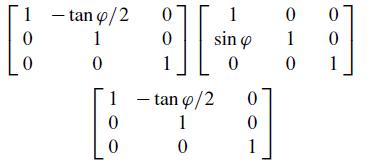
A rotation in R2 usually requires four multiplications. Compute the product below, and show that the matrix for a rotation can be factored into three shear transformations (each of which requires only one multiplication). 1 0 0 -tan 4/2 1 0 1 0 0 0 ][* 1 1 sino 0 -tan 4/2 1 0 0 0 1 0 1 0 0 0 1
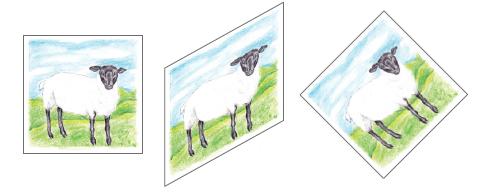
A rotation on a computer screen is sometimes implemented as the product of two shear-and-scale transformations, which can speed up calculations that determine how a graphic image actually appears in terms of screen pixels. (The screen consists of rows and columns of small dots, called pixels.) The
Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Rotate points 30°, and then reflect through the x-axis.
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 2-4 2 15 5 -4 4 -6-2
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 9- L- 9 3-6 -1 7 3 2 0
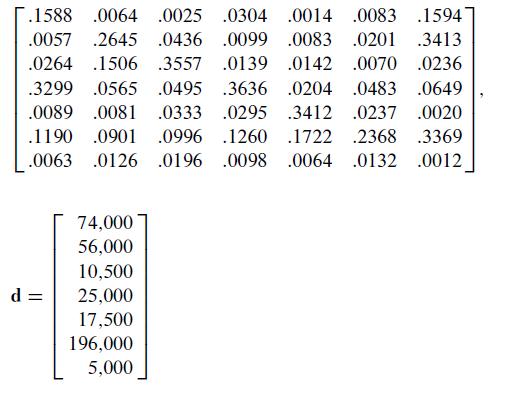
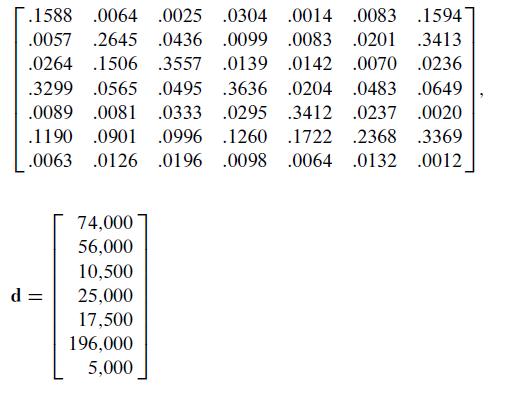
The consumption matrix C below is based on input–output data for the U.S. economy in 1958, with data for 81 sectors grouped into 7 larger sectors: (1) nonmetal household and personal products, (2) final metal products (such as motor vehicles), (3) basic metal products and mining, (4) basic
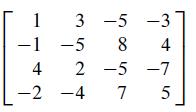
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 1 3-5 5855 -1 -5 4 2 -5 -2 -4 7 -3 4 -7 5
Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Rotate points through 45° about the point (3, 7).
The inverse ofFind X, Y, and Z. I C A 0 I B 0 I 0 lis is | Z I X 0 ΖΙ 0 ] 0 YI
Consider the following geometric 2D transformations: D, a dilation (in which x-coordinates and y-coordinates are scaled by the same factor); R, a rotation; and T, a translation. Does D commute with R? That is, is D (R(x)) = R (D(x)) for all x in R²? Does D commute with T? Does R commute with T?
