New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
introduction mechanical engineering
Mechanical Vibrations Theory And Applications 1st Edition S. GRAHAM KELLY - Solutions
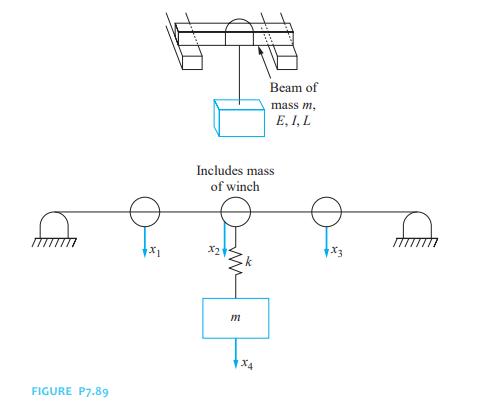
Determine the natural frequencies of the system of Chapter Problem 7.89. The beam is of length \(5 \mathrm{~m}\), made of a material of elastic modulus \(200 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\), and has a cross-sectional moment of inertia of \(1.4 \times 10^{-5} \mathrm{~m}^{4}\). The
Determine the free vibration response of the railroad bridge of Chapter Problem 8.14 if a ground disturbance initially leads to \(\theta_{1}=0.8^{\circ}\) with \(\theta_{2}=\theta_{3}=0\).Data From Chapter Problem 8.14:A \(500 \mathrm{~kg}\) machine is placed at the end of a
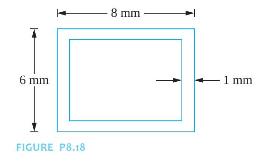
A robot arm is \(60 \mathrm{~cm}\) long, made of a material of elastic modulus \(200 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\), and has the cross section of Figure P8.18. The total mass of the arm is \(850 \mathrm{~g}\). A tool of mass \(1 \mathrm{~kg}\) is attached to the end of the arm. Assume
A \(30,000 \mathrm{~kg}\) locomotive is coupled to a fully loaded \(20,000 \mathrm{~kg}\) boxcar and moving at \(6.5 \mathrm{~m} / \mathrm{s}\). The assembly is coupled to a stationary and empty \(5,000 \mathrm{~kg}\) cattle car. The stiffness of each coupling is \(5.7 \times 10^{5} \mathrm{~N} /
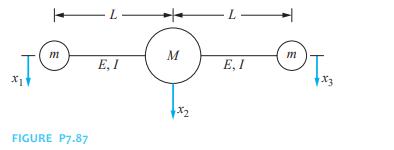
Determine the natural frequencies and mode shapes for the three degree-of freedom model of an airplane of Chapter Problem 7.87. Assume \(m=3.5 \mathrm{~m}\).Data From Chapter Problem 7.87:Figure P7.87 illustrates a three degree-of-freedom model of an aircraft. A rigid fuselage is attached to two
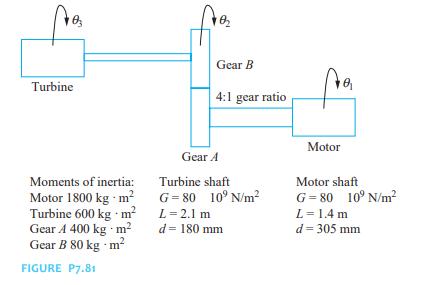
Determine the natural frequencies and mode shapes of the torsional system of Problem 7.81.Data From Problem 7.81:Derive the differential equations governing the torsional oscillations of the turbomotor of Figure P7.81. The motor operates at 800 rpm and the turbine shaft turns at 3200 rpm. 63 182
Use a four degree-of-freedom model to approximate the two lowest nonzero natural frequencies of a free-free beam.
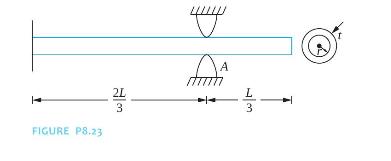
A pipe extends from a wall as shown in Figure P8.23. The pipe is supported at \(A\) to prevent transverse displacement, but not to prevent rotation. Under what conditions will the pipe's lowest natural frequency of transverse vibrations coincide with its frequency of free torsional vibrations?
