New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
control systems engineering
Control Systems Engineering 7th Edition Norman S. Nise - Solutions
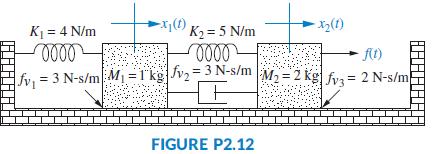
For the system of Figure P2.12 find the transfer function, G(s) = X1(s)/F(s). K = 4 N/m -Xj K, = 5 N/m ft) = 3 N-s/mM1 =T'kg Jv2=3N-s/m M2 = 2 kg fva = 2 N-s/m %3D FIGURE P2.12
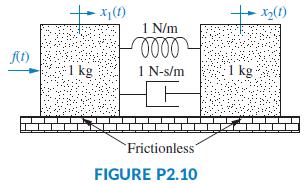
Find the transfer function, G(s) = X2(s)/F(s), for the translational mechanical network shown in Figure P2.10. X(1) X(1) 1 N/m ft) 1 kg 1 N-s/m 1 kg Frictionless" FIGURE P2.10
Find the transfer function, X3(s)/F(s), for each system shown in Figure P2.14. 13() fv = 4 N-s/mp K= 5 N/m fv = 4N-s/m f()- M, = 4 kg0000 M2 = 4 kg fvz = 4 N-s/m fv=4 N-s/m (a) X(1) Frictionless 1 N/m -x3(1) M1 = 8 kg M;=3 kg } 4 N-s/m 16 N-s/m 15 N/m Frictionless Frictionless (b) FIGURE P2.14
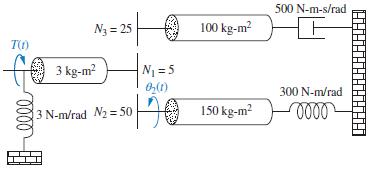
Find the transfer function, G(s) = θ2(s)/T(s), for the rotational mechanical system shown in Figure P2.22. 500 N-m-s/rad N3 = 25 100 kg-m? 3 kg-m? N1 = 5 300 N-m/rad 3 N-m/rad N2 = 50 150 kg-m?
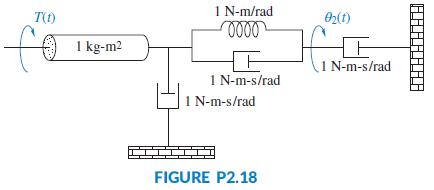
For the rotational mechanical system shown in Figure P2.18, find the transfer function G(s) = θ2(s)/T(s) 1 N-m/rad T(1t) O2(1) 1 kg-m2 1 N-m-s/rad 1 N-m-s/rad 1 N-m-s/rad FIGURE P2.18
Asystem’s output, c, is related to the system’s input, r, by the straight-line relationship, c = 5r + 7. Is the system linear?
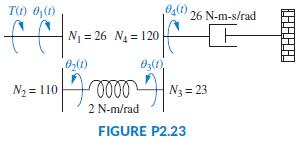
Find the transfer function, G(s) = θ4(s)/T(s), for the rotational system shown in Figure P2.23. O0) 26 N-m-s/rad N1 = 26 N4 = 120 N2 = 110 N3 = 23 2 N-m/rad FIGURE P2.23
Consider the differential equationwhere f(x) is the input and is a function of the output, x. If f (x) = sin x, linearize the differential equation for small excursions. [Section: 2.10]a. x = 0b. x = π dx dx +3 +2x =f(x) di2 dt
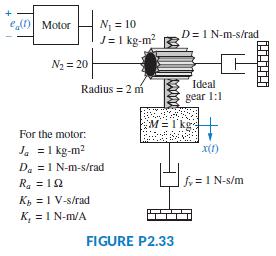
Find the transfer function, G(s) = X(s)/Ea(s), for the system shown in Figure P2.33. + e(n Motor N = 10 J= 1 kg-m? 3 D=1 N-m-s/rad N2 = 20 Radius = 2 m Ideal gear 1:1 M=I'kg For the motor: J. =1 kg-m? D. =1 N-m-s/rad x(1) R. = 12 fy =1 N-s/m K, = 1 V-s/rad K, = I N-m/A FIGURE P2.33
Consider the differential equationwhere f(x) is the input and is a function of the output, x. If f (x) = 3e-5x, linearize the differential equation for x near 0. d'x dr + 10+ dx dx + 20+ 15x = f(x) dr dt
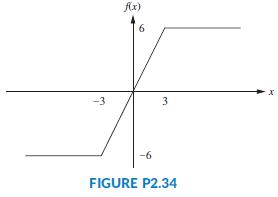
Many systems are piecewise linear. That is, over a large range of variable values, the system can be described linearly. A system with amplifier saturation is one such example. Given the differential equationassume that f(x) is as shown in Figure P2.34. Write the differential equation for each of
