New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
introduction mechanical engineering
Mechanical Vibrations Theory And Applications 1st Edition S. GRAHAM KELLY - Solutions
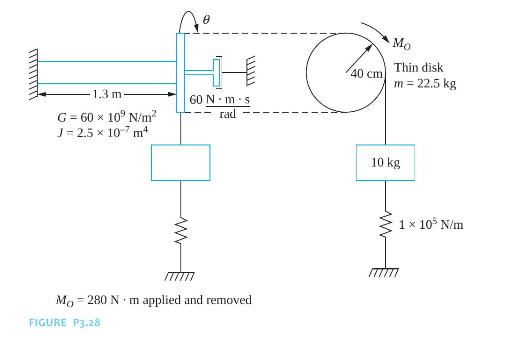
For the systems shown in Figures P3.28.(a) Determine the damping ratio (b) State whether the system is underdamped, critically damped, or overdamped (c) Determine \(x(t)\) or \(\theta(t)\) for the given initial conditions 1.3 m G = 60 109 N/m J-2.5 10-7 m Mo Thin disk 40 cm m = 22.5 kg 60 N m s
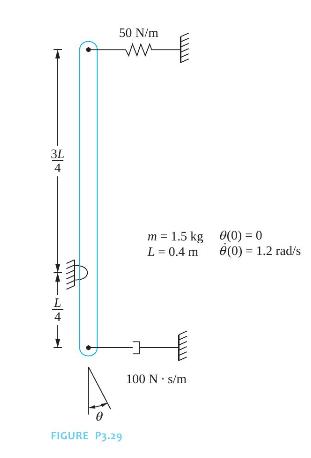
For the systems shown in Figures P3.29.(a) Determine the damping ratio (b) State whether the system is underdamped, critically damped, or overdamped (c) Determine \(x(t)\) or \(\theta(t)\) for the given initial conditions 3L 4 50 N/m Am = m 1.5 kg L = 0.4 m (0) = 0 8(0) -1.2 rad/s 100 N. s/m
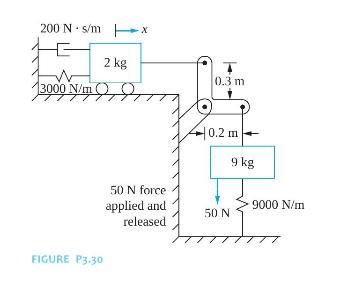
For the systems shown in Figures P3.30.(a) Determine the damping ratio (b) State whether the system is underdamped, critically damped, or overdamped (c) Determine \(x(t)\) or \(\theta(t)\) for the given initial conditions 200 N s/m x 2 kg 3000 N/m OO FIGURE P3.30 50 N force applied and released 0.3
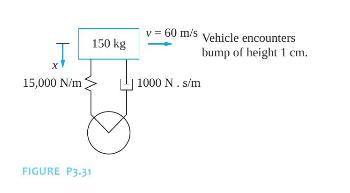
For the systems shown in Figures P3.31.(a) Determine the damping ratio (b) State whether the system is underdamped, critically damped, or overdamped (c) Determine \(x(t)\) or \(\theta(t)\) for the given initial conditions 15,000 N/m FIGURE P3-31 v = 60 m/s Vehicle encounters 150 kg +1000 1000 N.