Show that Rayleigh's quotient \(R(\mathbf{X})\) is stationary if and only if \(\mathbf{X}\) is a mode shape vector.
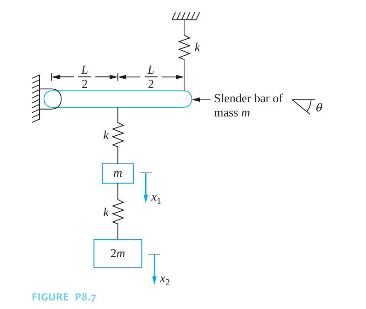
Use Rayleigh's quotient to determine an upper bound on the lowest natural frequency of the system of Figure P8.7. Use at least four trial vectors. -- FIGURE P8.7 k m ww 2m TX x2 Slender bar of mass m
An alternative method to derive the uncoupled equations governing the motion of the free vibrations of a \(n \mathrm{DOF}\) system in terms of principal coordinates is to introduce a linear transformation between the generalized coordinates \(\mathbf{x}\) and the principal coordinates
Use the method of Chapter Problem 8.26 to derive the uncoupled equations governing the principal coordinates for a system with proportional damping.Data From Chapter Problem 8.26:An alternative method to derive the uncoupled equations governing the motion of the free vibrations of a \(n
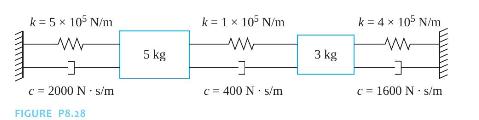
Determine the free vibration response of the system of Figure P8.28 if the system is released from rest after the \(3 \mathrm{~kg}\) block is displaced \(5 \mathrm{~mm}\). k = 5 x 105 N/m www c 2000 N s/m FIGURE P8.28 k = 1 105 N/m ww 5 kg 3 kg c 400 N s/m k = 4 105 N/m w c = 1600 N - s/m
If the modal damping ratio for the lowest mode of Chapter Problem 8.13 is 0.03 , determine the modal damping ratio for the higher modes and determine the response of the system if the machine is displaced \(2 \mathrm{~mm}\) and released.Data From Chapter Problem 8.13:A \(400 \mathrm{~kg}\) machine
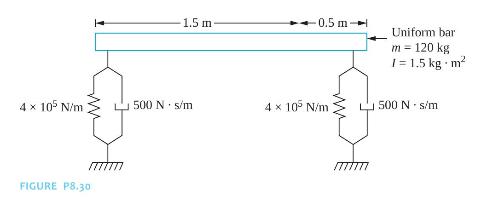
Determine the free-vibration response of the bar of Figure P8.30 is the mass center is displaced \(1 \mathrm{~cm}\) from equilibrium while the bar is held horizontal and the system released from this position. 1 1.5 m 0.5 m-- Uniform bar m = 120 kg 1=1.5 kg m 4 x 105 N/m 500 N s/m 4 105 N/m 500 N
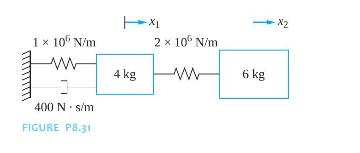
Determine the free-vibration response of the system of Figure P8.31. 1 10 N/m w 400 N s/m FIGURE P8.31 Tx- 2 10 N/m -X2 4 kg www 6 kg
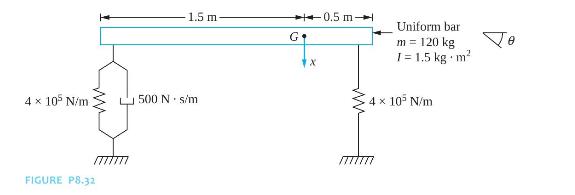
Determine the free-vibration response of the system of Figure P8.32. 1.5 m 0.5 m G 1x 4 105 N/m 500 N s/m FIGURE P8.32 Uniform bar m = 120 kg 1=1.5 kg m 4 10 N/m
Determine the free-vibration response of the system of Chapter Problem 7.87 when \(E=200 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}, I=1.5 \times 10^{-6} \mathrm{~m}^{4}, L=0.8 \mathrm{~m}, k=1.5 \times 10^{5} \mathrm{~N} / \mathrm{m}\), \(c=250 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}, m_{1}=4
The Laplace transform method cannot be used to determine the response of a system with proportional damping.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The principal coordinates are used to uncouple the differential equations for forced vibrations.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
For a system with a damping matrix that is proportional to the stiffness matrix, the higher modes are more highly damped and therefore have less of an effect on the forced response.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make
The elements of the impedance matrix are the transfer functions \(G_{i, j}(s)\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The principal coordinates are only used to determine the steady-state response of a system.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The vector of forces for the right-hand side of the equations defining the principal coordinates is calculated by \(\mathbf{G}=\mathbf{P}^{T} \mathbf{F}\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The \(k\) th component of \(\mathrm{G}\), which is the vector on the right-hand side of the equations defining the generalized coordinate, is calculated by taking the kineticenergy scalar product of the forced vector with the \(k\) th normalized mode shape.Indicate whether the statement presented
The determinant of the impedance matrix of an \(n \mathrm{DOF}\) system is a polynomial of what order?