Letwhere B and C are square. Show that A is invertible if and only if both B and C are invertible. A || B 0 0 с
Suppose A11 is invertible. Find X and Y such thatwhere S = A22 - A21 A-¹11 A12. The matrix S is called theSchur complement of A11. Likewise, if A22 is invertible, the matrix A11 - A12 4-122 421 is called the Schur complement of A22. Such expressions occur frequently in the theory ofsystems
Find A-1 as in Exercise 17, using A from Exercise 3.Data from in Exercise 17When A is invertible, MATLAB finds A-1 by factoring A = LU (where I may be permuted lower triangular), inverting L and U, and then computing U-¹L-¹. Use this method to compute the inverse of A.Data from in Exercise 3Solve
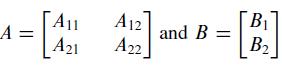
Mark each statement True or False (T/F). Justify each answer.(T/F) Ifthen the partitions of A and B are conformable for block multiplication. A [ [A₁1 A21 A12 A22 = [B₂] and B =
The demand vector in Exercise 13 is reasonable for 1958 data, but Leontief’s discussion of the economy in the reference cited there used a demand vector closer to 1964 data:d = (99640, 75548, 14444, 33501, 23527, 263985, 6526)Find the production levels needed to satisfy this demand.Data from in
The usual transformations on homogeneous coordinates for 2D computer graphics involve 3 × 3 matrices of the formwhere A is a 2 × 2 matrix and p is in R2. Show that such a transformation amounts to a linear transformation on R2 followed by a translation. L A 0T Р 1
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 2-4 6-9 -4 - 1 4-2 7-3 8 0
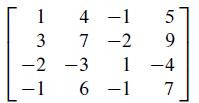
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 1 4 -1 3 7 -2 -3 -2 - 1 5 9 1 -4 7 6 -1
A 2 × 200 data matrix D contains the coordinates of 200 points. Compute the number of multiplications required to transform these points using two arbitrary 2 x 2 ma- trices A and B. Consider the two possibilities A(BD) and (AB) D. Discuss the implications of your results for computer graphics
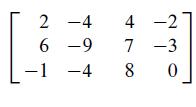
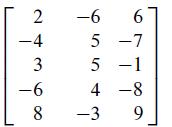
Find an LU factorization of the matrices (with L unit lower triangular). Note that MATLAB will usually produce a permuted LU factorization because it uses partial pivoting for numerical accuracy. 2 -6 6 5 -7 5 -1 4-8 9 -4 36 3 -6 8 -3
The consumption matrix C for the U.S. economy in 1972 has the property that every entry in the matrix (I - C)-¹ isnonzero (and positive)1. What does that say about the effectof raising the demand for the output of just one sector of theeconomy?
What vector in R3 has homogeneous coordinates G-E » 12 18 36.
Mark each statement True or False (T/F). Justify each answer. (T/F) If A1, A2, B₁, and B₂ are n x n matrices,and B = [B₁ is not. B₂], then the product BA is defined, but AB is not. A A₁ [4]. A₂
Mark each statement True or False (T/F). Justify each answer.(T/F) The definition of the matrix–vector product Ax is a special case of block multiplication.
Let C be a consumption matrix such that Cm → 0 as m → ∞, and for m = 1,2,..., let Dm = 1 + C +...+ Cm. Find a difference equation that relates Dm and Dm+1 and thereby obtain an iterative procedure for computing formula (8) for (I - C)-¹.
Show that the transformation in Exercise 7 is equivalent to a rotation about the origin followed by a translation by p. Find p.Data from in Exercise 7Find the 3 × 3 matrices that produce the described composite 2D transformations, using homogeneous coordinates.Rotate points through 60° about the
Suppose the block matrix A on the left side of (7) is invertible and A11 is invertible. Show that the Schur complement S of A11 is invertible.
Are (1, -2, 3, 4) and (10, -20, 30, 40) homogeneous coordinates for the same point in R3? Why or why not?
Give the 4 x 4 matrix that rotates points in R³ about the z-axis through an angle of -30°, and then translates by P = (5, -2, 1).
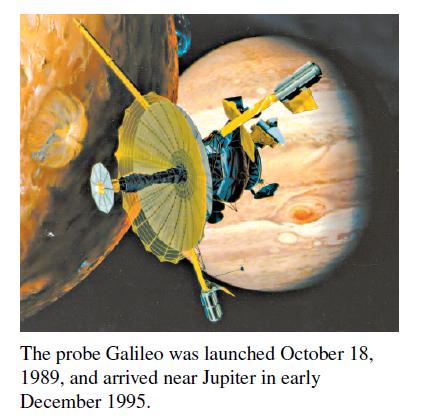
When a deep space probe is launched, corrections may be necessary to place the probe on a precisely calculated trajectory. Radio telemetry provides a stream of vectors, X₁,..., xk, giving information at different times about how the probe's position compares with its planned trajectory. Let Xk be
Let A be a lower triangular n × n matrix with nonzero entries on the diagonal. Show that A is invertible and A-1 is lower triangular.
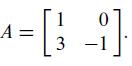
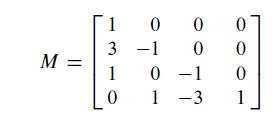
a. Verify that A2 = I whenb. Use partitioned matrices to show that M2 = I when A = 0 [31] - 1
Suppose the transfer function W(s) in Exercise 21 is invertible for some s. It can be shown that the inverse transfer function W (s)-1, which transforms outputs into inputs, is theSchur complement of A - BC - sIn for the matrix below. Find this Schur complement. See Exercise 17.Data from in
Assume A - SIn is invertible and view (8) as a system of two matrix equations. Solve the top equation for x and substitute into the bottom equation. The result is an equation of the form W(s)u = y, where W(s) is a matrix that depends on s. W(s) is called the transfer function of the system because
Let S be the triangle with vertices (4.2, 1.2, 4), (6, 4, 2), (2, 2, 6). Find the image of S under the perspective projection with center of projection at (0, 0, 10).
Showing 1700 - 1800
of 2241
First
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Step by Step Answers