New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
machine elements in mechanical design
Theory Of Machines Kinematics And Dynamics 3rd Edition Sadhu Singh - Solutions
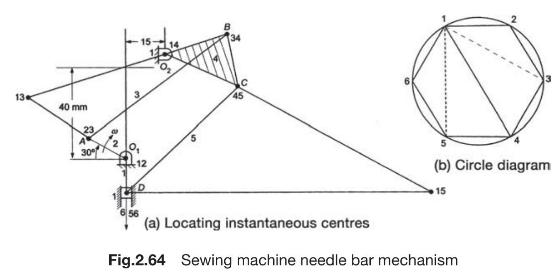
The sewing machine needle bar mechanism is shown in Fig.2.64(a). Crank 2 rotates at \(450 \mathrm{rpm}\).Determine the velocity of the needle at \(D\).\(O_{1} A=15 \mathrm{~mm}, O_{2} B=25 \mathrm{~mm}, A B=65 \mathrm{~mm}, B C=20 \mathrm{~mm}, C D=60 \mathrm{~mm}\) and \(\angle O_{2} B
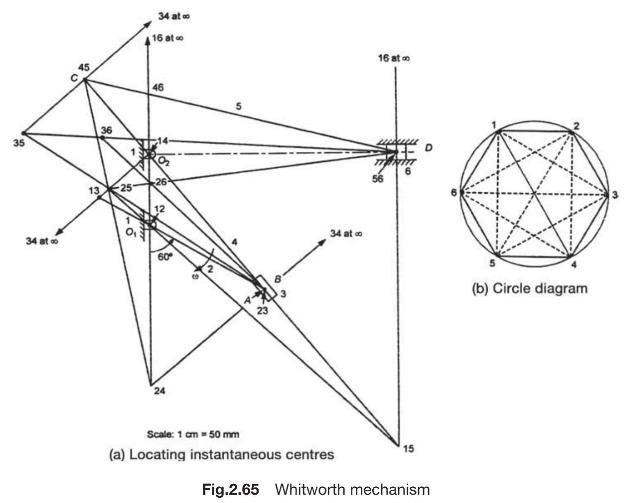
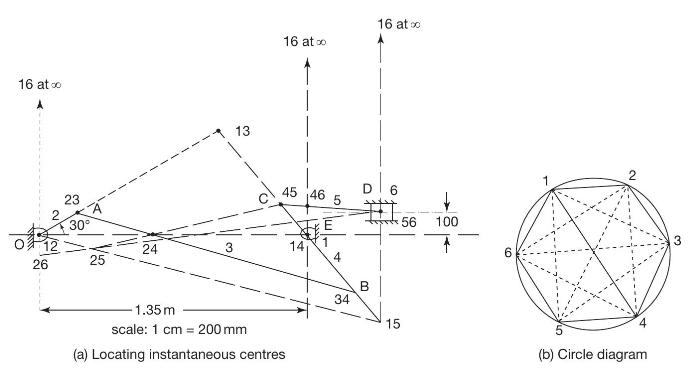
Figure 2.65 shows the Whitworth mechanism. The crank \(O_{1} A\) rotates at \(120 \mathrm{rpm} . O_{1} O_{2}=100 \mathrm{~mm}\), \(O_{1} A=200, O_{2} C=150 \mathrm{~mm}\), and \(C D=500 \mathrm{~mm}\). Locate all the instantaneous centres and find the velocity of ram \(D\). 35 35 34 at 36 34 at 16
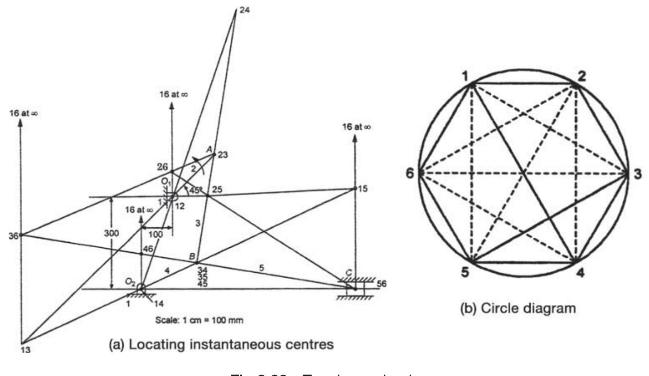
Locate all the instantaneous centres of the toggle mechanism shown in Fig.2.66. The crank rotates at \(240 \mathrm{rpm} . O_{1} A=200 \mathrm{~mm}, A B=360 \mathrm{~mm}, O_{2} B=200 \mathrm{~mm}\), and \(B C=525 \mathrm{~mm}\). Determine (a) velocity of slider \(C\) and (b) angular velocity of
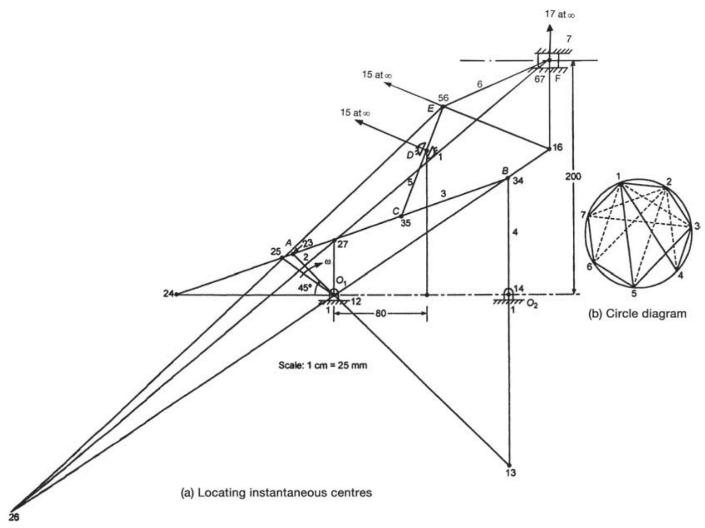
The mechanism shown in Fig. 2.67 has the following dimensions:\(O_{1} A=50 \mathrm{~mm}, A B=200 \mathrm{~mm}, C D=60 \mathrm{~mm}, O_{2} B=100, O_{1} O_{2}=150 \mathrm{~mm}, A C=C B\), and \(C E=\) \(E F=100 \mathrm{~mm}\). The crank \(O_{1} A\) rotates at \(210 \mathrm{rpm}\). Determine by
A mechanism shown in Fig. 2.68 has the following dimensions:\(O A=200 \mathrm{~mm}, A B=1500 \mathrm{~mm}, B C=600 \mathrm{~mm}, C D=500 \mathrm{~mm}\) and \(B E=40 \mathrm{~mm}\). Locate all the instantaneous centres.If the crank \(O A\) rotates uniformly at \(120 \mathrm{rpm}\) clockwise,
