New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
control systems engineering
Control Systems Engineering 7th Edition Norman S. Nise - Solutions
Describe a typical control system analysis task.
Instability is attributable to what part of the total response?
Physically, what happens to a system that is unstable?
Repeat Problem 21 in Chapter 1, using Laplace transforms. Use the following initial conditions for each part as follows:(a) x (0) = 4; x´(0) = -4;(b) x(0) = 4; x´(0) = 1;(c) x(0) = 2; x´(0) = 3, where x´(0) = dx/dt(0).Assume that the forcing functions are zero prior to t(0).Data From Problem 21
What assumption is made concerning initial conditions when dealing with transfer functions?
Repeat Problem 20 in Chapter 1, using Laplace transforms. Assume that the forcing functions are zero prior to t = 0-.Data From Problem 20 in Chapter 1:Solve the following differential equations using classical methods. Assume zero initial conditions.a. dx/dt + 7x = 5 cos 2tb. d2x/dt2 + 6dx/dt + 8x
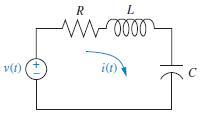
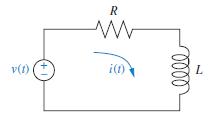
Repeat Problem 19 in Chapter 1, using Laplace transforms. Assume zero initial conditions.Data From Problem 19 in Chapter 1:Repeat Problem 18 using the network shown in Figure P1.7. Assume R=1Ω; L=0.5H; and1/LC = 16.Data From Problem 18:Given the electric network shown in Figure.a. Write the
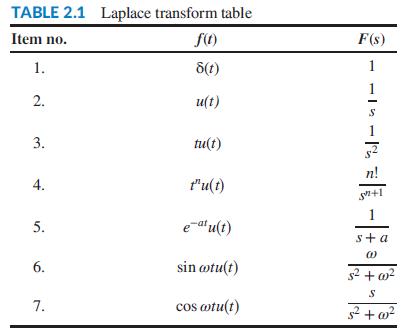
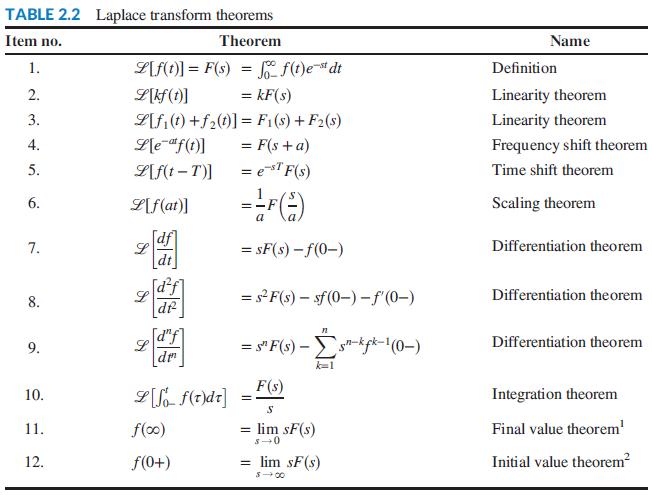
Using the Laplace transform pairs of Table 2.1 and the Laplace transform theorems of Table 2.2, derive the Laplace transforms for the following time functions:a. e-atsin ωt u(t)b. e-atcos ωt u(t)c. t3u(t)Table 2.1:Table 2.1: TABLE 2.1 Laplace transform table Item no. F(s) 1. 8(t) 1 1 u(t) 1 3.
To what classification of systems can the transfer function be best applied?