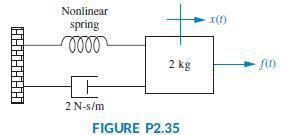
For the translational mechanical system with a nonlinear spring shown in Figure P2.35, find the transfer function, G(s) = X(s)/F(s), for small excursions around f (t) = 1. The spring is defined by xs(t) = 1 - e-fs(t), where xs(t) is the spring displacement and fs(t) is the spring force. Nonlinear
Enzymes are large proteins that biological systems use to increase the rate at which reactions occur. For example, food is usually composed of large molecules that are hard to digest; enzymes break down the large molecules into small nutrients as part of the digestive process. One such enzyme is
Humans are able to stand on two legs through a complex feedback system that includes several sensory inputs— equilibrium and visual along with muscle actuation. In order to gain a better understanding of the workings of the postural feedback mechanism, an individual is asked to stand on a
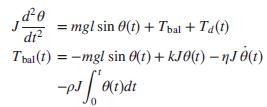
For the rotational system shown in Figure P2.24, find the transfer function, G(s) = θL(s)/T(s).Figure P2.24 2 N-m-s/rad 2 N-m/rad N2 = 20 A 1 kg-m2 E0000 N3 = 40 N1 = 5 N4= 10 0.02 N-m-s/rad
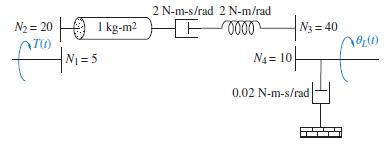
For the rotational system shown in Figure P2.25, write the equations of motion from which the transfer function, G(s) = θ1(s)/T(s), can be found.Figure P2.25 T(t) 0,(1) N J. K D N2 N3 J2 N4 JL. J4 D.
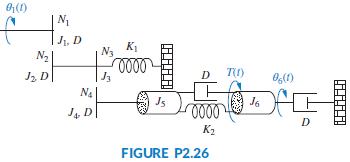
Given the rotational system shown in Figure P2.26, find the transfer function, G(s) = θ6(s)/θ1(s). J1, D N2 K1 Na Jz D N4 J6 Js 000 D K2 FIGURE P2.26
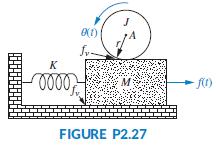
In the system shown in Figure P2.27, the inertia, J, of radius, r, is constrained to move only about the stationary axis A. A viscous damping force of translational value fv exists between the bodies J and M. If an external force, f(t), is applied to the mass, find the transfer function, G(s) =
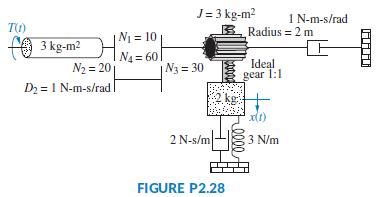
For the combined translational and rotational system shown in Figure P2.28, find the transfer function, G(s) = X(s)/T(s). J= 3 kg-m? B Radius = 2 m 1 N-m-s/rad TO) N = 10 A 3 kg-m2 N2 = 20 N4 = 60 Ideal gear 1:1 N3 = 30 D2 = 1 N-m-s/rad 2 kg x(1) 2 N-s/m 3 N/m FIGURE P2.28 ililili 0000
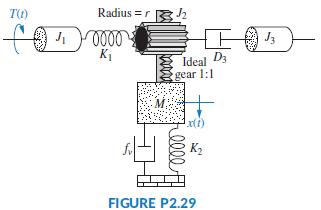
Given the combined translational and rotational system shown in Figure P2.29, find the transfer function, G(s) = X(s)/T(s). T(O) Radius = r Bh 0000 Ideal D3 gear 1:1 K2 FIGURE P2.29
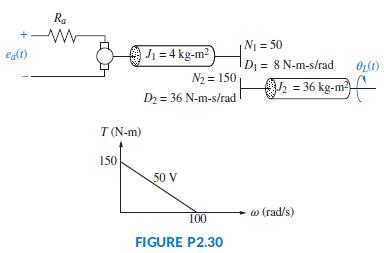