The lowest natural frequency of a five degree-of-freedom system is \(30 \mathrm{rad} / \mathrm{s}\). Select the differential equation which could be the equation for the principal coordinate.(a) \(\ddot{p}_{1}+\dot{p}_{1}=g_{1}(t)\)(b) \(\ddot{p}_{1}+30 \dot{p}_{1}=g_{1}(t)\)(c) \(\ddot{p}_{1}+900
To derive modal analysis, the ___________ is used to write the general solution as a linear combination of the principal coordinates. Regarding the derivation of modal analysis for an undamped system or a system with proportional damping.
The ___________ scalar product is taken with both sides of the equation after the linear combination is substituted into the differential equations. Regarding the derivation of modal analysis for an undamped system or a system with proportional damping.
The equations are ___________ using mode shape ___________ with respect to ___________ and ___________. Regarding the derivation of modal analysis for an undamped system or a system with proportional damping
The ___________ integral can be used to solve the resulting nonhomogenous differential equations. Regarding the derivation of modal analysis for an undamped system or a system with proportional damping.
For systems with a general damping matrix, the differential equations governing the nDOF system is written as ___________ first-order differential equations. Regarding the derivation of modal analysis for a system with a general damping matrix.
The vector \(\mathbf{F}\) is defined as the \(2 n \times 1\) vector ___________.Regarding the derivation of modal analysis for a system with a general damping matrix.
The modal matrix \(\tilde{\mathbf{P}}\) is defined as the matrix whose columns are normalized by ___________. .Regarding the derivation of modal analysis for a system with a general damping matrix.
The differential equations governing the principal coordinates of the system are___________. Regarding the derivation of modal analysis for a system with a general damping matrix.
The differential equations have a solution, \(\tilde{p}_{i}=\int_{0}^{t} \tilde{g}_{i}(t) e^{-\gamma_{i}(t-\tau)} d \tau\), called the ________.Regarding the derivation of modal analysis for a system with a general damping matrix.
Give two reasons why modal analysis is convenient to use before solving a system using the Runge-Kutta method. Regarding the derivation of modal analysis for a system with a general damping matrix.
Give two reasons why modal analysis should be used before using numerical integration of the convolution integral.Regarding the derivation of modal analysis for a system with a general damping matrix.
