New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
introduction mechanical engineering
Principles Of Mechanical Engineering 1st Edition Sadhu Singh - Solutions
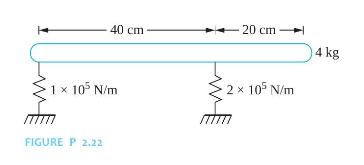
Determine the static deflections in each of the springs in the system of Figure P2.22. 40 cm 20 cm 1 x 105 N/m 2 x 105 N/m FIGURE P 2.22 4 kg
A \(30 \mathrm{~kg}\) compressor sits on four springs, each of stiffness \(1 \times 10^{4} \mathrm{~N} / \mathrm{m}\). What is the static deflection of each spring.
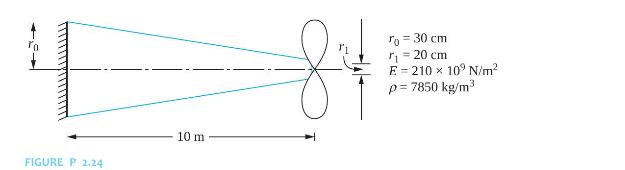
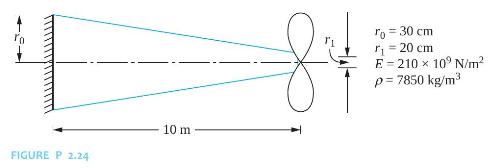
The propeller of a ship is a tapered circular cylinder, as shown in Figure P2.24. When installed in the ship, one end of the propeller is constrained from longitudinal motion relative to the ship while a \(500-\mathrm{kg}\) propeller mass is attached to its other end.(a) Determine the equivalent
(a) Determine the equivalent torsional stiffness of the propeller shaft of Problem 2.24.(b) Determine an equivalent moment of inertia of the shaft of Problem 2.24 to be placed on the end of the shaft for a SDOF model of torsional oscillations.Data From Problem 2.24:The propeller of a ship is a
A tightly wound helical coil spring is made from an \(1.88-\mathrm{mm}\) diameter bar made from 0.2 percent hardened steel ( \(\left.\mathrm{G}=80 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}, ho=7600 \mathrm{~kg} / \mathrm{m}^{3}\right)\). The spring has a coil diameter of \(1.6 \mathrm{~cm}\) with
One end of a spring of mass \(m_{s 1}\) and stiffness \(\mathrm{k}_{1}\) is connected to a fixed wall, while the other end is connected to a spring of mass \(m_{s 2}\) and stiffness \(\mathrm{k}_{2}\). The other end of the second spring is connected to a particle of mass \(m\). Determine the
A block of mass \(m\) is connected to two identical springs in series. Each spring has a mass \(\mathrm{m}\) and a stiffness \(\mathrm{k}\). Determine the equivalent mass of the two springs at the mass.
Show that the inertia effects of a torsional shaft of polar mass moment of inertia \(J\) can be approximated by adding a thin disk of moment of inertia \(J / 3\) at the end of the shaft.
Use the static displacement of a simply supported beam to determine the mass of a particle that should be added at the midspan of the beam to approximate inertia effects in the beam.