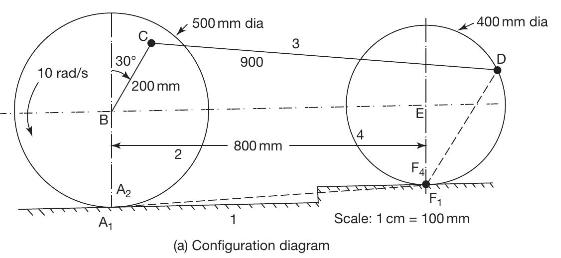
For the two rolling wheels shown in Fig.2.69(a), determine the angular velocity of links 3 and 4 and \(v_{e b}\). 500 mm dia 3 30 900 10 rad/s 200 mm B A A 4 800 mm 2 'F (a) Configuration diagram Scale: 1 cm 100 mm 400 mm dia D
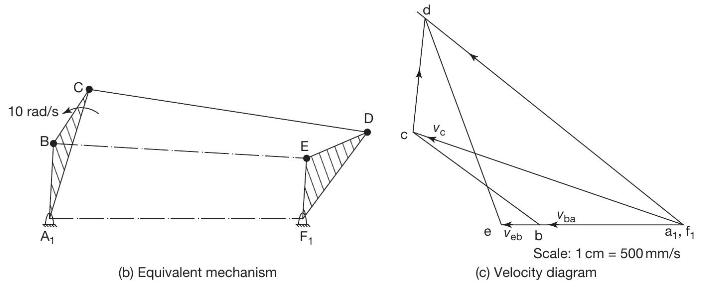
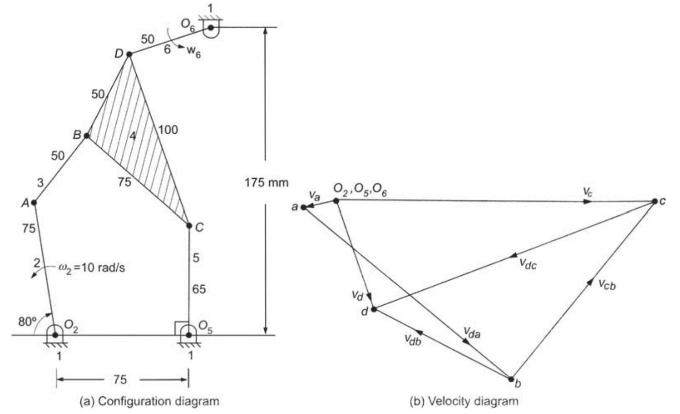
For the mechanism shown in Fig.2.72(a), determine \(\omega_{4}\) and \(\omega_{6}\). 3 B D 50 50 50 50 75 A 75 75 100 0 22=10 rad/s 5 65 80 75 175 mm a Va 02,05,06 (a) Configuration diagram Vda Vdc (b) Velocity diagram Vcb
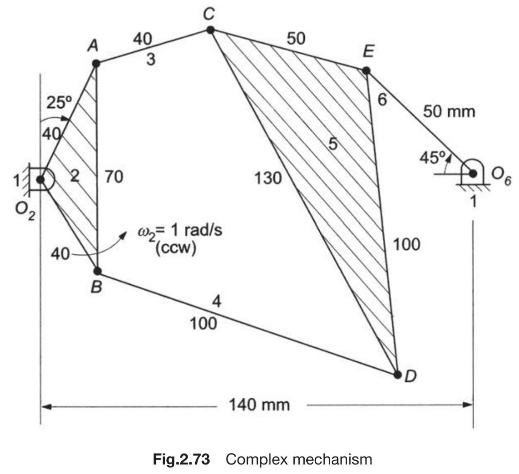
For the mechanism shown in Fig.2.73, determine \(\omega_{6}\). A 40 50 E 3 25 6 50 mm 40 2 70 5 45% 10 130 02 40- 40 B w=1 rad/s (ccw) 4 100 140 mm 100 Fig.2.73 Complex mechanism D
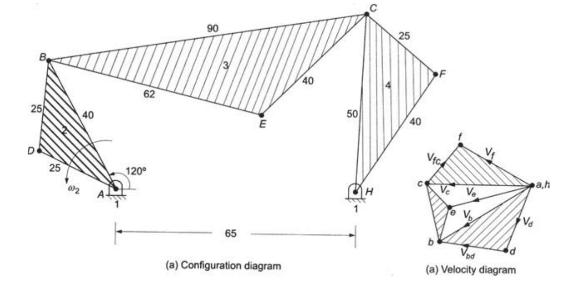
For the mechanism, shown in Fig.2.75(a), the linear velocity of point E is 2.3 m/s. Link 2 rotates at uniform angular velocity in the counter-clockwise direction. Determine \(\omega_{2}\), \(\omega_{3}\), and \(\omega_{4}\). 25 40 62 120 90 65 E 40 25 50 50 40 Ve a,h (a) Configuration diagram b d
The C.G. of a link in any mechanism would experience(a) zero acceleration(b) linear acceleration(c) angular acceleration(d) both angular and linear accelerations.
Coriolis components of acceleration is encountered in(a) four bar mechanism(b) lower pairs(c) higher pairs(d) Whitworth quick return motion.
Coriolis components of acceleration exists whenever a point moves along a path that has(a) linear displacement(b) rotational motion(c) tangential acceleration(d) centripetal acceleration.