If the system is undamped and subject to a force vector equal to \(\mathbf{F}=\left[\begin{array}{lllll}0 & 0 & \sin 54 t & 0 & 0\end{array}\right]^{T}\), determine the following.(a) Write the differential equation for the first principal coordinate.(b) What is the steady-state solution of this
If the system is damped with modal damping ratios of \(0.3,0.615,0.825,1.395\), and 1.71, and has a forcing vector equal to \(\mathbf{F}=\left[\begin{array}{lllll}0 & 0 & \sin 54 t & 0 & 0\end{array}\right]^{T}\), determine the following.(a) Write the differential equation for \(p_{4}\).(b) What is
The differential equations governing a three degree-of-freedom system are\[ \left[\begin{array}{lll} 2 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 3 \end{array}\right]\left[\begin{array}{l} \ddot{x}_{1} \\ \ddot{x}_{2} \\ \ddot{x}_{3} \end{array}\right]\left[\begin{array}{lll} 1 & 0 & 0 \\ 0 & 0 & 0
The convolution integral is the solution to the differential equation governing the motion of a SDOF system with initial conditions equal to zero.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The convolution integral can be derived using Laplace transforms or variation of parameters.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The effect of an impulse applied to a SDOF system is to cause a discrete change in displacement.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The Laplace transform method derives a solution in terms of constants of integration and the determination of the constants is obtained through application of initial conditions.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it
Numerical integration of the convolution integral can be obtained by interpolating the forcing function and exactly integrating the interpolation times \(h(t-\tau)\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Self-starting methods are best for numerical integration of the equation of motion.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The transfer function for a SDOF system is the ratio of the Laplace transform of the input to the Laplace transform of the output.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The transfer function is the Laplace transform of the step response of a system.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The maximum displacement of a machine mounted on an isolator due to an impulsive force is minimized by selecting the damping ratio of the system to be 0.25.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The maximum transmitted force of a machine mounted on an isolator due to an impulsive force is minimized by selecting the damping ratio of the system to be 0.25.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
What is the physical meaning of the function \(h(t)\) ?
What pre-integrated form of Newton's second law is used in the derivation of \(h(t)\) ?
What does the convolution integral represent?
Explain the meaning of\(x(1)=\int_{0}^{1} F(\tau) h(1-\tau) d \tau\)
What is meant by the approximation of a pulse being short duration?
What is the response spectrum of a pulse?
Why is the impulsive response of a system with motion input not defined?
A mass-spring system with \(m=2 \mathrm{~kg}\) and \(k=1000 \mathrm{~N} / \mathrm{m}\) is subject to an impulse of magnitude \(12 \mathrm{~N} \cdot \mathrm{s}\). What is the velocity imparted to the system?
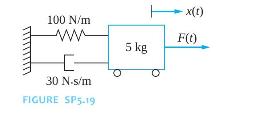
A mass-spring and viscous-damper system is shown in Figure SP5.19. What is the transfer function for the system? x(t) 100 N/m www F(t) 5 kg 30 N-s/m FIGURE SP5-19
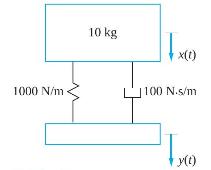
A mass-spring and viscous-damper system with motion input is shown in Figure SP5.20. What is the transfer function for the system?FIGURE SP5.20 1000 N/m 10 kg Fxxx x(t) 100 N.s/m y(t)
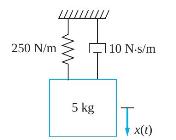
A mass-spring and viscous-damper system is shown in Figure SP5.21. What is the Laplace transform of the system's impulsive response?FIGURE SP5.21 250 N/m 110 N-s/m 5 kg x(1)
Determine the impulsive response of an undamped mass-spring system with a mass of \(5 \mathrm{~kg}\) and stiffness of \(1000 \mathrm{~N} / \mathrm{m}\).
An impulse with a magnitude of \(15 \mathrm{~N} \cdot \mathrm{s}\) is applied to a mass-spring system and removed. The mass of the system is \(0.5 \mathrm{~kg}\), and the stiffness is \(200 \mathrm{~N} / \mathrm{m}\). Determine the response of the system.
Match the quantity with the appropriate units (units may used more than once, some units may not be used).(a) Impulse, \(I\)(i) \(\mathrm{N} \cdot \mathrm{m}\)(b) Maximum displacement, \(x_{\max }\)(ii) \(\mathrm{rad} / \mathrm{s}\)(c) Initial kinetic energy, \(1 / 2 m v^{2}\)(iii)
A SDOF system with \(m=20 \mathrm{~kg}, k=10,000 \mathrm{~N} / \mathrm{m}\), and \(c=540 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\) is at rest in equilibrium when a \(50 \mathrm{~N} \cdot \mathrm{s}\) impulse is applied. Determine the response of the system.