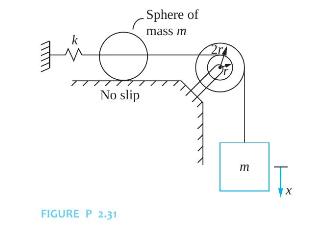
Determine the equivalent mass or equivalent moment of inertia of the system shown in Figures P2.31 when the indicated generalized coordinate is used. T No slip FIGURE P 2.31. Sphere of mass m 2r m
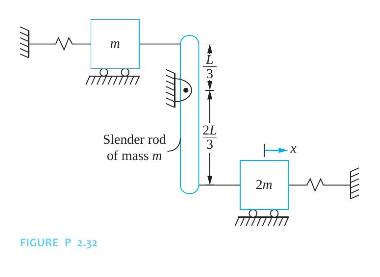
Determine the equivalent mass or equivalent moment of inertia of the system shown in Figures P2.32 when the indicated generalized coordinate is used. m fm Slender rod of mass m 2L -alm 3 FIGURE P 2.32 2m -X
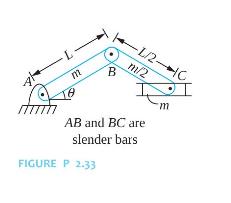
Determine the equivalent mass or equivalent moment of inertia of the system shown in Figures P2.33 when the indicated generalized coordinate is used. L m B -L/2-C m/2 AB and BC are slender bars FIGURE P 2.33 -m
Determine the equivalent mass or equivalent moment of inertia of the system shown in Figures P2.34 when the indicated generalized coordinate is used. Slender rod of mass m Rigid massless connector 4L 5 FIGURE P 2.34 Slender rod of mass m 1 m
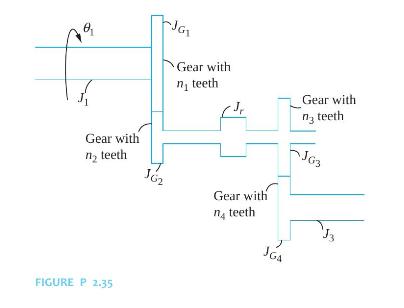
Determine the equivalent mass or equivalent moment of inertia of the system shown in Figures P2.35 when the indicated generalized coordinate is used. -JG Gear with n teeth Gear with n3 teeth JG3 Gear with Gear with n teeth 162 n4 teeth FIGURE P 2.35 JGA
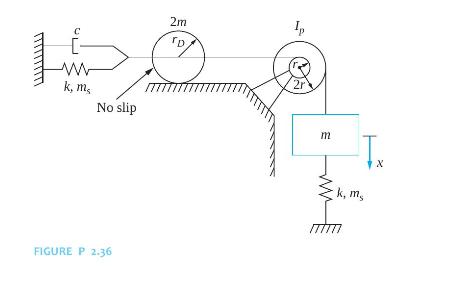
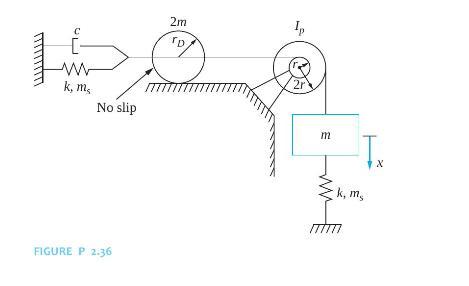
Determine the kinetic energy of the system of Figure P2.36 at an arbitrary instant in terms of \(\dot{x}\) including inertia effects of the springs. k, ms No slip FIGURE P 2.36 2m Ip TD 2r m -TX k, ms
The time-dependent displacement of the block of mass \(m\) of Figure P2.36 is \(x(t)=0.03 e^{-1.35 t} \sin (4 t) \mathrm{m}\). Determine the time-dependent force in the viscous damper if \(c=125 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\). ww k, ms No slip FIGURE P 2.36 2m 2r m k, ms X
Calculate the work done by the viscous damper of Problem 2.37 between \(t=0\) and \(t=1 \mathrm{~s}\).Data From Problem 2.37:The time-dependent displacement of the block of mass \(m\) of Figure P2.36 is \(x(t)=0.03 e^{-1.35 t} \sin (4 t) \mathrm{m}\). ww k, ms No slip FIGURE P 2.36 2m 2r m k, ms X