For the motor, load, and torque-speed curve shown in Figure P2.30, find the transfer function, G(s) = θL(s)/Ea(s). Ra N = 50 ea(t) J = 4 kg-m2 D = 8 N-m-s/rad N2 = 150 = 36 kg-m D2 = 36 N-m-s/rad T (N-m) 150 50 V @ (rad/s) 100 FIGURE P2.30
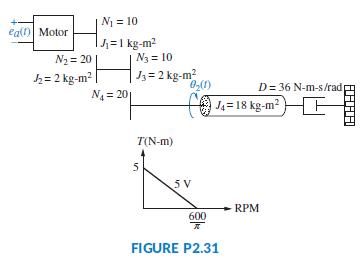
The motor whose torque-speed characteristics are shown in Figure P2.31 drives the load shown in the diagram. Some of the gears have inertia. Find the transfer function, G(s) = θ2(s)=Ea(s). N1 = 10 eall) Motor =1 kg-m2 N3 = 10 N2 = 20 J3= 2 kg-m2 h= 2 kg-m? N = 20 D= 36 N-m-s/rad t=18 kg-m² T(N-m)
A dc motor develops 55 N-m of torque at a speed of 600 rad/s when 12 volts are applied. It stalls out at this voltagewith100N-mof torque. If the inertia and damping of the armature are7kg-m2 and 3N-m-s/rad, respectively, find the transfer function, G(s) = θL(s)/Ea(s), of this motor if it
In this chapter, we derived the transfer function of a dc motor relating the angular displacement output to the armature voltage input. Often we want to control the output torque rather than the displacement. Derive the transfer function of the motor that relates output torque to input armature
How can you tell from the root locus if the settling time does not change over a region of gain?
The characteristic polynomial of a feedback control system, which is the denominator of the closed-loop transfer function, is given by s3 + 2s2 + (20K + 7)s + 100K. Sketch the root locus for this system.
How can you tell from the root locus that the natural frequency does not change over a region of gain?
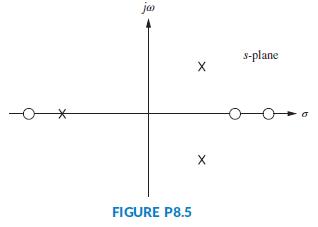
Figure P8.5 shows open-loop poles and zeros. There are two possibilities for the sketch of the root locus. Sketch each of the two possibilities. Be aware that only one can be the real locus for specific open-loop pole and zero values. ja s-plane -어 X FIGURE P8.5
How would you determine whether or not a root locus plot crossed the real axis?
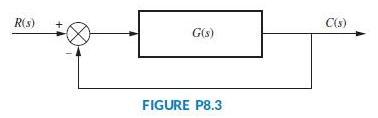
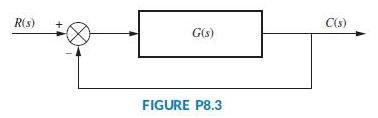
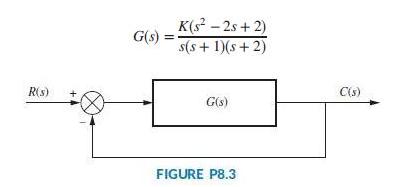
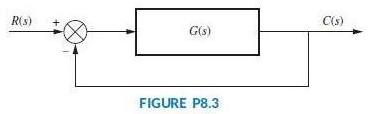
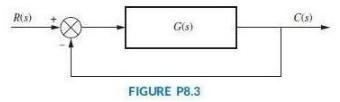
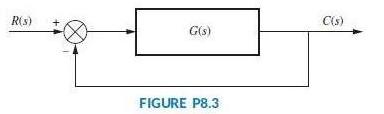
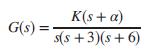
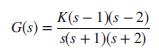
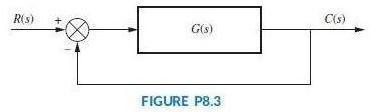
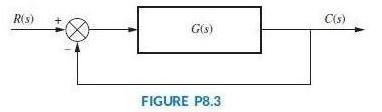
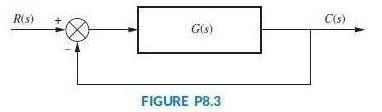
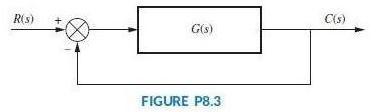
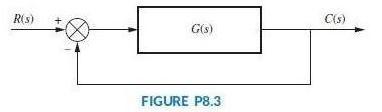
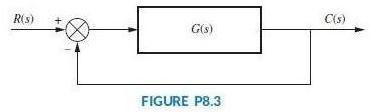
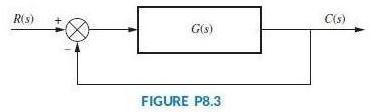
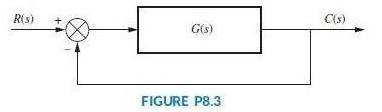
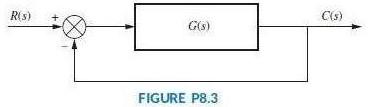
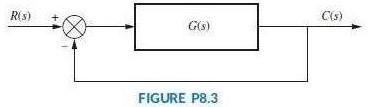
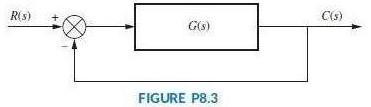
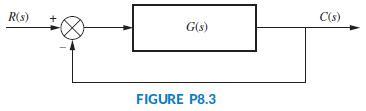