A SDOF system with \(m=10 \mathrm{~kg}, k=40,000 \mathrm{~N} / \mathrm{m}\), and \(c=300 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\) is at rest in equilibrium when a \(80 \mathrm{~N} \cdot \mathrm{s}\) impulse is applied. This is followed by a \(40 \mathrm{~N} \cdot \mathrm{s}\) impulse \(0.02
A SDOF system with \(m=1.3 \mathrm{~kg}, k=12,000 \mathrm{~N} / \mathrm{m}\), and \(c=400 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\) is at rest in equilibrium when a \(100 \mathrm{~N} \cdot \mathrm{s}\) impulse is applied. This is followed by a \(150 \mathrm{~N} \cdot \mathrm{s}\) impulse \(0.12
Use the method of variation of parameters to obtain the general solution of Equation (5.1) and show that it can be written in the form of the convolution integral, Equation (5.25).\(\ddot{x}+2 \zeta \omega_n \dot{x}+\omega_n^2 x=\frac{F_{\mathrm{eq}}(t)}{m_{\mathrm{eq}}}
Use the convolution integral to determine the response of an underdamped SDOF system of mass \(m\) and natural frequency \(\omega_{n}\) when the excitation is the unit step function, \(u(t)\).
Let \(g(t)\) be the response of an underdamped system to a unit step function and \(h(t)\) the response of an underdamped system to a unit impulse function. Show\[ h(t)=\frac{d g}{d t} \]
Use the convolution integral and the notation and results of Chapter Problem 5.6 to derive the following alternative expression for the response of a system subject to an excitation, \(F(t)\) :\[ x(t)=F(0) g(t)+\int_{0}^{t} \frac{d F(\tau)}{d \tau} g(t-\tau) d \tau \]Data From Chapter Problem
A SDOF undamped system is initially at rest in equilibrium and subject to a force \(F(t)=F_{0} t e^{-t / 2}\). Use the convolution integral to determine the response of the system.
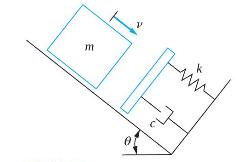
The mass of Figure P5.9 has a velocity \(v\) when it engages the spring-dashpot mechanism. Let \(x(t)\) be the displacement of the mass from the position where the mechanism is engaged. Use the convolution integral to determine \(x(t)\). Assume the system is underdamped.FIGURE P5.9 m y
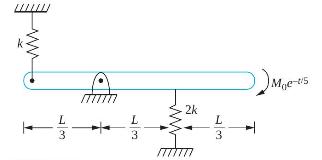
Use the convolution integral to determine the response of the system of Figure P5.10.FIGURE P5.10 --- 3 3 www -2k L 3 M Mge-5
Use the convolution integral to determine the response of an underdamped SDOF system of natural frequency \(\omega_{n}\) and damping ratio \(\zeta\) when subject to a harmonic excitation \(F(t)=F_{0} \sin \omega t\).
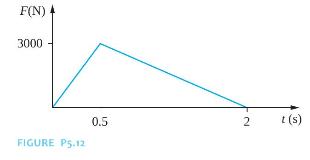
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.12. Use the principle of superposition and the convolution integral to determine
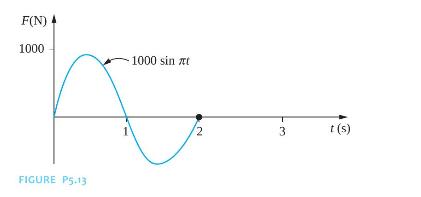
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.13. Use the principle of superposition and the convolution integral to determine
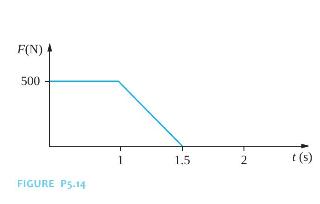
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.14. Use the principle of superposition and the convolution integral to determine
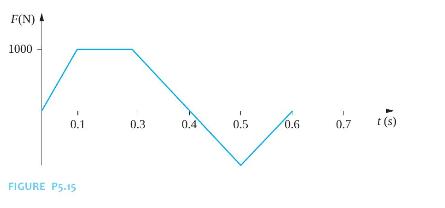
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.15. Use the principle of superposition and the convolution integral to determine
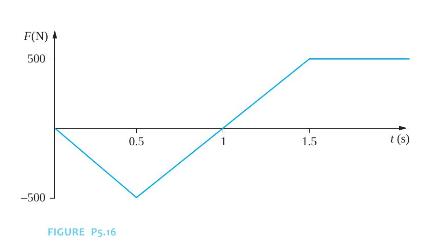