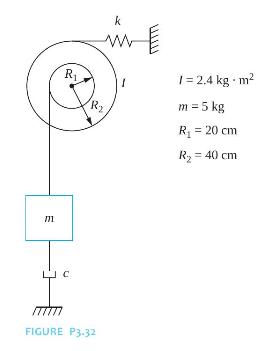
The amplitude of vibration of the system of Figure P3.32 decays to half of its initial value in 11 cycles with a period of \(0.3 \mathrm{~s}\). Determine the spring stiffness and the viscous damping coefficient. R E k R FIGURE P3-32 1=2.4 kg-m m = 5 kg R = 20 cm R = 40 cm
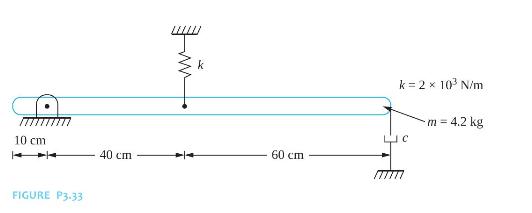
The damping ratio of the system of Figure P3.33 is 0.3 . How long will it take for the amplitude of free oscillation to be reduced to 2 percent of its initial value? k = 2 10 N/m m = 4.2 kg C 10 cm 60 cm 40 cm FIGURE P3.33
When a \(40-\mathrm{kg}\) machine is placed on an elastic foundation, its free vibrations appear to decay exponentially with a frequency of \(91.7 \mathrm{rad} / \mathrm{s}\). When a \(60-\mathrm{kg}\) machine is placed on the same foundation, the frequency of the exponentially decaying
A suspension system is being designed for a \(1300-\mathrm{kg}\) vehicle. When the vehicle is empty, its static deflection is measured as \(2.5 \mathrm{~mm}\). It is estimated that the largest cargo carried by the vehicle will be \(1000 \mathrm{~kg}\). What is the minimum value of the damping
During operation a \(500-\mathrm{kg}\) press machine is subject to an impulse of magnitude \(5000 \mathrm{~N} \cdot \mathrm{s}\). The machine is mounted on an elastic foundation that can be modeled as a spring of stiffness \(8 \times 10^{5} \mathrm{~N} / \mathrm{m}\) in parallel with a viscous
For the press of Chapter Problem 3.36, determine(a) the force transmitted to the floor as a function of time,(b) the time at which the maximum transmitted force occurs, and(c) the value of the maximum transmitted force.Data From Chapter Problem 3.36:During operation a \(500-\mathrm{kg}\) press
Repeat Chapter Problem 3.37 if the system has the same mass and stiffness but it is designed to be overdamped with a damping ratio of 1.3.Data From Chapter Problem 3.37:For the press of Chapter Problem 3.36, determine(a) the force transmitted to the floor as a function of time,(b) the time at which
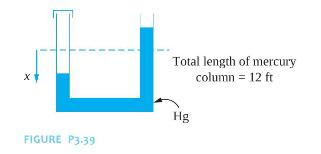
One end of the mercury filled U-tube manometer of Figure P3.39 is open to the atmosphere while the other end is capped an under a pressure of 20 psig. The cap is suddenly removed.(a) Determine \(x(t)\) as the displacement of the mercury-air interface from the column's equilibrium position if the
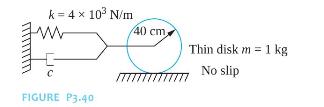
The disk of Figure P3.40 rolls without slip.(a) What is the critical damping coefficient, \(c_{c}\), for the system?(b) If \(c=c_{c} / 2\), plot the response of the system when the center of the disk is displaced \(5 \mathrm{~mm}\) from equilibrium and released from rest.(c) Repeat part (b) if
A recoil mechanism of a gun is designed as a spring and viscous damper in parallel such that the system has critical damping. A \(52-\mathrm{kg}\) cannon has a maximum recoil of \(50 \mathrm{~cm}\) after firing. Specify the stiffness and damping coefficient of the recoil mechanism such that the
The initial recoil velocity of a \(1.4-\mathrm{kg}\) gun is \(2.5 \mathrm{~m} / \mathrm{s}\). Design a recoil mechanism that is critically damped such that the mechanism returns to within \(0.5 \mathrm{~mm}\) of firing within \(0.5 \mathrm{~s}\) after firing.
A railroad bumper is modeled as a linear spring in parallel with a viscous damper. What is the damping coefficient of a bumper of stiffness \(2 \times 10^{5} \mathrm{~N} / \mathrm{m}\) such that the system has a damping ratio of 1.15 when it is engaged by a 22,000-kg railroad car.