Derive the Laplace transform for the following time functions:a. u(t)b. tu(t)c. sin ωt u(t)d. cos ωt u(t)
A set of parabolic mirrors can be used to concentrate the sun’s rays to heat a fluid flowing in a pipe positioned at the mirrors’ focal points (Camacho, 2012). The heated fluid, such as oil, for example, is transported to a pressurized tank to be used to create steam to generate electricity or
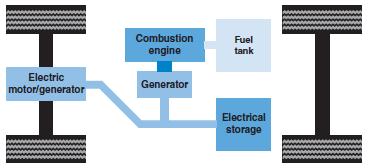
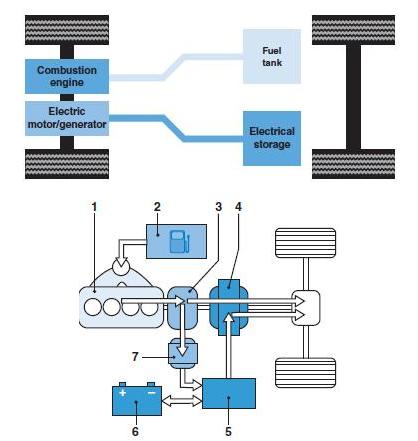
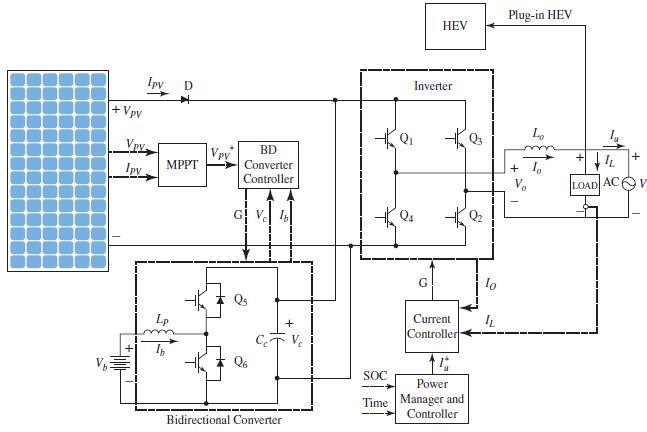
The use of hybrid cars is becoming increasingly popular. A hybrid electric vehicle (HEV) combines electric machine(s) with an internal combustion engine (ICE), making it possible (along with other fuel consumption–reducing measures, such as stopping the ICE at traffic lights) to use smaller and
As of 2012, the number of people living worldwide with Human Immunodeficiency Virus/Acquired Immune Deficiency Syndrome (HIV/ AIDS) was estimated at 35 million, with 2.3 million new infections per year and 1.6 million deaths due to the disease (UNAIDS, 2013). Currently there is no known cure for
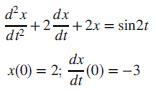
Solve the following differential equations using classical methods and the given initial conditions:a. b.c. dx dx +2 + - 2x = sin2t dr dt dx x(0) = 2; 7(0) = - dt
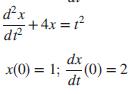
Solve the following differential equations using classical methods. Assume zero initial conditions.a. dx/dt + 7x = 5 cos 2tb. d2x/dt2 + 6dx/dt + 8x = 5 sin 3tc. d2x/dt2 + 8dx/dt + 25x = 10u(t)
Repeat Problem 18 using the network shown in Figure P1.7. Assume R = 1Ω; L = 0.5H; and1/LC = 16.Data From Problem 18:Given the electric network shown in Figure.a. Write the differential equation for the network if v(t) = u(t), a unit step.b. Solve the differential equation for the current, i(t),
Oil drilling rigs are used for drilling holes for identification of oil or natural gas sources and for extraction. An oil drilling system can be thought of as a drill inside a straw, which is placed inside a glass. The straw assembly represents the drill string, the drill surrounded by fluid, and
Figure shows the topology of a photo-voltaic (PV) system that uses solar cells to supply electrical power to a residence with hybrid electric vehicle loads (Gurkavnak, 2009). The system consists of a PV array to collect the sun’s rays, a battery pack to store energy during the day, a dc/ac
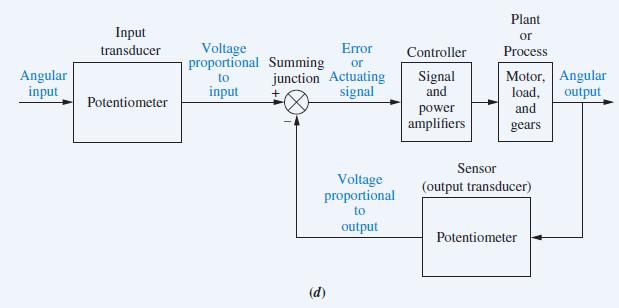
In the Case Study of Section 1.4, an antenna azimuth angle is controlled, and its corresponding block diagram is shown in Figure 1.8(d) in the text. There, the sensor used to measure the antenna’s azimuth angle is a potentiometer.a. Modify the block diagram if the sensor used to measure the
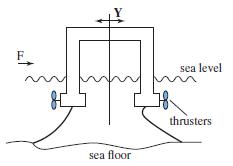
Moored floating platforms are subject to external disturbances such as waves, wind, and currents that cause them to drift. There are certain applications, such as diving support, drilling pipe-laying, and tanking between ships in which precise positioning of moored platforms is very important
Some skillful drivers can drive and balance a four wheeled vehicle on two wheels. To verify that a control system can also drive a car in this fashion, a prototype using an RC (remote-controlled) car is equipped with a feedback control system (Arndt, 2011). In a simplified system model, the roll
Tactile feedback is an important component in the learning of motor skills such as dancing, sports, and physical rehabilitation. A suit with white dots recognized by a vision system to determine arm joint positions with millimetric precision was developed. This suit is worn by both teacher and
In humans, hormone levels, alertness, and core body temperature are synchronized through a 24-hour circadian cycle. Daytime alertness is at its best when sleep/wake cycles are in sync with the circadian cycle. Thus alertness can be easily affected with a distributed work schedule, such as the one