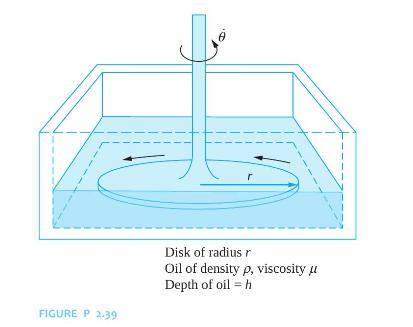
Determine the torsional viscous-damping coefficient for the torsional viscous damper of Figure P2.39. Assume a linear velocity profile between the bottom of the dish and the disk.Disk of radius \(r\)Oil of density \(ho\), viscosity \(\mu\)Depth of oil \(=h\)FIGURE P 2.39 r FIGURE P 2.39 Disk of
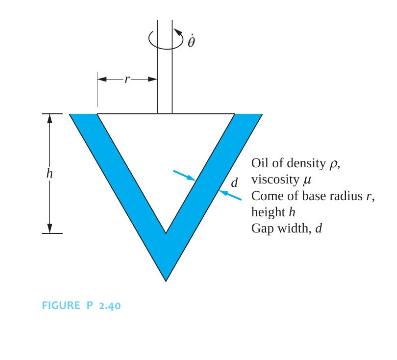
Determine the torsional viscous-damping coefficient for the torsional viscous damper of Figure P2.40. Assume a linear velocity profile in the liquid between the fixed surface and the rotating cone. h Oil of density p, d viscosity u Come of base radius r, height h Gap width, d FIGURE P 2.40
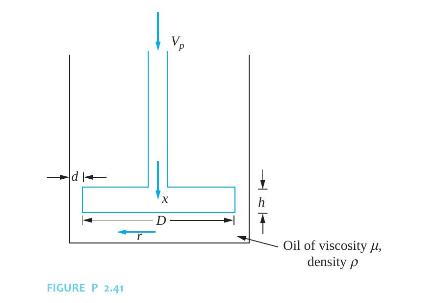
Shock absorbers and many other forms of viscous dampers use a piston moving in a cylinder of viscous liquid as illustrated in Figure P2.41. For this configuration the force developed on the piston is the sum of the viscous forces acting on the side of the piston and the force due to the pressure
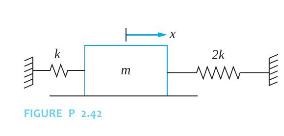
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.42. Linearize nonlinear differential equations by assuming small
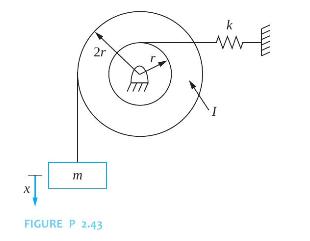
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.43. Linearize nonlinear differential equations by assuming small
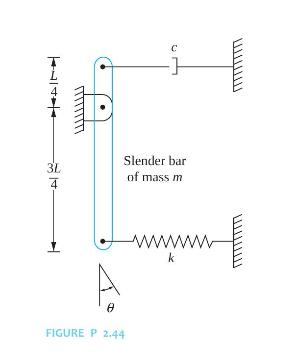
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.44. Linearize nonlinear differential equations by assuming small
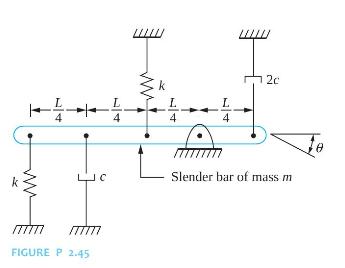
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.45. Linearize nonlinear differential equations by assuming small
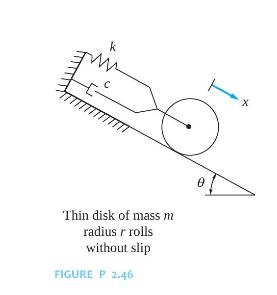
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.46. Linearize nonlinear differential equations by assuming small
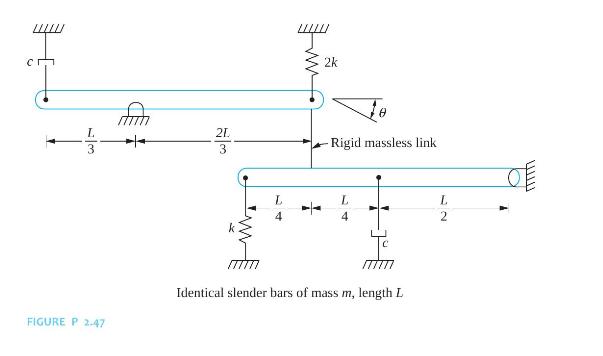