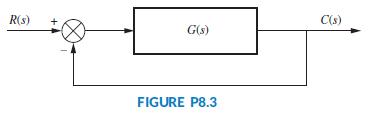
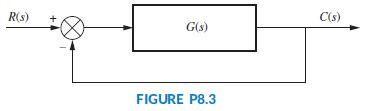
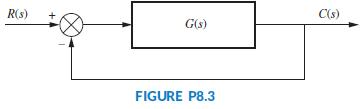
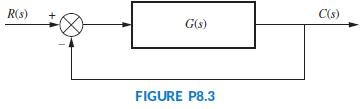
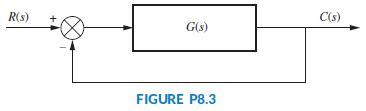
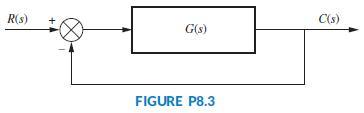
Plot the root locus for the unity feedback system shown in Figure P8.3, whereFor what range of K will the poles be in the right half-plane? K(s + 2)(s + 4) G(s) = (s+5)(s – 3)
Describe the conditions that must exist for all closed-loop poles and zeros in order to make a second-order approximation.
For the unity feedback system shown in Figure P8.3, wheresketch the root locus and tell for what values of K the system is stable and unstable. K(s-9) G(s) = (s2 +4)
What rules for plotting the root locus are the same whether the system is a positive- or a negative-feedback system?
Sketch the root locus for the unity feedback system shown in Figure P8.3, whereGive the values for all critical points of interest. Is the system ever unstable? If so, for what range of K? K(s² +2) G(s): (s+3)(s +4)
Briefly describe how the zeros of the open-loop system affect the root locus and the transient response.
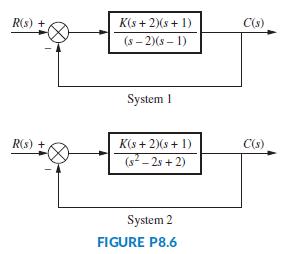
For each system shown in Figure P8.6, make an accurate plot of the root locus and find the following:a. The breakaway and break-in pointsb. The range of K to keep the system stablec. The value of K that yields a stable system with critically damped second-order polesd. The value of K that yields a
Sketch the root locus and find the range of K for stability for the unity feedback system shown in Figure P8.3 for the following conditions:a.b. K(s? + 1) G(s) (s - 1)(s+2)(s+ 3)
For the unity feedback system of Figure P8.3, wheresketch the root locus and find the range of K such that there will be only two right–half-plane poles for the closed-loop system. K(s + 5) (s2 + 1)(s – 1)(s + 3) G(s) = %3D
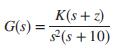
For the unity feedback system of Figure P8.3, whereplot the root locus and calibrate your plot for gain. Find all the critical points, such as breakaways, asymptotes, jω-axis crossing, and so forth. K G(s) = s(s + 5)(s + 8) %3D
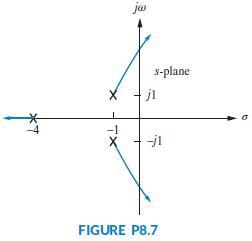
Given the root locus shown in Figure P8.7,a. Find the value of gain that will make the system marginally stable.b. Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at -5. ja s-plane X -ji FIGURE P8.7
Given the unity feedback system of Figure P8.3, make an accurate plot of the root locus for the following:a.b.Also, do the following:Calibrate the gain for at least four points for each case. Also find the breakaway points, the jω-axis crossing, and the range of gain for stability for each case.