The total acceleration of \(B\) relative to \(A\) is(a) \(\left[\left(\omega^{2}{ }_{A B} \times A B\right)^{2}+(\alpha \times A B) 2\right]^{1 / 2}\)(b) \(\omega^{2}{ }_{A B} \times A B+\alpha \times A B\)(c) \(\left[\omega_{A B} \times A B^{2}+\alpha \times A B^{2}\right]^{1 / 2}\)(d)
The total acceleration of \(B\) relative to \(A\) is inclined to \(A B\) at an angle tangent of which is given by(a) \(\alpha / \omega^{2}\)(b) \(\alpha / \omega\)(c) \(\omega^{2} / \alpha\)(d) \(\omega / \alpha\)
The velocity of slider-crank mechanism is given by(a) \((\omega L / 2)[\sin \theta+(L / 4 l) \sin 2 \theta]\)(b) \(\left(\omega^{2} L / 2\right)[\sin \theta+(L / 2 l) \sin 2 \theta]\)(c) \((\omega L / 2)[\cos \theta+(L / 4 l) \cos 2 \theta]\)(d) \(\left(\omega^{2} L / 2\right)[\cos \theta+(L / 2 l)
The linear acceleration of piston of a reciprocating engine is(a) \(\omega^{2} r[\cos \theta+\cos 2 \theta /(2 n)]\)(b) \(\omega^{2} r[\cos \theta+\cos 2 \theta / n]\)(c) \(\omega^{2} r[\sin \theta+\sin 2 \theta /(2 n)]\)(d) \(\omega^{2} r[\sin \theta+\sin 2 \theta / n]\)where \(n=l / r\).
The angular velocity of the connecting rod of a reciprocating engine is approximately given by(a) \(\omega \cos \theta / n\)(b) \(\omega \sin \theta / n\)(c) \(\omega \cos \theta /(2 n)\)(d) \(\omega \sin \theta /(2 n)\).
The angular acceleration of the connecting rod of a reciprocating engine is approximately given by(a) \(\omega^{2} \cos \theta / n\)(b) \(\omega^{2} \sin \theta / n\)(c) \(\omega^{2} \cos \theta /(2 n)\)(d) \(\omega^{2} \sin \theta /(2 n)\).
Klein's construction is used mainly to determine the(a) linear velocity of the piston(b) linear acceleration of the piston(c) linear displacement of the piston(d) all of the above.
A slider slides along a straight link with uniform velocity \(\mathrm{v}\) and the link rotates about a point with uniform angular speed \(\omega\). The Coriolis components of acceleration of a point on the slider at a distance \(r\) from the centre of rotation is(a) \(v^{2} / r\) parallel to
The Coriolis component of acceleration occurs in(a) slider-crank mechanism(b) Scotch-yoke mechanism(c) oscillating cylinder mechanism(d) four-bar chain.
The direction of the Coriolis component of acceleration is(a) along the surface of sliding(b) perpendicular to the surface of sliding in the direction of angular speed(c) perpendicular to the surface of sliding in the direction opposite to the direction of angular speed(d) inclined to the surface
Define normal and tangential components of acceleration.
How do you determine normal and tangential components of acceleration?
What is acceleration image? How it is helpful in determining the acceleration of offset points in a mechanism?
Define Coriolis component of acceleration. When it occurs?
How do you determine coriolis components of acceleration?
What is the use of Klein’s construction?
A link \(A B\) of a four-bar mechanism \(A B C D\) revolves uniformly at \(120 \mathrm{rpm}\) in a clockwise direction. Find the angular acceleration of links \(B C\) and \(C D\) and acceleration of pont \(E\) in link \(B C\). Given: \(A B=75 \mathrm{~mm}, B C=175 \mathrm{~mm}, E C=50 \mathrm{~mm},
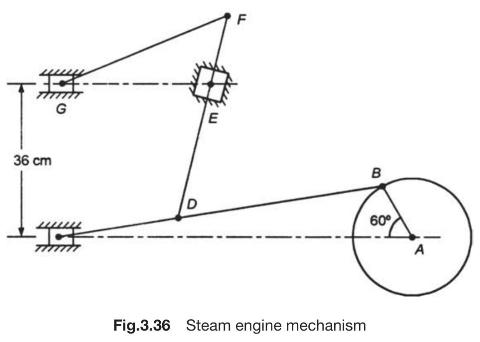