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.16. Use the principle of superposition and the convolution integral to determine
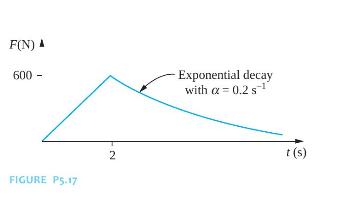
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.17. Use the principle of superposition and the convolution integral to determine
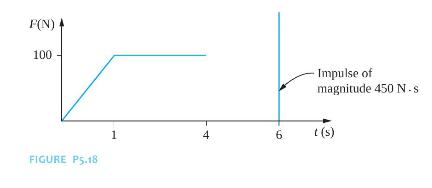
A machine tool with a mass of \(30 \mathrm{~kg}\) is mounted on an undamped foundation of stiffness \(1500 \mathrm{~N} / \mathrm{m}\). During operation, it is subject to one of the machining force shown in Figure P5.18. Use the principle of superposition and the convolution integral to determine
The force applied to the \(120 \mathrm{~kg}\) anvil of a forge hammer during operation is approximated as a rectangular pulse of magnitude \(2000 \mathrm{~N}\) for a duration of \(0.3 \mathrm{~s}\). The anvil is mounted on a foundation of stiffness \(2000 \mathrm{~N} / \mathrm{m}\) and damping
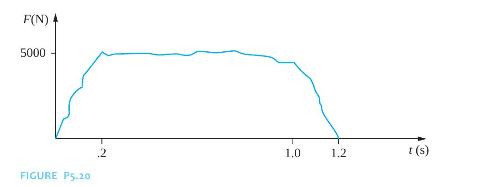
A one-story frame structure houses a chemical laboratory. Figure P5.20 shows the results of a model test to predict the transient force to which the structure would be subject if an explosion would occur. The equivalent mass of the structure is \(2000 \mathrm{~kg}\) and its equivalent stiffness is
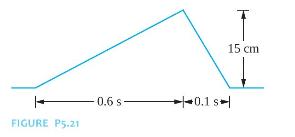
A \(20 \mathrm{~kg}\) radio set is mounted in a ship on an undamped foundation of stiffness \(1000 \mathrm{~N} / \mathrm{m}\). The ship is loosely tied to a dock. During a storm, the ship experiences the displacement of Figure P5.21. Determine the maximum acceleration of the radio. FIGURE P5.21 0.6
A personal computer of mass \(m\) is packed inside a box such that the stiffness and damping coefficient of the packing material are \(k\) and \(c\), respectively. The package is accidentally dropped from a height \(h\) and lands on a hard surface without rebound. Set up the convolution integral
Use the Laplace transform method to determine the response of a system at rest in equilibrium when subject to\[ F(t)=F_{0} \cos \omega t\left[1-u\left(t-t_{0}\right)\right] \]for (a) \(\zeta=0\), (b) \(0
Use the Laplace transform method to determine the response of an undamped SDOF system initially at rest in equilibrium when subject to a symmetric triangular pulse of magnitude \(F_{0}\) and total duration \(t_{0}\).
Use the Laplace transform method to determine the response of an underdamped SDOF system to a rectangular pulse of magnitude \(F_{0}\) and time \(t_{0}\).
Use the Laplace transform method to derive the response of a SDOF system initially at rest in equilibrium when subject to a harmonic force \(F_{0} \sin \omega t\), when (a) \(\omega eq \omega_{n}\), and (b) \(\omega=\omega_{n}\).
Determine the transfer function for the relative displacement of a SDOF system with base motion defined as \(G(s)=\frac{Z(s)}{Y(s)}\) where \(Z(s)\) is the Laplace transform of the relative displacement and \(Y(s)\) is the Laplace transform of the motion of the base.
Determine the transfer function for the force transmitted to the foundation for a SDOF system. The transfer function is defined as \(G(s)=\frac{F_{t}(s)}{F(s)}\) where \(F_{t}(s)\) is the Laplace transform of the transmitted force and \(F(s)\) is the Laplace transform of the applied force.