Given the unity feedback system of Figure P8.3, wheredo the following:a. Sketch the root locus.b. Find the asymptotes.c. Find the value of gain that will make the system marginally stable.d. Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at
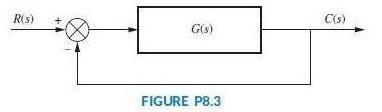
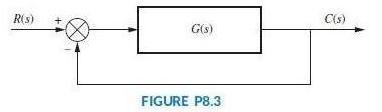
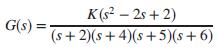
For the unity feedback system of Figure P8.3, wherefind the values of α and K that will yield a second-order closed-loop pair of poles at -1 ± j100. K(s + a) G(s) s(s +3)(s + 6)
For the unity feedback system of Figure P8.3, wheresketch the root locus and find the following:a. The breakaway and break-in pointsb. The jω-axis crossingc. The range of gain to keep the system stabled. The value of K to yield a stable system with second order complex poles, with a damping ratio
For the unity feedback system shown in Figure P8.3, wheredo the following:a. Sketch the root locus.b. Find the range of gain, K, that makes the system stable.c. Find the value of K that yields a damping ratio of 0.707 for the system’s closed-loop dominant poles.d. Find the value of K that yields
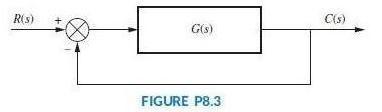
For the system of Figure P8.8(a), sketch the root locus and find the following:a. Asymptotesb. Breakaway pointsc. The range of K for stabilityd. The value of K to yield a 0.7 damping ratio for the dominant second order pairTo improve stability, we desire the root locus to cross the jω-axis at
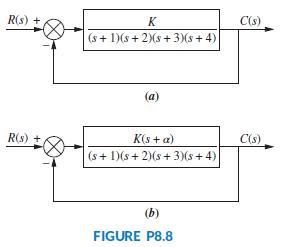
Sketch the root locus for the positive-feedback system shown in Figure P8.9. R(s) + K C(s) s(s+1) FIGURE P8.9
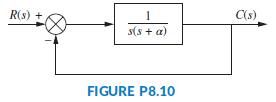
Root loci are usually plotted for variations in the gain. Sometimes we are interested in the variation of the closed-loop poles as other parameters are changed. For the system shown in Figure P8.10, sketch the root locus as α is varied. R(s) + 1 C(s) s(s + a) FIGURE P8.10
Given the unity feedback system shown in Figure P8.3, wheredo the following problem parts by first making a second-order approximation. After you are finished with all of the parts, justify your second-order approximation.a. Sketch the root locus.b. Find K for 20% overshoot.c. For K found in Part
For the unity feedback system shown in Figure P8.3, wheredo the following:a. Sketch the root locus.b. Find the asymptotes.c. Find the range of gain, K, that makes the system stable.d. Find the breakaway points.e. Find the value of K that yields a closed-loop step response with 25% overshoot.f. Find
The unity feedback system shown in Figure P8.3, whereis to be designed for minimum damping ratio. Find the following:a. The value of K that will yield minimum damping ratiob. The estimated percent overshoot for that casec. The estimated settling time and peak time for that cased. The justification
For the unity feedback system shown in Figure P8.3, wherefind K to yield closed-loop complex poles with a damping ratio of 0.55. Does your solution require a justification of a second-order approximation? Explain. K(s + 2) G(s) = %3D s(s+ 6)(s+ 10)
For the unity feedback system shown in Figure P8.3, wherefind the value of α so that the system will have a settling time of 2 seconds for large values of K. Sketch the resulting root locus. K(s +a) G(s) s(s + 2)s +6)
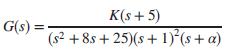
For the unity feedback system shown in Figure 8.3,wheredesign K and α so that the dominant complex poles of the closed-loop function have a damping ratio of 0.5 and a natural frequency of 1.2 rad/s. K(s + 5) G(s) = (s? + 8s + 25)(s + 1)*(s+ a) %3D
For the unity feedback system shown in Figure 8.3, wheredo the following:a. Sketch the root locus.b. Find the value of K that will yield a 10% overshoot.c. Locate all nondominant poles. What can you say about the second order approximation that led to your answer in Part b?d. Find the range of K
Repeat Problem 32 using MATLAB. Use one program to do the following:a. Display a root locus and pause.b. Draw a close-up of the root locus where the axes go from -2 to 0 on the real axis and -2 to 2 on the imaginary axis.c. Overlay the 10% overshoot line on the close-up root locus.d. Select
For the unity feedback system shown in Figure 8.3, wheredo the following: [Section: 8.7]a. Find the gain, K, to yield a 1-second peak time if one assumes a second-order approximation.b. Check the accuracy of the second-order approximation using MATLAB to simulate the system. K(s? + 4s +5) G(s) =
For the unity feedback system shown in Figure P8.3, wheredo the following:a. Sketch the root locus.b. Find the jω-axis crossing and the gain, K, at the crossing.c. Find all breakaway and break-in points.d. Find angles of departure from the complex poles.e. Find the gain, K, to yield a damping
Repeat Parts a through c and e of Problem 35 forData From Problem 35:For the unity feedback system shown in Figure P8.3, wheredo the following:a. Sketch the root locus.b. Find the jω-axis crossing and the gain, K, at the crossing.c. Find all breakaway and break-in points.d. Find angles of
For the unity feedback system shown in Figure P8.3, wheredo the following:a. Find the location of the closed-loop dominant poles if the system is operating with 15% overshoot.b. Find the gain for Part a.c. Find all other closed-loop poles.d. Evaluate the accuracy of your second-order approximation.