In the steam engine mechanism shown in Fig.3.36, the crank \(A B\) rotates at \(200 \mathrm{rpm}\) clockwise. Find the velocities of \(C, D, E, F\), and \(G\), and the acceleration of slider at \(C . A B=120 \mathrm{~mm}\), \(B C=4780 \mathrm{~mm}, C D=180 \mathrm{~mm}, D E=360 \mathrm{~mm}, E
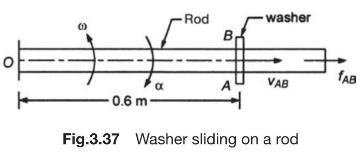
In the Fig.3.37, the washer is sliding outward on the rod with a velocity of \(1.2 \mathrm{~m} / \mathrm{s}\) when distance from point \(O\) is \(0.6 \mathrm{~m}\). Its velocity along the rod is increasing at the rate of \(0.9 \mathrm{~m} / \mathrm{s}^{2}\). The angular velocity of rod is \(5
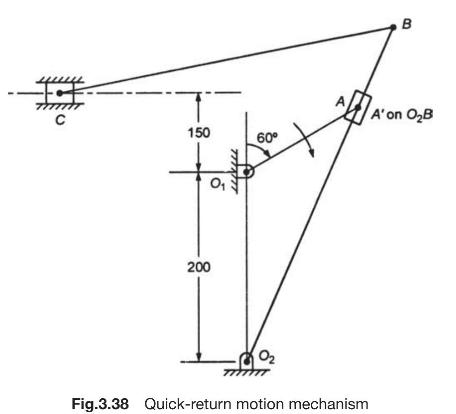
The driving crank \(O_{1} A\) of the quick-return motion mechanism shown in Fig. 3.38 resolves at a uniform speed of \(200 \mathrm{rpm}\) clockwise. Find the velocity and acceleration of tool post \(C\) when the crank makes an angle of \(60^{\circ}\) with the vertical line of centres \(O_{1}
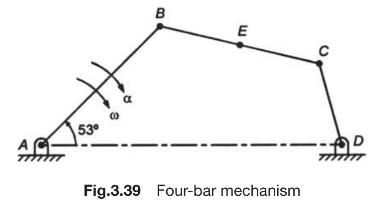
The crank \(A B\) of a four-bar mechanism shown in Fig. 3.39 rotates with an angular speed of 100 \(\mathrm{rad} / \mathrm{s}\) and an angular acceleration of \(4400 \mathrm{rad} / \mathrm{s}^{2}\) when the crank makes an angle of \(53^{\circ}\) to the horizontal. Determine (a) the angular
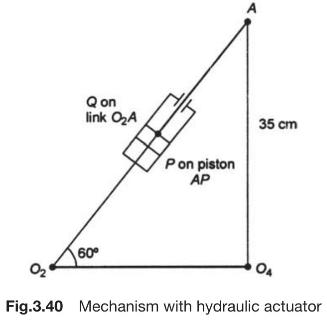
Fig. 3.40 shows a mechanism in which the hydraulic actuator \(O_{2} A\) is expanding at a constant rate of \(10 \mathrm{~cm} / \mathrm{s}\). Determine the directions and magnitudes of the angular velocity and acceleration of link \(O_{4} A\). Qon link OA Pon piston 60 AP 35 cm Fig.3.40 Mechanism
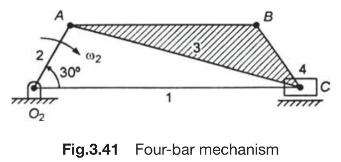
For the mechanism shown in Fig.3.41, find the acceleration of point \(B\) in link 3. Given: \(\omega_{2}=30\) \(\mathrm{rad} / \mathrm{s}, O_{2} A=200 \mathrm{~mm}, A B=B C=175 \mathrm{~mm}, A C=600 \mathrm{~mm}\). (02 30 1 B 02 Fig.3.41 Four-bar mechanism
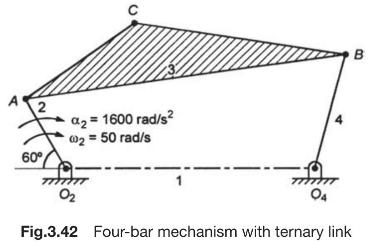
Determine the angular acceleration of links 3 and 4 and the absolute acceleration of point \(C\) on link 3 in the mechanism shown in Fig.3.42. \(O_{2} A=45 \mathrm{~mm}, A B=130 \mathrm{~mm}, O_{2} O_{4}=90 \mathrm{~mm}\), \(O_{4} B=60 \mathrm{~mm}, A C=55 \mathrm{~mm}, B C=100 \mathrm{~mm}\). B 60
What are the properties of instantaneous centre?
The purpose of a link is to(a) transmit motion(b) guide other links(c) act as a support(d) all of the above.
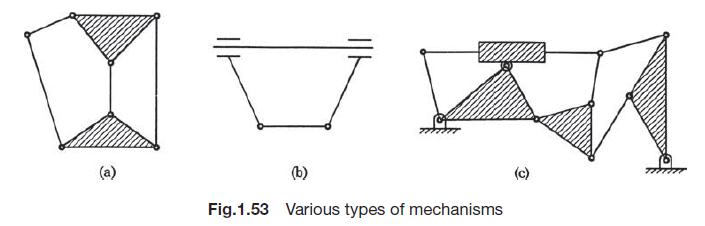
Calculate the number of degrees of freedom of the mechanisms shown in Fig.1.53. (a) (b) Fig.1.53 Various types of mechanisms (c)
Differentiate between a mechanism and a machine.
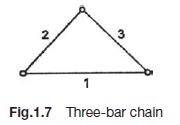
A chain with three links is shown in Fig.1.7. Prove that the chain is locked. 2 3 1 Fig.1.7 Three-bar chain
A kinematic chain requires at least(a) 2 links and 3 turning pairs(b) 3 links and 4 turning pairs(c) 4 links and 4 turning pairs(d) 5 links and 4 turning pairs.
Define kinematic link, kinematic pair and a kinematic chain.
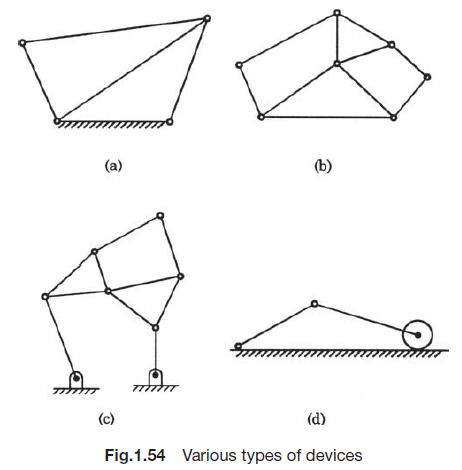
Determine the number of degrees of freedom of all the devices shown in Fig.1.54. (a) (b) (c) (d) Fig.1.54 Various types of devices
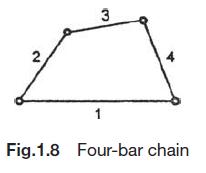
A four-bar chain is shown in Fig.1.8. Prove that it is a constrained chain. 2 3 1 Fig.1.8 Four-bar chain
Which of the following is a lower pair?(a) ball and socket(b) piston and cylinder(c) cam and follower(d) (a) and (b) above.
What is a resistant body?