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.47. Linearize nonlinear differential equations by assuming small
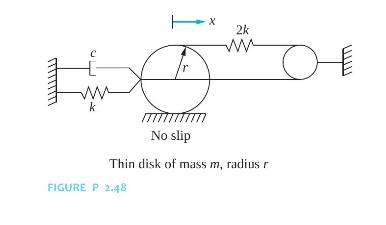
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.48. Linearize nonlinear differential equations by assuming small
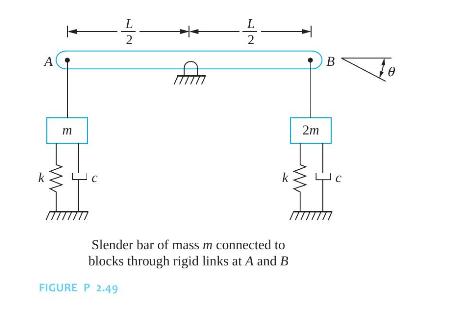
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.49. Linearize nonlinear differential equations by assuming small
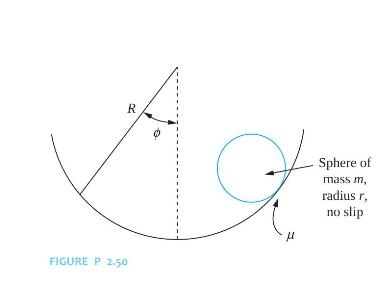
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.50. Linearize nonlinear differential equations by assuming small
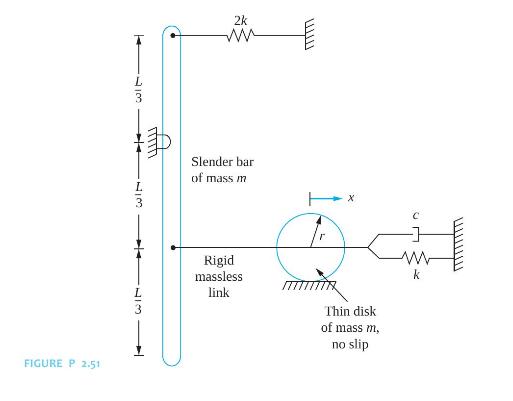
Derive the differential equation governing the motion of the one degree-of-freedom system by applying the appropriate form(s) of Newton's laws to the appropriate free-body diagrams. Use the generalized coordinate shown in Figures P2.51. Linearize nonlinear differential equations by assuming small
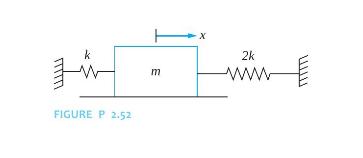
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.52. k FIGURE P 2.52 E x 2k www
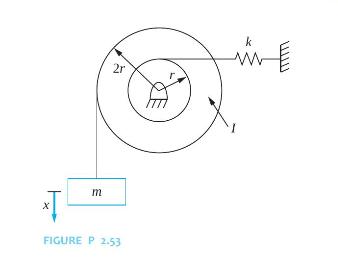
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.53. 2r k ww T m FIGURE P 2.53
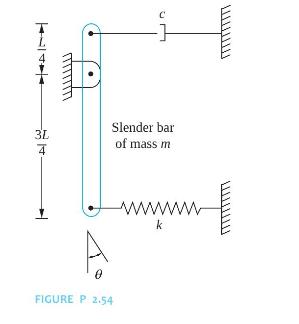
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.54. 3L - C Slender bar of mass m FIGURE P 2.54 www k
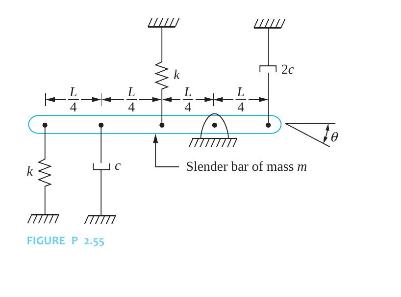
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.55. FIGURE P 2.55 C k 12c Slender bar of mass m
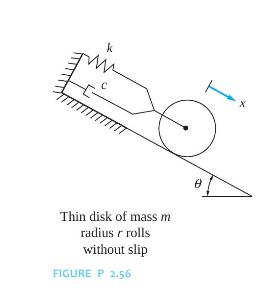
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.56. --- k Thin disk of mass m radius r rolls without slip FIGURE P 2.56 x
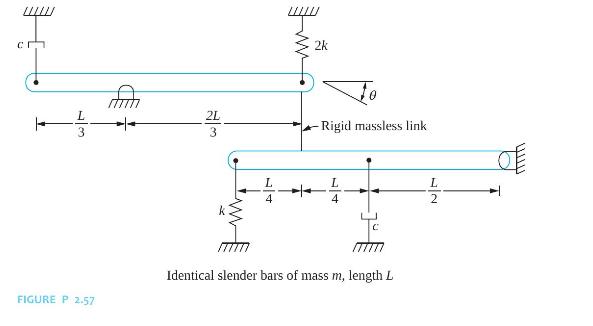
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.57. L 2k 2L 23 -Rigid massless link +1 FIGURE P 2.57 Identical slender bars of mass m, length L L 2 22
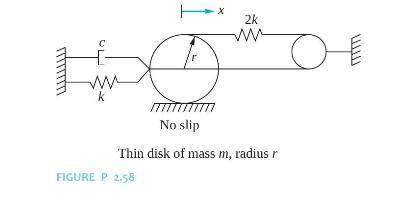
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.58. x 2k ww ww k No slip Thin disk of mass m, radius r FIGURE P 2.58
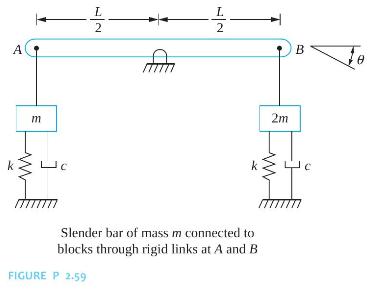