Plot the responses of the bumper of Chapter Problem 3.43 when it is engaged by railroad cars traveling at \(20 \mathrm{~m} / \mathrm{s}\) when the mass of the railroad car is(a) \(1500 \mathrm{~kg}\),(b) \(22,000 \mathrm{~kg}\), and(c) \(30000 \mathrm{~kg}\).Data From Chapter Problem 3.43:A
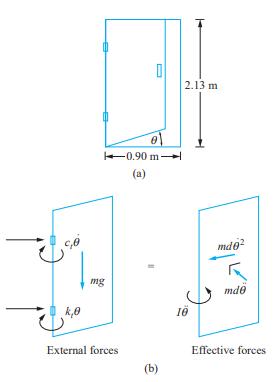
Reconsider the restroom door of Example 3.9. The man, instead of kicking the door, pushes it so that it opens to \(80^{\circ}\) and then lets go. How long will it take the door after he lets go to close to within \(5^{\circ}\) of being shut if it is designed(a) with critical damping and(b) with a
A block of mass \(m\) is attached to a spring of stiffness \(k\) and slides on a horizontal surface with a coefficient of friction \(\mu\). At some time \(t\), the velocity is zero and the block is displaced a distance \(\delta\) from equilibrium. Use the principle of work-energy to calculate the
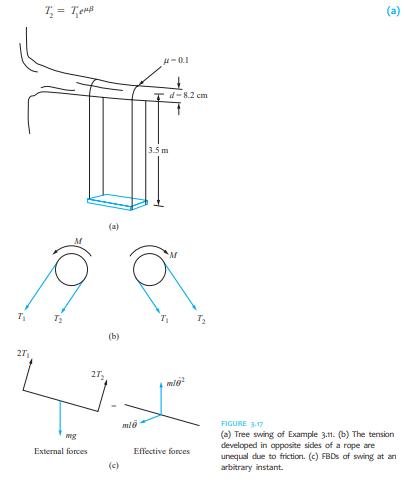
Reconsider Example 3.11 using a work-energy analysis. That is, assume the amplitude of the swing is \(\theta\) at the end of an arbitrary cycle. Use the principle of work-energy to determine the amplitude at the end of the next half-cycle.Data From Example 3.11:A father builds a swing for his
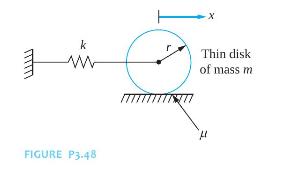
The center of the thin disk of Figure P3.48 is displaced a distance \(\delta\) and the disk released. The coefficient of friction between the disk and the surface is \(\mu\). The initial displacement is sufficient to cause the disk to roll and slip.(a) Derive the differential equation governing the
A \(10-\mathrm{kg}\) block is attached to a spring of stiffness \(3 \times 10^{4} \mathrm{~N} / \mathrm{m}\). The block slides on a horizontal surface with a coefficient of friction of 0.2 . The block is displaced \(30 \mathrm{~mm}\) and released. How long will it take before the block returns to
The block of Chapter Problem 3.49 is displaced \(30 \mathrm{~mm}\) and released. What is the range of values of the coefficient of friction such that the block comes to rest during the 14 th cycle?Data From Chapter Problem 3.49:A \(10-\mathrm{kg}\) block is attached to a spring of stiffness \(3
A 2.2-kg block is attached to a spring of stiffness \(1000 \mathrm{~N} / \mathrm{m}\) and slides on a surface that makes an angle of \(7^{\circ}\) with the horizontal. When displaced from equilibrium and released, the decrease in amplitude per cycle of motion is observed to be \(2 \mathrm{~mm}\).