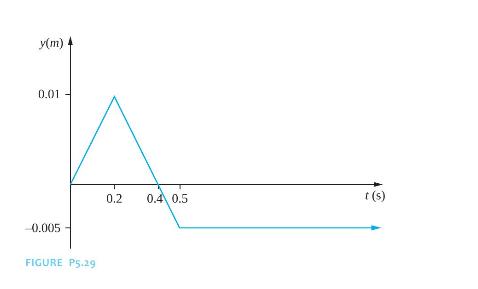
Use the transfer function to determine the response of a SDOF system excited by motion of its base with \(m=3 \mathrm{~kg}\) and \(k=18,000 \mathrm{~N} / \mathrm{m}\) where the base motion is shown in Figure P5.29. y(m) 0.01 -0.005 FIGURE P5.29 0.2 0.4 0.5 t(s)
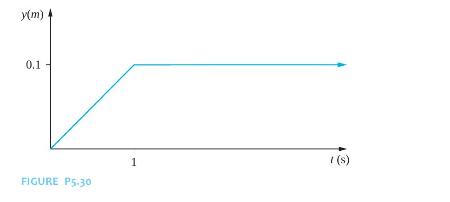
Use the transfer function to determine the response of a SDOF system with \(m=1 \mathrm{~kg}, k=100 \mathrm{~N} / \mathrm{m}\), and \(c=6 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\) when the system is subject to motion of its base shown in Figure P5.30. y(m) 0.1 FIGURE P5.30 1 1(s)
Repeat Chapter Problem 5.30 if the system parameters are \(m=1 \mathrm{~kg}\), \(k=200 \mathrm{~N} / \mathrm{m}\), and \(c=30 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\).Data From Chapter Problem 5.30:Use the transfer function to determine the response of a SDOF system with \(m=1 \mathrm{~kg},
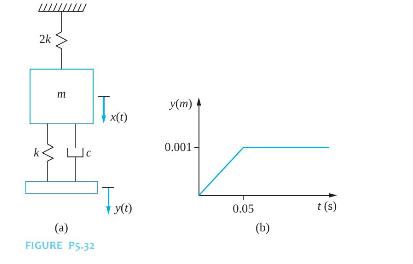
For the system of Figure P5.32(a), complete the following.(a) Determine its transfer function defined as \(G(s)=\frac{X(s)}{Y(s)}\).(b) Use the transfer function to find the response of the system due to \(y(t)\) as shown in Figure P5.32(b). Use \(m=1 \mathrm{~kg}, k=100 \mathrm{~N} / \mathrm{m}\),
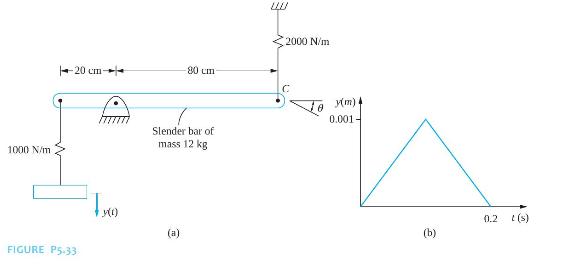
For the system of Figure P5.33(a), complete the following.(a) Determine its transfer function defined as \(G(s)=\frac{\theta(s)}{Y(s)}\) where \(\theta(s)\) is the Laplace transform of the angular displacement of the bar.(b) Use the transfer function to determine \(\theta(t)\) due to \(y(t)\), as
During its normal, operation, a \(144-\mathrm{kg}\) machine tool is subject to a 15,000 \(\mathrm{N} \cdot \mathrm{s}\) impulse. Design an efficient isolator such that the maximum force transmitted through the isolator is \(2500 \mathrm{~N}\) and the maximum displacement is minimized.
A \(110 \mathrm{~kg}\) pump is mounted on an isolator of stiffness \(4 \times 10^{5} \mathrm{~N} / \mathrm{m}\) and a damping ratio of 0.15 . The pump is given a sudden velocity of \(30 \mathrm{~m} / \mathrm{s}\). What is the maximum force transmitted through the isolator and what is the maximum
Showing 700 - 800
of 4547
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Last
Step by Step Answers