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.59. A -- mim 1 m 12 B 2m Slender bar of mass m connected to blocks through rigid links at A and B FIGURE P 2.59 C
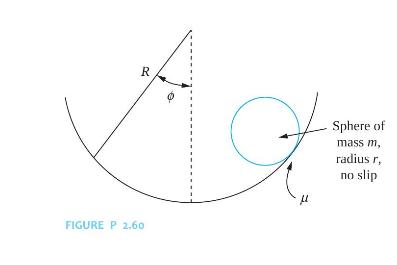
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.60. R FIGURE P 2.60 Sphere of mass m, radius r, no slip
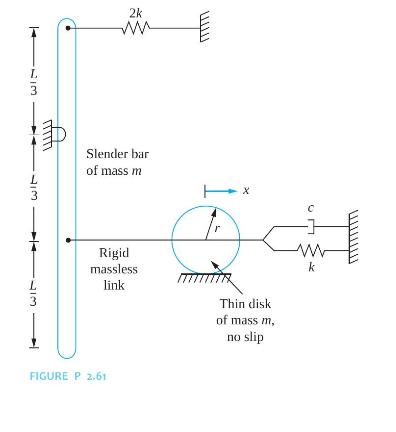
Determine the differential equations governing the motion of the system by using the equivalent systems method. Use the generalized coordinates shown in Figures P2.61. L 3 2k ww L Slender bar of mass m 113 Wil Rigid massless link Thin disk of mass m, FIGURE P 2.61 no slip k
The period of free vibration of a linear system is independent of initial conditions.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The natural frequency determined directly from the differential equation of motion has units of Hertz.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
A system with a natural frequency of \(10 \mathrm{rad} / \mathrm{s}\) has a shorter period than a system of natural frequency \(100 \mathrm{rad} / \mathrm{s}\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The free vibrations of an overdamped SDOF system are cyclic.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
An undamped SDOF system has free vibrations which are periodic.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
A system with a damping ratio of 1.2 is overdamped.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The energy lost per cycle of motion for hysteretic damping is independent of the amplitude of motion but depends upon the square of the frequency.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The energy lost per cycle of motion for underdamped free vibrations is a constant fraction of the energy present at the beginning of the cycle.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Motion eventually ceases due to viscous damping for a system with underdamped free vibrations.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