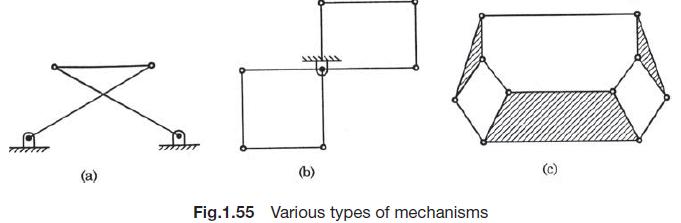
Determine the degrees of freedom of the mechanisms shown in Fig.1.55. (a) Fig.1.55 Various types of mechanisms (c)
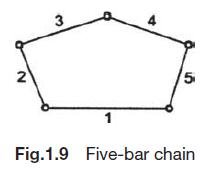
A five-bar chain is shown in Fig.1.9. Prove that it is an unconstrained chain. 3 2 1 5 Fig.1.9 Five-bar chain
Quick return motion mechanism is used in(a) milling machine(b) broaching machine(c) grinding machine(d) slotter.
How do you classify kinematic pairs? Illustrate with examples.
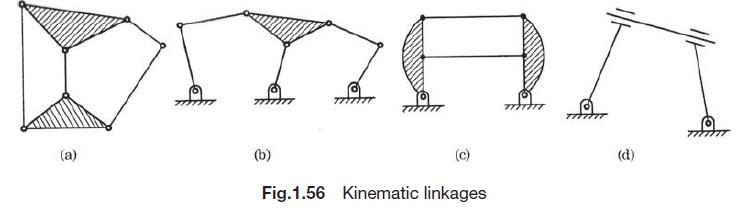
Find the degrees of freedom of the kinematic linkages shown in Fig.1.56. MAN (a) (b) (c) (d) Fig.1.56 Kinematic linkages
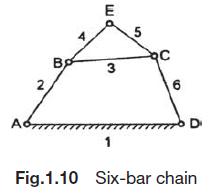
Show that the chain shown in Fig.1.10 is an unconstrained kinematic chain. 2 Bo 4 E 3 5 6 1 D Fig.1.10 Six-bar chain
A kinematic chain becomes a mechanism when(a) first link is fixed(b) any one link is fixed(c) all links are fixed(d) none of the links are fixed.
Differentiate between(a) lower and higher pairs,(b) turning and screw pairs,(c) rolling and spherical pairs, and(d) closed and unclosed pairs.
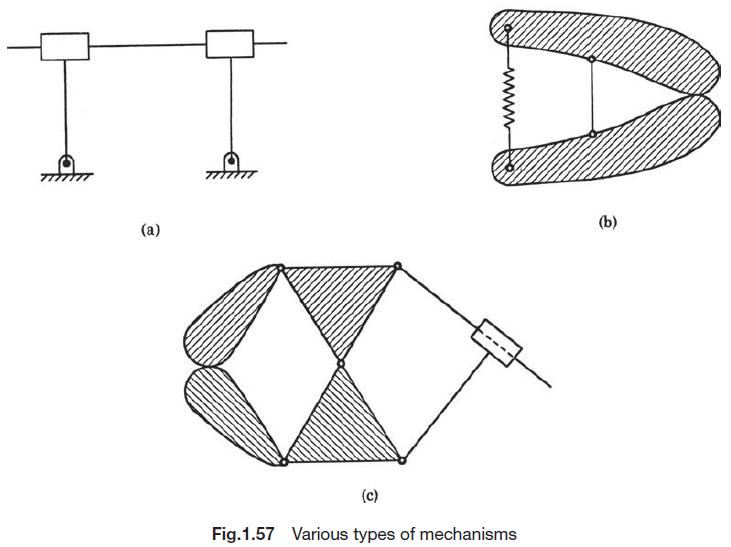
Draw the equivalent mechanisms of the following and find their degrees of freedom, as shown in Fig.1.57. (a) (b) (c) Fig.1.57 Various types of mechanisms
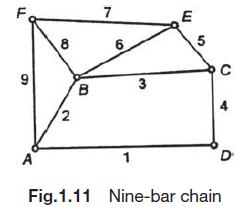
Show that the chain shown in Fig.1.11 is not a kinematic chain. 8 7 6. E 5 C 9 3 B 4 Fig. 1.11 Nine-bar chain D
A slider crank mechanism consists of the following number of turning and sliding pairs(a) 1, 3(b) 2, 2(c) 3, 1(d) 4, 0.
Define degrees of freedom of a mechanism. How this is determined?
In a quick-return motion mechanism of the oscillating link type, the distance between the fixed centres is 80mm and the length of the driving crank is 20 mm. Determine the time ratio of the working stroke to the return stroke.
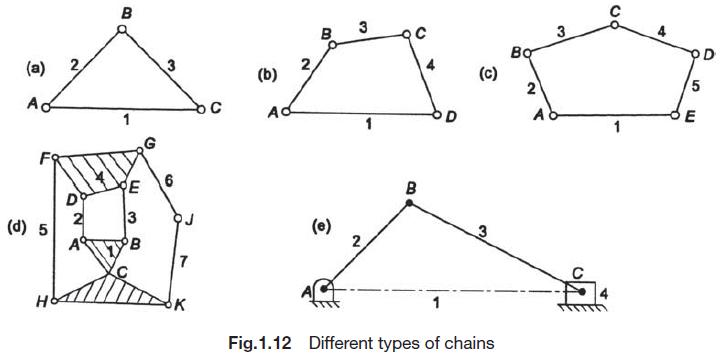
Determine the type of chain in Fig.1.12(a)–(e). (a) Ad 2 B 3 (b) C Ad RE 6 D (d) 5 2 3 - A B 7 B 3 (e) 0 D 3 Bo (c) 2 5 Ab E 1 B 3 Fig.1.12 Different types of chains
A typewriter constitutes a(a) machine(b) structure(c) mechanism(d) inversion.
Explain Gruebler’s criterion for degrees of freedom for planar mechanisms.
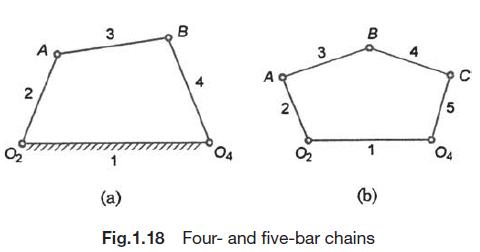
Calculate the number of degrees of freedom of the linkages shown in Fig.1.18(a) and (b). A 2 02 3 B (a) B 3 D Aq 2 A 02 OA (b) Fig.1.18 Four- and five-bar chains C 5
In an off-set slider crank mechanism, the eccentricity is 50 mm, length of crank is 300 mm, and length of connecting rod is 500 mm, determine the quick return ratio.