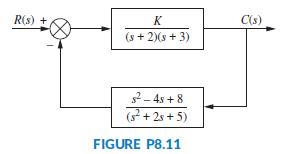
For the system shown in Figure P8.11, do the following:a. Sketch the root locus.b. Find the jω-axis crossing and the gain, K, at the crossing.c. Find the real-axis breakaway to two-decimal-place accuracy.d. Find angles of arrival to the complex zeros.e. Find the closed-loop zeros.f. Find the gain,
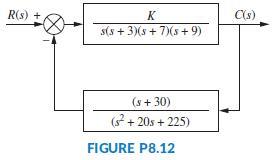
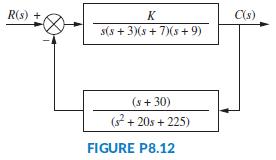
Sketch the root locus for the system of Figure P8.12 and find the following:a. The range of gain to yield stabilityb. The value of gain that will yield a damping ratio of 0.707 for the system’s dominant polesc. The value of gain that will yield closed-loop poles that are critically damped R(s) +
Repeat Problem 39 using MATLAB. The program will do the following in one program:a. Display a root locus and pause.b. Display a close-up of the root locus where the axes go from -2 to 0.5 on the real axis and -2 to 2 on the imaginary axis.c. Overlay the 0.707 damping ratio line on the close-up root
Given the unity feedback system shown in Figure P8.3 where do the following:a. If z = 2, find K so that the damped frequency of oscillation of the transient response is 5 rad/s.b. For the system of Part a, what static error constant (finite) can be specified? What is its value?c. The system is to
Given the unity feedback system shown in Figure P8.3, wherefind the following:a. The value of gain, K, that will yield a settling time of 4 secondsb. The value of gain, K, that will yield a critically damped system K G(s) = (s+ 1)(s + 3)(s+ 6)
You are given the unity-feedback system of Figure P8.3, whereUse MATLAB to plot the root locus. Use a closeup of the locus (from -5 to 0 and — 1 to 6) to find the gain, K, that yields a closed-loop unit-step response, c(t), with 20.5% overshoot and a settling time of Ts = 3 seconds. Mark on the
Letin Figure P8.3.a. Find the range of K for closed-loop stability.b. Plot the root locus for K > 0.c. Plot the root locus for K < 0.d. Assuming a step input, what value of K will result in the smallest attainable settling time?e. Calculate the system’s ess for a unit step input assuming
Given the unity feedback system shown in Figure P8.3, whereevaluate the pole sensitivity of the closed-loop system if the second-order, underdamped closed-loop poles are set fora. ζ = 0:591b. ζ = 0:456c. Which of the two previous cases has more desirable sensitivity? K G(s) = s(s +1.25)(s+ 8)
Repeat Problem 3 but sketch your root loci for negative values of K.Data From Problem 3:Sketch the root locus for the unity feedback system shown in Figure P8.3for the following transfer functions:a.b.c.d. K(s + 2)(s + 6) s2 + 8s + 25 G(s) =
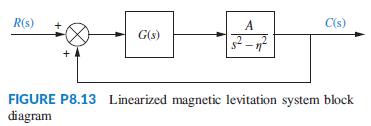
Figure P8.13 shows the block diagram of a closed loop control of a linearized magnetic levitation system (Galvão, 2003)..Assuming A = 1300 and η = 860, draw the root locus and find the range of K for closed-loop stability when:a. G(s) = K;b. R(s) A C(s) G(s) .2 FIGURE P8.13 Linearized magnetic
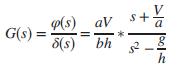
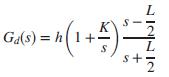
The simplified transfer function model from steering angle δ(s) to tilt angle φ(s) in a bicycle is given byIn this model, h represents the vertical distance from the center of mass to the floor, so it can be readily verified that the model is open loop unstable. (Åström, 2005). Assume that for
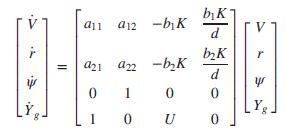
A technique to control the steering of a vehicle that follows a line located in the middle of a lane is to define a look-ahead point and measure vehicle deviations with respect to the point. A linearized model for such a vehicle iswhere V = vehicle’s lateral velocity, r = vehicle’s yaw