A block of mass \(m\) is attached to a spring of stiffness \(k\) and viscous damper of damping coefficient \(c\) and slides on a horizontal surface with a coefficient of friction \(\mu\). Let \(x(t)\) represent the displacement of the block from equilibrium.(a) Derive the differential equation
A connecting rod is fitted around a cylinder with a connecting rod between the cylinder and bearing. The coefficient of friction between the cylinder and bearing is 0.08 . If the rod is rotated \(12^{\circ}\) counterclockwise and then released, how many cycles of motion will it execute before it
A one-degree-of-freedom structure has a mass of \(65 \mathrm{~kg}\) and a stiffness of \(238 \mathrm{~N} / \mathrm{m}\). After 10 cycles of motion the amplitude of free vibrations is decreased by 75 percent. Calculate the hysteretic damping coefficient and the total energy lost during the first 10
The end of a steel cantilever beam \(\left(E=210 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\right)\) of \(I=1.5 \times 10^{-4} \mathrm{~m}^{4}\) is given an initial amplitude of \(4.5 \mathrm{~mm}\). After 20 cycles of motion the amplitude is observed as \(3.7 \mathrm{~mm}\). Determine the
A 500-kg press is placed at the midspan of a simply supported beam of length \(3 \mathrm{~m}\), elastic modulus \(200 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\), and cross-sectional moment of inertia \(1.83 \times 10^{-5} \mathrm{~m}^{4}\). It is observed that free vibrations of the beam decay to
Derive the equivalent viscous damping coefficient for Coulomb damping. Compare the response of a one-degree-offreedom system of natural frequency \(35 \mathrm{rad} / \mathrm{s}\) and friction coefficient 0.12 using the exact theory to that obtained using the approximate theory with an equivalent
A \(0.5-\mathrm{kg}\) sphere is attached to a spring of stiffness \(6000 \mathrm{~N}\). The sphere is given an initial displacement of \(8 \mathrm{~mm}\) from its equilibrium position and released. If aerodynamic drag is the only source of friction, how many cycles will the system execute before
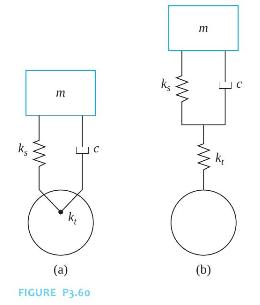
A one-degree-of-freedom model of a suspension system is shown in Figure P3.60(a). For this model the mass of the vehicle is much greater than the axle mass, but the tire has characteristics which should be included in the analysis. In the model of Figure P3.60(b), the tire is assumed to be elastic
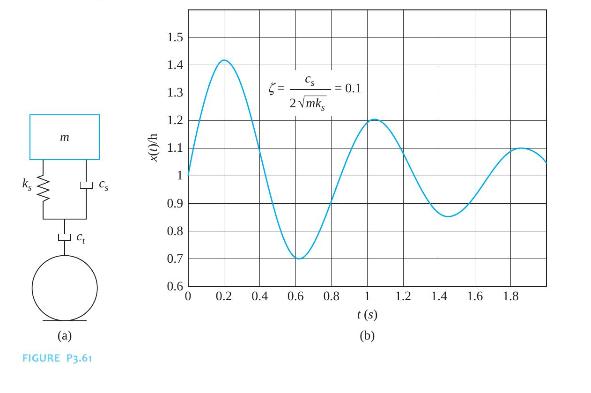
A one-degree-of-freedom model of a suspension system is shown in Figure P3.61(a). Consider a model in which the tire is modeled by a viscous damper of damping coefficient \(c_{t}\) and is placed in series with the spring and viscous damper modeling the suspension system, as illustrated in Figure
The steady-state response of a linear SDOF system occurs at the same frequency as the excitation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Beating is characterized by a continual build-up of amplitude.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The amplitude of a machine subject to a rotating unbalance approaches one for large frequencies.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
An increase in damping leads to an increase in the percentage of isolation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The phase angle for an undamped system is always \(\pi\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The phase angle depends upon \(F_{0}\), which is the amplitude of excitation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
If \(\phi\) is positive in the equation \(x(t)=X \sin (\omega t-\phi)\), the response lags the excitation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
\(\quad M(r, \zeta)\) approaches 0 for large \(r\) for all values of \(\zeta\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
\(\quad \Lambda(r, \zeta)\) approaches 0 for large \(r\) for all values of \(\zeta\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
\(T(r, \zeta)\) approaches 1 for large \(r\) for all values of \(\zeta\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The amplitude of the response of a system relative to the motion of its base is given by \(R(r, \zeta)\) if the base is subject to a single-frequency harmonic excitation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The phase angle for the response of a system with Coulomb damping is independent of the frequency of excitation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The equation for the response of a system with hysteretic damping is nonlinear in general but is linear when the system is subject to a single-frequency excitation.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
A seismometer actually measures the displacement of the seismic mass relative to the displacement of the body the instrument is set up to measure.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Hysteretic damping can be modeled using a differential equation with a complex stiffness.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.\(M(r, \zeta)\) has a maximum when \(\zeta
Explain why resonance occurs for undamped systems when the natural frequency coincides with the excitation frequency.