The lead screw of a lathe with nut is a(a) rolling pair(b) screw pair(c) turning pair(d) sliding pair.
What do you understand by an equivalent mechanism?
In a quick-return motion mechanism of the crank and slotted lever type, the ratio of maximum velocities is 2. If the length of stroke is 250 mm, find(a) the length of the slotted lever,(b) the ratio of times of cutting and return strokes, and(c) the maximum cutting velocity in m/s if the crank
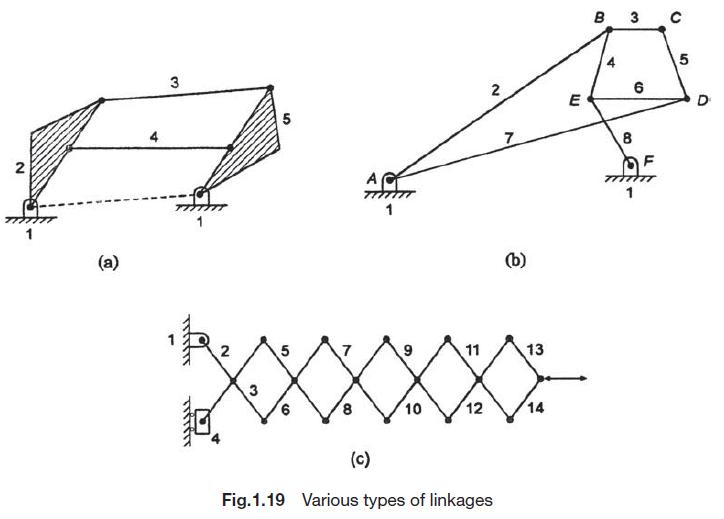
Calculate the number of degrees of freedom of the linkages shown in Fig.1.19(a) to (c). 2 4 1 (a) 3 2 5 3 5 6 7 1 6 2 B 3 C 7 E (b) 11 13 8 10 12 14 (c) Fig. 1.19 Various types of linkages 5 6 D 8
In kinematic chain, a ternary joint is equivalent to(a) two binary joints(b) three binary joints(c) four binary joints(d) single binary joint.
Discuss various types of constrained motions.
The distance between the parallel shafts of an Oldham’s coupling is 15 mm. The driving shaft revolves at 160 rpm. Calculate the maximum speed of sliding of the tongue of the intermediate piece along its groove.
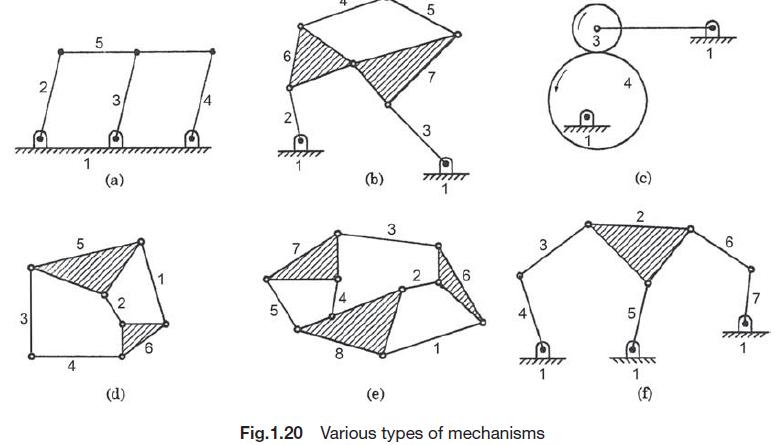
Determine the number of degrees of freedom of the mechanism shown in Fig.1.20(a) to (f). 5 2 3 3 5 (a) 2 5 8 (b) 3 5 3 2 6 (c) 1 6 7 LO 5 T 1 (f) (d) (e) Fig. 1.20 Various types of mechanisms
A four-bar mechanism satisfying Grashof’s criteria will act as a drag-crank mechanism, if(a) the longest link is fixed(b) the shortest link is fixed(c) any link adjacent to shortest link is fixed.
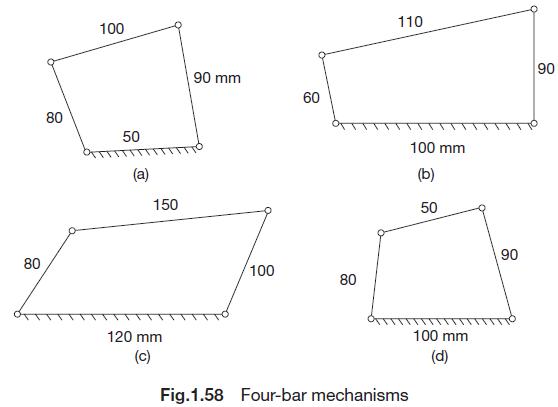
Determine the type of chains shown in Fig.1.58. 80 50 100 80 60 90 mm 50 (a) 150 60 60 110 100 80 100 mm (b) 50 00 90 90 90 100 mm (d) 120 mm (c) Fig.1.58 Four-bar mechanisms
What is mobility (or movability) of a mechanism?