A system that has viscous damping with a damping coefficient such that it is overdamped is governed by two differential equations: one for positive velocity and another for negative velocity.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the
There is a permanent displacement from equilibrium when motion ceases for a system with Coulomb damping.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The period, measured in \(s\), is the reciprocal of the natural frequency, measured in \(\mathrm{rad} / \mathrm{s}\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The differential equation governing the free vibrations of a SDOF system with viscous damping as the only form of friction is a second-order homogeneous differential equation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it
The damping ratio for a SDOF system with viscous damping is always positive.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The amplitude of an undamped SDOF system is time dependent.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Consider the differential equation\[ \ddot{x}+2 \zeta \omega_{n} \dot{x}+\omega_{n}^{2} x=0 \]Define in words and in terms of system parameters \(m\), \(c\), and \(k\) for (a) \(\omega_{n}\) and (b) \(\zeta\).
A critically damped system has a natural frequency of \(10 \mathrm{rad} / \mathrm{s}\). Which of the following sets of initial conditions leads to the system overshooting the equilibrium position?(a) \(x_{0}=1 \mathrm{~mm}, \dot{x}_{0}=0 \mathrm{~m} / \mathrm{s}\)(b) \(x_{0}=0 \mathrm{~mm},
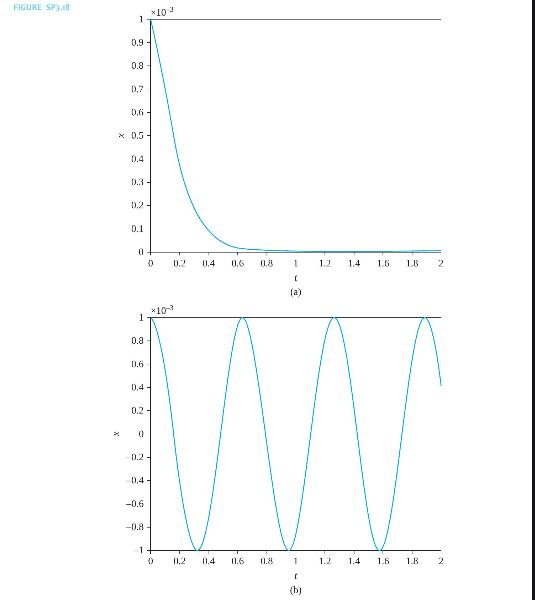
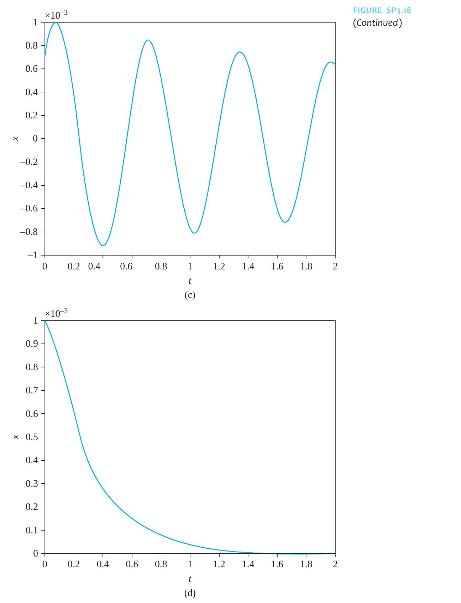
Systems with a mass of \(1 \mathrm{~kg}\) and stiffness of \(100 \mathrm{~N} / \mathrm{m}\) are given an initial displacement of \(1 \mathrm{~mm}\) and released form rest. Match the plot of system displacement, shown in Figure SP3.18 on the next page, with the system that is (a) undamped, (b)
List four differences between the free vibrations of an underdamped system and a system with Coulomb damping.