A Segway Personal Transporter (PT) is a two-wheeled vehicle in which the human operator stands vertically on a platform. As the driver leans left, right, forward, or backward, a set of sensitive gyroscopic sensors sense the desired input. These signals are fed to a computer that amplifies them and
Name the two parts of a system’s response.
The human eye has a biological control system that varies the pupil diameter to maintain constant light intensity to the retina. As the light intensity increases, the optical nerve sends a signal to the brain, which commands internal eye muscles to decrease the pupil’s eye diameter. When the
Name the three major design criteria for control systems.
You are given a high-speed proportional solenoid valve. A voltage proportional to the desired position of the spool is applied to the coil. The resulting magnetic field produced by the current in the coil causes the armature to move. A push pin connected to the armature moves the spool. A linear
Name two advantages of having a computer in the loop.
The vertical position, x(t), of a grinding wheel is controlled by a closed loop system. The input to the system is the desired depth of grind, and the output is the actual depth of grind. The difference between the desired depth and the actual depth drives the motor, resulting in a force applied to
If the error signal is not the difference between input and output, by what general name can we describe the error signal?
During a medical operation an anesthesiologist controls the depth of unconsciousness by controlling the concentration of isoflurane in a vaporized mixture with oxygen and nitrous oxide. The depth of anesthesia is measured by the patient’s blood pressure. The anesthesiologist also regulates
State one condition under which the error signal of a feedback control system would not be the difference between the input and the output.
A dynamometer is a device used to measure torque and speed and to vary the load on rotating devices. The dynamometer operates as follows to control the amount of torque: A hydraulic actuator attached to the axle presses a tire against a rotating flywheel. The greater the displacement of the
Functionally, how do closed-loop systems differ from open-loop systems?
We can build a control system that will automatically adjust a motorcycle’s radio volume as the noise generated by the motorcycle changes. The noise generated by the motorcycle increases with speed. As the noise increases, the system increases the volume of the radio. Assume that the amount of
Give three examples of open-loop systems.
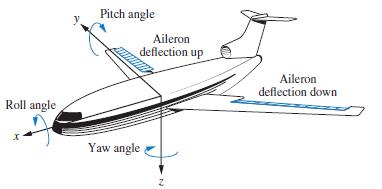
An aircraft’s attitude varies in roll, pitch, and yaw as defined in Figure. Draw a functional block diagram for a closed-loop system that stabilizes the roll as follows: The system measures the actual roll angle with a gyro and compares the actual roll angle with the desired roll angle. The
Name three reasons for using feedback control systems and at least one reason for not using them.
A temperature control system operates by sensing the difference between the thermostat setting and the actual temperature and then opening a fuel valve an amount proportional to this difference. Drawa functional closedloop block diagram similar to Figure 1.8(d) identifying the input and output
Name three applications for feedback control systems.
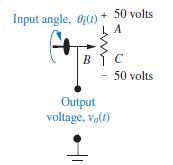
A variable resistor, called a potentiometer, is shown in Figure. The resistance is varied by moving a wiper arm along a fixed resistance. The resistance from A to C is fixed, but the resistance from B to C varies with the position of the wiper arm. If it takes 10 turns to move the wiper arm from A
Showing 900 - 1000
of 942
1
2
3
4
5
6
7
8
9
10
Step by Step Answers