Why doesn't the amplitude grow unbounded when the frequency of excitation coincides with the natural frequency for systems with viscous damping?
For an undamped system, when is the response out of phase with the excitation?
In the equation \(x(t)=X \sin (\omega t-\phi)\), when is \(\phi\) negative?
How many real positive values of \(r\) satisfy the following.(a) \(M(r, 0.3)>3\)(b) \(M(r, 0.8)=1.2\)(c) \(M(r, 0.1)=1.3\)
How many real positive values of \(r\) satisfy the following.(a) \(\Lambda(r, 0)=1\)(b) \(\Lambda(r, 0.1)=1.5\)(c) \(\Lambda(r, 0.9)=1.3\)(d) \(\Lambda(r, 0.3)
How many real positive values of \(r\) satisfy the following.(a) \(T(r, 0.1)=1\)(b) \(T(r, 0.5)=0.5\)(c) \(T(r, 0)=3\)
How many real positive values of \(r\) satisfy the following.(a) \(\frac{d R}{d r}(r, 0.05)=0\)(b) \(\frac{d R}{d r}(r, 0.4)=0\)(c) \(\frac{d R}{d r}(r, 0.8)=0\)
Explain the concept of frequency response.
How is frequency response determined for a machine with a rotating unbalance?
How is frequency response determined for the motion of a machine on a moveable foundation?
Explain why vibration isolation is difficult at low speeds.
What is percentage isolation?
Explain why protecting a foundation from large forces generated by a machine is similar to protecting a body from large accelerations by its base.
Seismometers have a natural frequency and thus operate only for frequency ratios.
Explain the concept of phase distortion. Why is it a problem for accelerometers and not seismometers?
Explain the principle of linear superposition and how it applies to systems with multiple frequency input.
Why does the principle of linear superposition apply to general periodic input?
Explain the concept of stick-slip.
What are the limitations on \(\iota\), which is the nondimensional value of the ratio of the force causing Coulomb friction to the amplitude of the excitation force?
Why is viscous damping used in vibration isolation, since it has a negative effect on vibration isolation?
Does a steady-state response of the differential equation exist for the following?(a) \(3 \ddot{x}+2700 x=20 \sin 30 t\)(b) \(3 \ddot{x}+40 \dot{x}+2700 x=20 \sin 30 t\)(c) \(3 \ddot{x}+2700 x=20 \sin 10 t\)
Find all real positive values of \(r\) that satisfy the following.(a) \(M(r, 0)=1.4\)(b) \(M(r, 0.4)>3\)(c) \(M(r, 0.8)
Find all positive values of \(r\) that satisfy the following.(a) \(T(r, 0.1)1\)(c) \(T(r, 0.4)>T(r, 0.3)\)
A machine with a mass of \(30 \mathrm{~kg}\) is operating at a frequency of \(60 \mathrm{rad} / \mathrm{s}\). What equivalent stiffness of the machine's mounting leads to resonance?
An undamped SDOF system with a natural frequency of \(98 \mathrm{rad} / \mathrm{s}\) is subject to a excitation of frequency \(100 \mathrm{rad} / \mathrm{s}\). (a) What is the period of response? (b) What is the period of beating?
A machine operates at \(100 \mathrm{rad} / \mathrm{s}\) and has a rotating component of mass \(5 \mathrm{~kg}\) whose center of mass is \(3 \mathrm{~cm}\) from the axis of rotation. What is the amplitude of the harmonic excitation experienced by the machine?