An underdamped system is given an initial displacement and released from rest. The amplitudes of motion on successive cyclers form a (an) series.
A system with Coulomb damping is given an initial displacement and released from rest. The amplitudes of motion on successive cycles form a (an) series.
Identify the following equation and every parameter\[ x(t)=A \sin \left(\omega_{n} t+\phi\right) \]
Explain the concept of hysteresis? What is the area under a hysteresis cycle?
Why can't the concept of logarithmic decrement be used to measure viscous damping ratios greater than or equal to one. FIGURE SP3.18 *10 1 0.9- x 0.8 0.7 D.6- x0.5- 0.4 0.3- 0.2- 0.1 0 0 0.2 0.4 0.6 0.8 1 1.2 1.4 16 1.8 2 [ (a) 10 1 0.8 D.6 0.4- 0.2- 0 -0.2- 0,4- -0.6 -0.8- 1 0 01.2 01.4 0.6 18 1
When given the same initial conditions a system that is critically damped returns to equilibrium faster than the same system that is overdamped. Why?
Two systems have the same stiffness and viscous damping coefficient, but one has an equivalent mass of \(2 \mathrm{~kg}\), the other has an equivalent mass of \(3 \mathrm{~kg}\). Which system has a higher damping ratio. Why? x 0.8 0.6 0,4 1 0.2- 103 FIGURE SP3.18 (Continued) 0- -0.2 0.4- D.6- -0.8
A system with viscous damping has a (longer or shorter) period of free vibration than the corresponding undamped system. Why?
What are the two initial conditions which must be formulated for a SDOF system?
What are the initial conditions for a mass-spring-viscous damper system that is released from rest with an initial displacement \(\delta\).
What are the initial conditions for a mass-spring-viscous damper system subject to an impulse of magnitude \(I\) when in equilibrium?
What is meant by the term total energy?
Describe the process by which aerodynamic drag is modeled by viscous damping with an equivalent damping coefficient.
A pendulum consists of a particle of mass \(m\) along a massless rod that is pinned at the upper end of the rod. To lengthen the period of the pendulum should the mass be moved closer to the pin support of farther away?
A mass \(m\) is attached to a spring of stiffness \(k_{1}\) given an initial displacement and released to slide on a surface. The number of cycles executed is recorded. The same mass \(m\) is attached to a spring of stiffness \(k_{2}>k_{1}\). Do you predict that the number of cycles executed by the
A mass \(m\) is attached to a spring of stiffness \(k_{1}\) and viscous damper of damping coefficient \(c_{1}\) in parallel. The mass is given an initial displacement and released. The natural frequency of vibration is observed. The same mass is attached to another spring of stiffness
The free vibrations of a system are governed by the differential equation \[ 2 \ddot{x}+40 \dot{x}+1800 x=0 \]with initial conditions \(x(0)=0.001 \mathrm{~m}\) and \(\dot{x}(0)=3 \mathrm{~m} / \mathrm{s}\). Calculate or specify the following.(a) The natural frequency, \(\omega_{n}\)(b) The
Repeat Short Problem 3.36 for the differential equation \[ 2 \ddot{x}+600 \dot{x}+9800 x=0 \]subject to \(x(0)=0.001 \mathrm{~m}\) and \(\dot{x}(0)=3 \mathrm{~m} / \mathrm{s}\).Data From Short Problem 3.36:The free vibrations of a system are governed by the differential equation \[ 2 \ddot{x}+40