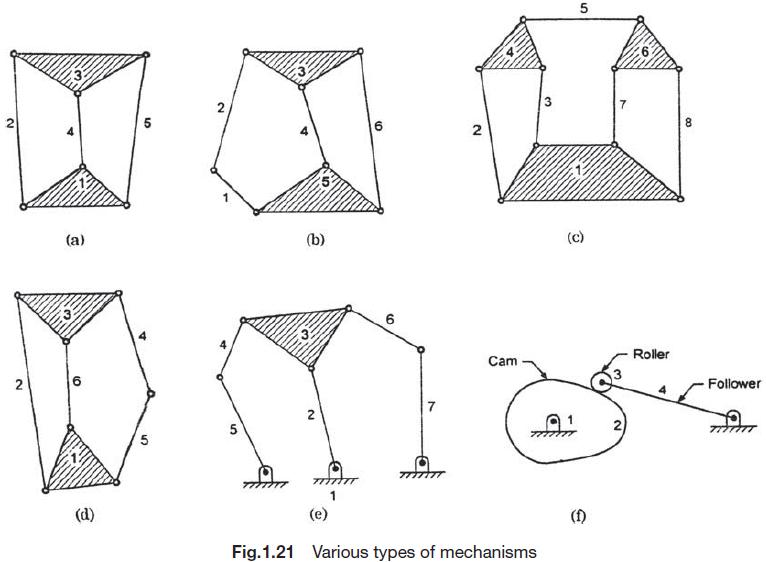
Determine the number of degrees of freedom of the mechanism shown in Fig.1.21(a) to (f). 2 2 (a) (b) 2 5 6 2 3 5 (c) Roller Cam Follower 77777 (d) (e) Fig.1.21 Various types of mechanisms
In a four-bar mechanism, (l + s) < (p + q). It will act as a crank-rocker mechanism, if(a) the link opposite to the shortest link is fixed(b) the shortest link is fixed(c) any link adjacent to shortest link is fixed.
What is a kinematic chain? How this can be ascertained?
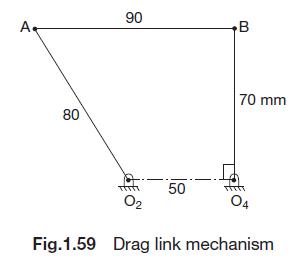
A drag link quick return mechanism is shown in Fig.1.59. Determine the time ratio of the working stroke to the return stroke for uniform angular velocity of crank O1A. A 80 90 B 70 mm 02 50 04 Fig.1.59 Drag link mechanism
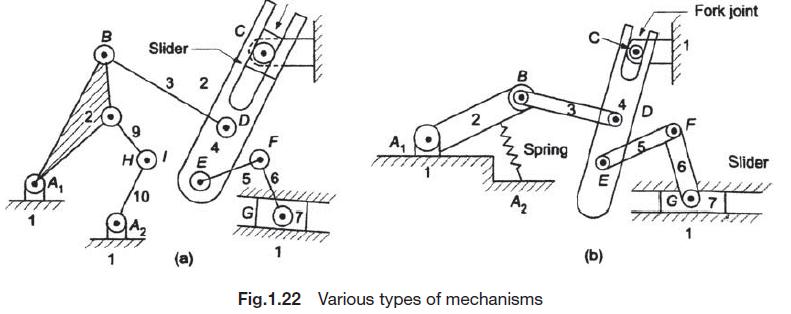
Determine the number of degrees of freedom of the mechanism shown in Fig.1.20 (a)–(h). H 10 Slider 3 2 5 6 GOT 1 (a) 2 Fork joint Spring 6 E A 44001 1 (b) Fig.1.22 Various types of mechanisms Slider
In a four-bar mechanism, the sum of the lengths of shortest and longest links is less than the sum of other two links. It will act as a rocker-rocker mechanism, if(a) the link opposite to the shortest link is fixed(b) the shortest link is fixed(c) any link adjacent to shortest link is fixed.
What do you understand by inversion of a mechanism? List various inversions of a four-bar chain.
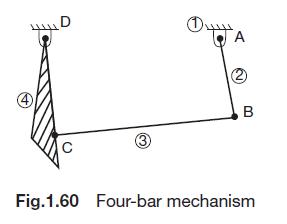
Classify the motion of the four-bar mechanism shown in Fig. 1.60, l1 = 80 cm, l2 = 30 cm, l3 = 75 cm, l4 =65 cm. A B Fig.1.60 Four-bar mechanism
Find the equivalent mechanisms with turning pairs for the mechanisms shown in Figs.1.23(a) to (d).
Which of the following is an inversion of single-slider crank chain?(a) elliptical trammel(b) hand pump(c) Scotch yoke(d) Oldham’s coupling.
Describe various inversions of a single slider–crank chain.
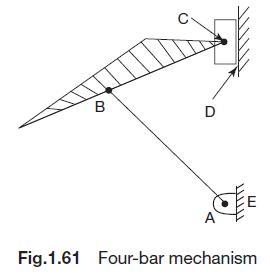
Find the number of degrees of freedom of the mechanism shown in Fig.1.61. B D E A Fig.1.61 Four-bar mechanism
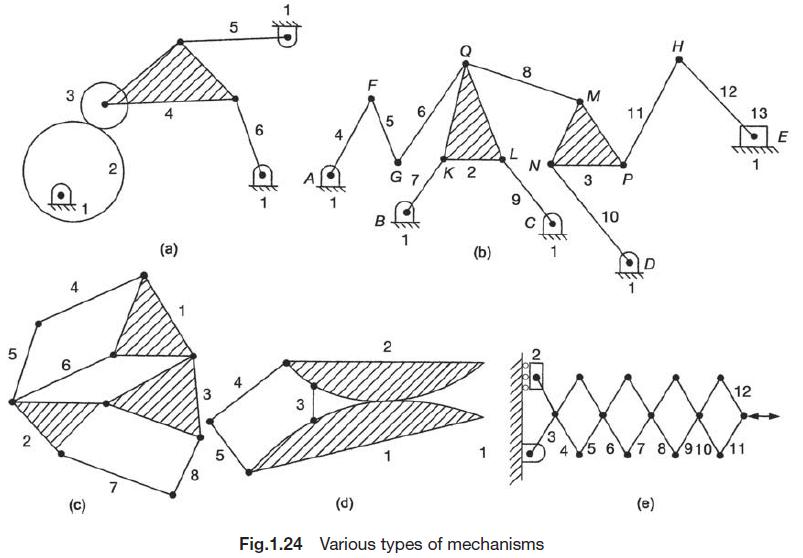
Calculate the degrees of freedom of the mechanisms shown in Fig.1.24(a–e). 3 5 6 2 (c) 2 (a) 5 3 5 8 7 6 3 + n 8 H M 12 5 6 11, 13 E B G7 K 2 N 1 3 P 10 1 (b) 2 (d) Fig.1.24 Various types of mechanisms 12 4 5 6 7 8 910 11 (e)
Which one of the following is an inversion of double-slider crank chain?(a) Whitworth quick return motion mechanism(b) reciprocating compressor(c) Scotch yoke(d) rotary engine.