It is known that mammals have hormonal regulation mechanisms that help maintain almost constant calcium plasma levels (0.08–0.1 g/L in dairy cows). This control is necessary to maintain healthy functions, as calcium is responsible for diverse physiological functions, such as bone formation,
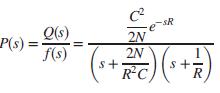
Problem 64 in Chapter 7 introduced the model of a TCP/IP router whose packet-drop probability is controlled by using a random early detection (RED) algorithm (Hollot, 2001). Using Figure P8.3 as a model, a specific router queue’s open-loop transfer function isThe function e -0.2s represents
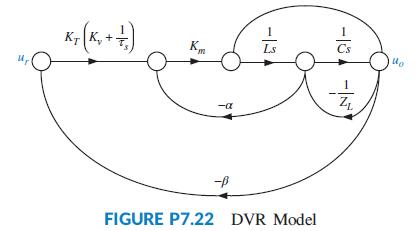
For the dynamic voltage restorer (DVR) discussed in Problem 47, Chapter 7, do the following:a. When ZL = 1/sCL, a pure capacitance, the system is more inclined toward instability. Find the system’s characteristic equation for this case.b. Using the characteristic equation found in Part a, sketch
The closed-loop vehicle response in stopping a train depends on the train’s dynamics and the driver, who is an integral part of the feedback loop. In Figure P8.3, let the input be R(s) = vr the reference velocity, and the output C(s) = v, the actual vehicle velocity. (Yamazaki, 2008) shows that
Voltage droop control is a technique in which loads are driven at lower voltages than those provided by the source. In general, the voltage is decreased as current demand increases in the load. The advantage of voltage droop is that it results in lower sensitivity to load current variations.
It has been suggested that the use of closed-loop feedback in ventilators can highly reduce mortality and health problems in patients in need of respiratory treatments (Hahn, 2012). A good knowledge of the transfer functions involved is necessary for the design of an appropriate controller. In a
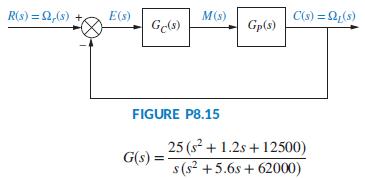
Figure P8.15 shows a simplified drawing of a feedback system that includes the drive systempresented in Problem 67, Chapter 5 (Thomsen, 2011). Referring to Figures P5.43 and P8.15, Gp(s) in Figure P8.15 is given by:Given that the controller is proportional, that is, GC(s)= KP, use MATLAB and a
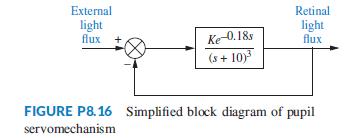
A simplified block diagram of a human pupil servomechanism is shown in Figure P8.16. The term e -0.18s represents a time delay. This function can be approximated by what is known as a Padé approximation. This approximation can take on many increasingly complicated forms, depending upon the degree
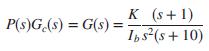
A hard disk drive (HDD) arm has an open-loop unstable transfer function,where X(s) is arm displacement and F(s) is the applied force (Yan, 2003). Assume the arm has an inertia of Ib = 3 × 10-5 kg-m2 and that a lead controller, Gc(s), is placed in cascade to yieldas in Figure P8.3.a. Plot the root
A robotic manipulator together with a cascade PI controller has a transfer function (Low, 2005)Assume the robot’s joint will be controlled in the configuration shown in Figure P8.3.a. Find the value of KI that will result in ess = 2% for a parabolic input.b. Using the value of KI found in Part a,
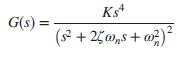
Wind turbines, such as the one shown in Figure P8.17(a), are becoming popular as a way of generating electricity. Feedback control loops are designed to control the output power of the turbine, given an input power demand. Blade-pitch control may be used as part of the control loop for a
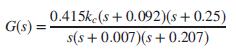