Convert \(1000 \mathrm{rpm}\) to \(\mathrm{rad} / \mathrm{s}\).
A machine is subject to a harmonic excitation with an amplitude of \(15,000 \mathrm{~N}\). The force transmitted to the floor through an isolator has an amplitude of \(3000 \mathrm{~N}\). What percentage isolation is achieved by the isolator?
A \(50 \mathrm{~kg}\) machine is mounted on an isolator with a stiffness of \(6 \times 10^{5} \mathrm{~N} / \mathrm{m}\). During operation, the machine is subject to a harmonic excitation with a frequency of \(140 \mathrm{rad} / \mathrm{s}\). (a) What is the frequency ratio? (b) Does this isolator
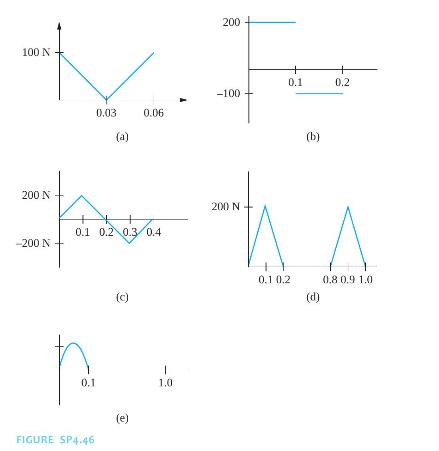
Recall that the Fourier series representation of a periodic function is\(F=\frac{a_{0}}{2}+\sum_{i=1}^{\infty}\left(a_{i} \cos \omega_{i} t+b_{i} \sin \omega_{i} t\right)\)Describe which of the Fourier coefficients \(\left(a_{0}, a_{i}, b_{i}\right.\), or none) are zero for each of the functions
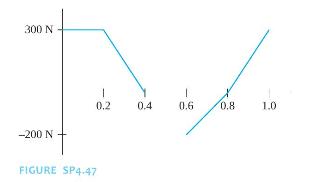
Draw the function that the Fourier series representation of the function shown in Figure SP4. 47 converges to on the interval \([-5,5]\). 300 N 0.2 0.4 0.6 0.8 1.0 -200 N FIGURE SP4-47
What is the largest frequency whose vibrations can be measured by an undamped accelerometer of natural frequency \(200 \mathrm{rad} / \mathrm{s}\) if the error is no more than 1 percent?
What is the smallest frequency whose vibrations can be measured by an undamped seismometer of natural frequency \(20 \mathrm{rad} / \mathrm{s}\) if the error is no more than 1.5 percent?
Find the steady-state solution of the differential equation.\(3 \ddot{x}+2700 x=20 \sin 10 t\)
Find the steady-state solution of the differential equation.\(3 \ddot{x}+2700 x=20 \sin 60 t\)
Find the steady-state solution of the differential equation.\( \quad 3 \ddot{x}+30 \dot{x}+2700 x=20 \sin 10 t\)
Find the steady-state solution of the differential equation.\(3 \ddot{x}+30 \dot{x}+2700 x=0.01 \omega^{2} \sin \omega t\)
Find the steady-state solution of the differential equation.\(3 \ddot{x}+30 \dot{x}+2700 x=30(0.002)(40) \cos 40 t+2700(0.002) \sin 40 t\)
Find the steady-state solution of the differential equation.\(3 \ddot{x}+\frac{2700(0.002)}{\omega} \dot{x}+2700 x=20 \sin \omega t\)
Find the steady-state solution of the differential equation.\(3 \ddot{x}+30 \dot{x}+2700 x=30 \sin 50 t+20 \sin 20 t\)
Find the steady-state solution of the differential equation.\( \quad 3 \ddot{x}+2700 x= \begin{cases}50 \sin 20 t-5 & \dot{x}>0 \\ 50 \sin 20 t+5 & \dot{x}
Find the steady-state solution of the differential equation.Match the quantity with the appropriate units (units may used more than once, some units may not be used).(a) Steady-state amplitude, \(X\)(i) \(\mathrm{m}\)(b) Steady-state amplitude of torsional oscillations, \(\Theta\)(ii) none(c)
A \(40 \mathrm{~kg}\) mass hangs from a spring with a stiffness of \(4 \times 10^{4} \mathrm{~N} / \mathrm{m}\). A harmonic force with a magnitude of \(120 \mathrm{rad} / \mathrm{s}\) is applied. Determine the amplitude of the forced response.