List the various inversions of a double slider–crank chain and give their applications.
Classify the four-bar mechanism based on its possible motion, when the lengths of the links are: l1 = 30 cm, l2 = 12.5 cm, l3 = 30 cm, and l4 = 10 cm.
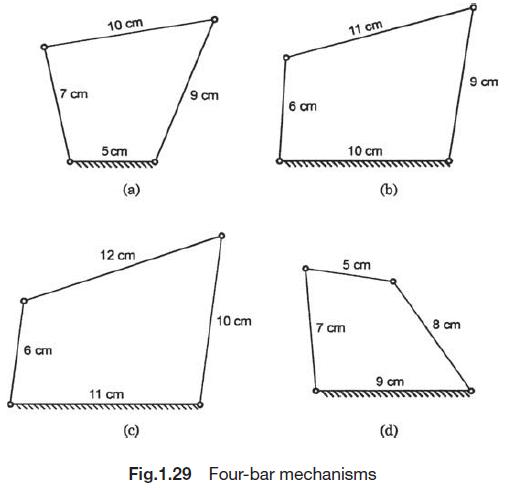
Identify the nature of each mechanism shown in Fig.1.29(a) to (d). 6 cm 10 cm 7 cm 9 cm 5 cm 12 cm 11 cm (c) 6 cm 11 cm 10 cm (b) 5 cm 10 cm 8 cm 7 cm Fig.1.29 Four-bar mechanisms 9 cm (d) 9 cm
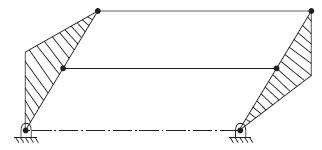
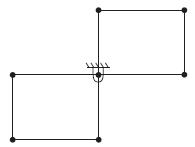
The number of degrees of freedom of the mechanism shown below is:(a) 0(b) 1(c) 2(d) 3
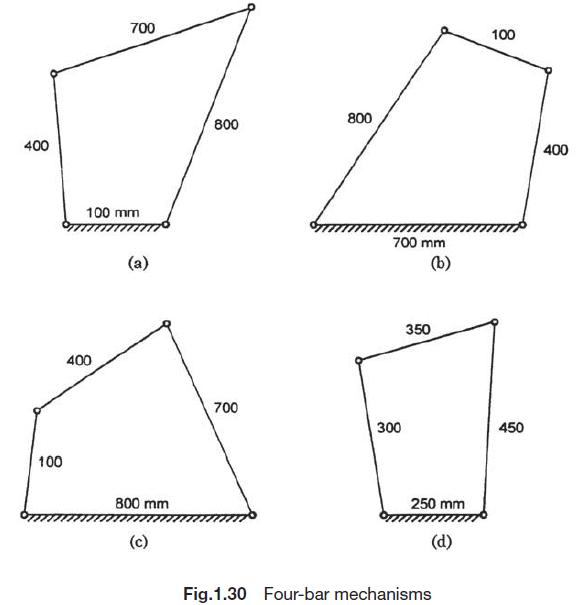
Identify the nature of the mechanisms shown in Fig.1.30(a) to (d). 400 100 700 100 mm 400 (a) 800 mm (c) 800 100 800 400 700 mm (b) 350 700 300 450 250 mm Fig.1.30 Four-bar mechanisms (d)
The number of degrees of freedom of the mechanism shown below is:(a) 0(b) 1(c) 2(d) 3
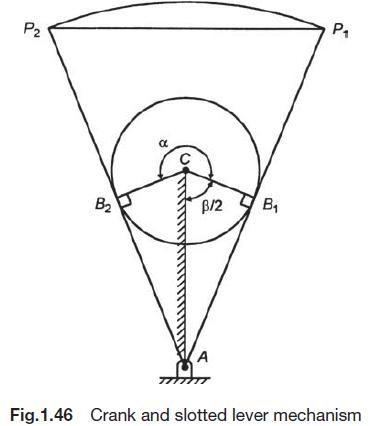
In a crank and slotted lever quick-return mechanism shown in Fig.1.46, the distance between the fixed centres is 300 mm and the length of the driving crank is 150 mm. Find the inclination of the slotted lever with the vertical in the extreme position and the ratio of time of cutting stroke to
The number of equivalent lower pairs of a higher pairs are(a) 2(b) 3(c) 4(d) 1
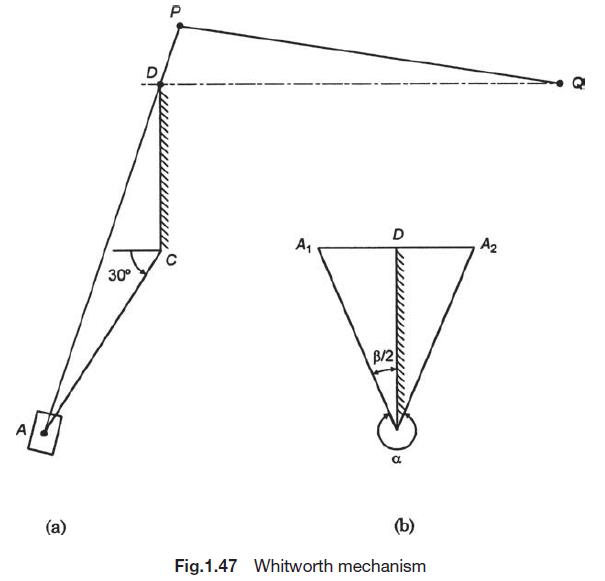
In a Whitworth quick return motion mechanism, as shown in Fig.1.47, the distance between the fixed centres is 80 mm and the length of the driving crank is 100 mm. The length of the slotted lever is 180 mm and the length of the connecting rod is 150 mm. Calculate the ratio of the time of cutting to
The equivalent number of binary joints of a quaternary joint are:(a) 2(b) 3(c) 4(d) 5
Showing 1100 - 1200
of 1879
First
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Step by Step Answers