An active system for the elimination of floor vibrations due to human presence is presented in (Nyawako, 2009). The system consists of a sensor that measures the floor’s vertical acceleration and an actuator that changes the floor characteristics. The open-loop transmission of the particular
Many implantable medical devices such as pacemakers, retinal implants, deep brain stimulators, and spinal cord stimulators are powered by an in-body battery that can be charged through a transcutaneous inductive device. Optimal battery charge can be obtained when the out-of-body charging circuit is
It is important to precisely control the amount of organic fertilizer applied to a specific crop area in order to provide specific nutrient quantities and to avoid unnecessary environmental pollution. A precise delivery liquid manure machine has been developed for this purpose (Saeys, 2008). The
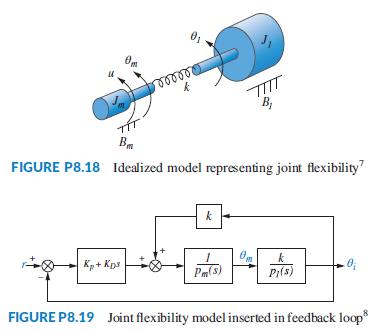
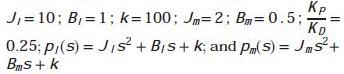
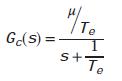
Harmonic drives are very popular for use in robotic manipulators due to their low backlash, high torque transmission, and compact size (Spong, 2006). The problem of joint flexibility is sometimes a limiting factor in achieving good performance. Consider that the idealized model representing joint
Using LabVIEW, the Control Design and Simulation Module, and the Math Script RT Module, open and customize the Interactive Root Locus VI from the Examples to implement the system of Problem 64. Select the parameter KD to meet the requirement of Problem 64 by varying the location of the closed-loop
An automatic regulator is used to control the field current of a three phase synchronous machine with identical symmetrical armature windings (Stapleton,1964). The purpose of the regulator is to maintain the system voltage constant within certain limits. The transfer function of the synchronous
It is well known that when a person ingests a significant amount of water, the blood volume increases, causing an increase in arterial blood pressure until the kidneys are able to excrete the excess volume and the pressure returns to normal (Shahin, 2010). In order to describe mathematically this
One of the treatments for Parkinson’s disease in some patients is Deep Brain Stimulation (DBS) (Davidson, 2012). In DBS a set of electrodes is surgically implanted and a vibrating current is applied to the subthalamic nucleus, also known as a brain pacemaker. Root locus has been used on a
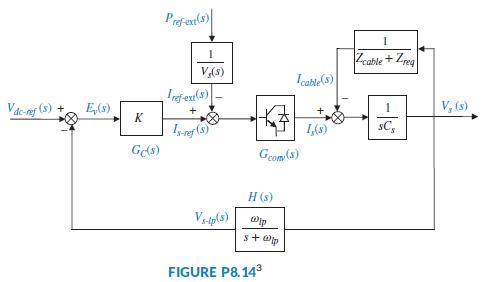
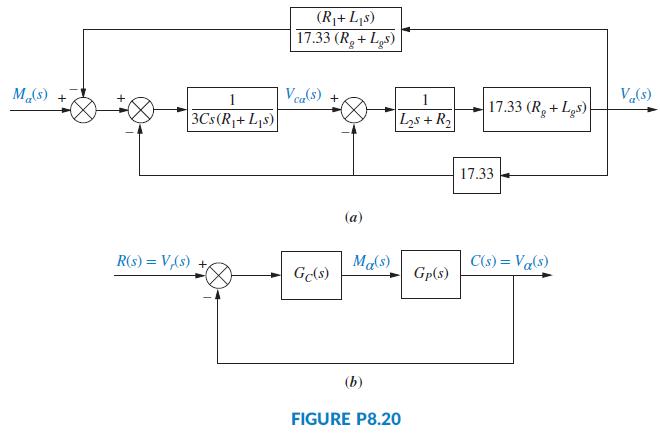
A linear dynamic model of the α-subsystem of a grid connected voltage source converter (VSC) using a Y-Y transformer is shown in Figure P8.20 (a) (Mahmood, 2012).a. Find the transfer function GP(s) = Vα(s)/Mα(s).b. If GP(s) is the plant in Figure P8.20(b) and GC(s) = K, use MATLAB to plot the
Consider the fluid temperature control of a parabolic trough collector (Camocho, 2012) embedded in the unity feedback structure as shown in Figure P8.3, where the open-loop plant transfer function is given byApproximating the time-delay term withmake a sketch of the resulting root locus. Mark where
Define the transfer function.
What transformation turns the solution of differential equations into algebraic manipulations?
What mathematical model permits easy interconnection of physical systems?
Briefly describe each of your answers to Question 15.Data From Question 15:Name three approaches to the mathematical modeling of control systems.
Name three approaches to the mathematical modeling of control systems.
Adjustments of the forward path gain can cause changes in the transient response. True or false?
Describe a typical control system design task.
Showing 800 - 900
of 942
1
2
3
4
5
6
7
8
9
10
Step by Step Answers