The free vibrations of a system are governed by\[ 2 \ddot{x}+1800 x= \begin{cases}3 & \dot{x}0\end{cases} \]with \(x(0)=0.02 \mathrm{~m}\) and \(\dot{x}(0)=0\). Calculate or specify the following.(a) The period of motion(b) The change in amplitude per cycle of motion(c) The permanent displacement
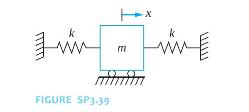
What is the natural frequency of the system shown when a SDOF model is used? k www E FIGURE SP3-39 X k WWE
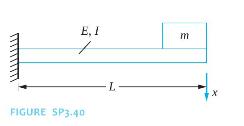
What is the natural frequency of the system shown when a SDOF model is used? E, I m FIGURE SP3.40 L
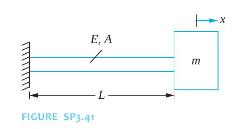
What is the natural frequency of the system shown when a SDOF model is used? E, A + m FIGURE SP3-41 L -x
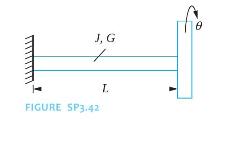
What is the natural frequency of the system shown when a SDOF model is used? J, G + FIGURE SP3.42) T.
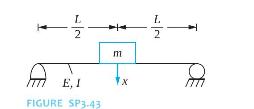
What is the natural frequency of the system shown when a SDOF model is used? L 2 EI FIGURE SP3-43 m x L 22
A mass of \(12 \mathrm{~kg}\) is attached to two springs each of stiffness \(4000 \mathrm{~N} / \mathrm{m}\) and mounted in parallel. What is the natural frequency of the system?
A mass of \(30 \mathrm{~g}\) is attached to a spring of stiffness \(150 \mathrm{~N} / \mathrm{m}\) in parallel with a viscous damper. What is the damping coefficient such that the system is critically damped?
When an engine with a mass of \(400 \mathrm{~kg}\) is mounted on an elastic foundation, the foundation deflects \(5 \mathrm{~mm}\). What is the natural frequency of the system?
A \(2 \mathrm{~kg}\) mass is connected to a spring with a stiffness of \(1000 \mathrm{~N} / \mathrm{m}\). When given an initial displacement of \(25 \mathrm{~mm}\), the area under the hysteresis curve of the spring is measured as \(0.06 \mathrm{~N} \cdot \mathrm{m}\). What is the equivalent viscous
What is the response of a system with a equivalent mass of \(0.5 \mathrm{~kg}\) and a natural frequency of \(100 \mathrm{rad} / \mathrm{s}\) that has a hysteretic damping coefficient of 0.06 to an initial velocity of \(2 \mathrm{~m} / \mathrm{s}\) ?
Match the quantity with the appropriate units (units may used more than once, some units may not be used).(a) The natural frequency, \(\omega_n\)(i) \(\mathrm{N} \cdot \mathrm{m}\)(b) The damping ratio, \(\zeta\)(ii) \(\mathrm{rad}\)(c) Damped natural frequency, \(\omega_d\)(iii) None(d)
A system is a finite quantity of matter. State True (T) or False (F)
For a system to be in thermodynamic equilibrium, velocity gradient may exist. State True (T) or False (F)
The property of a system depends upon its state. State True (T) or False (F)
Intensive properties do not depend on the mass of the system. State True (T) or False (F)
Extensive properties depend on the mass of the system. State True (T) or False (F)
A process occurs when the system undergoes a change in state. State True (T) or False (F)
In a reversible process, initial and final states of the system are same. State True (T) or False (F)
In a closed system, mass does not remain constant. State True (T) or False (F)
A rubber balloon filled with air represents a closed system. State True (T) or False (F)
A nozzle represents an open system. State True (T) or False (F)
A thermos flask is an example of isolated system. State True (T) or False (F)
Showing 2100 - 2200
of 4547
First
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
Last
Step by Step Answers