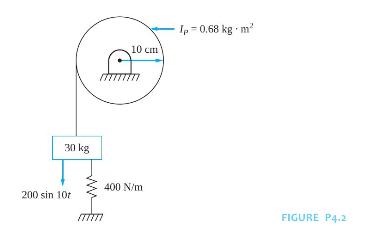
Determine the amplitude of forced oscillations of the \(30 \mathrm{~kg}\) block of Figure P4.2. 30 kg 10 cm Ip -0.68 kg m 400 N/m 200 sin 10t FIGURE P4.2
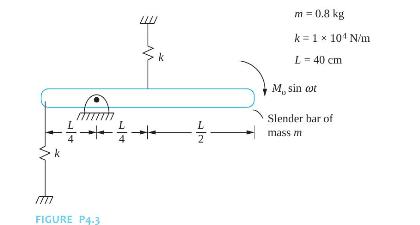
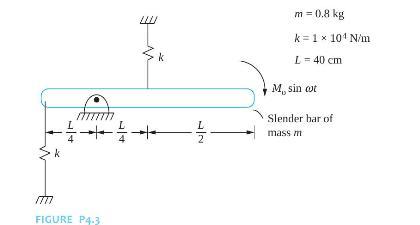
For what values of \(M_{0}\) will the forced amplitude of angular displacement of the bar in Figure P 4.3 be less than \(3^{\circ}\) if \(\omega=25 \mathrm{rad} / \mathrm{s}\) ? m FIGURE P4.3 3K m=0.8kg k=1 104 N/m L=40cm M, sin cot Slender bar of mass m
For what values of \(\omega\) will the forced amplitude of the bar in Figure P4.3 be less than \(3^{\circ}\) if \(M_{0}=300 \mathrm{~N} \cdot \mathrm{m}\) ? FIGURE P4.3 m = 0.8 kg k = 1 10 N/m L = 40 cm M sin cot Slender bar of mass m
A \(2 \mathrm{~kg}\) gear with a radius of \(20 \mathrm{~cm}\) is mounted to the end of a \(1-\mathrm{m}\) long steel \(\left(G=80 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\right)\) shaft. A moment \(M=100 \sin 150 t\) is applied to the gear. For What shaft radii is the value of the forced
During operation, a \(100 \mathrm{~kg}\) reciprocating machine is subject to a force \(F(t)=\) \(200 \sin 60 t \mathrm{~N}\). The machine is mounted on springs of an equivalent stiffness of \(4.3 \times 10^{6} \mathrm{~N} / \mathrm{m}\). What is the machine's steady-state amplitude?
A \(40 \mathrm{~kg}\) pump is to be placed at the midspan of a \(2.5-\mathrm{m}\) long steel \((E=200 \times\) \(10^{9} \mathrm{~N} / \mathrm{m}^{2}\) ) beam. The pump is to operate at \(3000 \mathrm{rpm}\). For what values of the cross-sectional moment of inertia will the oscillations of the pump
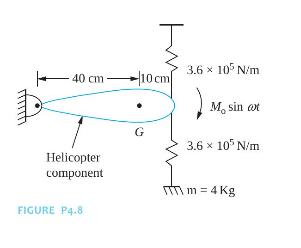
To determine the equivalent moment of inertia of a rigid helicopter component, an engineer decides to run a test in which she pins the component a distance of \(40 \mathrm{~cm}\) and mounts the component on two springs of stiffness \(3.6 \times 10^{5} \mathrm{~N} / \mathrm{m}\), as shown in Figure
Showing 1800 - 1900
of 4547
First
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
Last
Step by Step Answers