New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
introduction mechanical engineering
Mechanical Vibrations Theory And Applications 1st Edition S. GRAHAM KELLY - Solutions
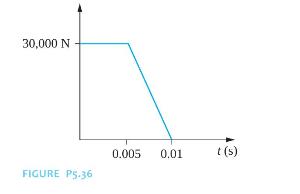
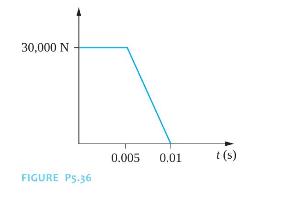
During operation, a \(50-\mathrm{kg}\) machine tool is subject to the short-duration pulse of Figure P5.36. Design an isolator that minimizes the maximum displacement and reduces the maximum transmitted force to \(5000 \mathrm{~N}\). What is the maximum displacement of the machine tool when this
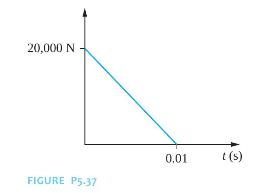
Repeat Chapter Problem 5.36 for the short-duration pulse of Figure P5.37.Data From Chapter Problem 5.36:During operation, a \(50-\mathrm{kg}\) machine tool is subject to the short-duration pulse of Figure P5.36. Design an isolator that minimizes the maximum displacement and reduces the maximum
A ship is moored at a dock in rough seas and frequently impacts the dock. The maximum velocity change caused by the impact is \(15 \mathrm{~m} / \mathrm{s}\). Design an isolator to protect a sensitive \(80-\mathrm{kg}\) navigational control system such that its maximum acceleration is \(30
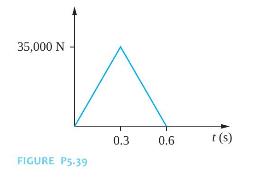
A one-story frame structure with an equivalent mass of \(12,000 \mathrm{~kg}\) and stiffness of \(1.8 \times 10^{6} \mathrm{~N} / \mathrm{m}\) is subject to a blast whose force is given in Figure P5.39. What is the maximum deflection of the structure? 35,000 N 0.3 0.6 t(s) FIGURE P5-39
A \(20 \mathrm{~kg}\) machine tool is on a foundation that is subject to an acceleration that is modeled as a versed sine pulse with a magnitude of \(20 \mathrm{~m} / \mathrm{s}^{2}\) and duration of \(0.4 \mathrm{~s}\). Design an undamped isolator such that the maximum acceleration felt by the
During operation, a \(100 \mathrm{~kg}\) machine tool is exposed to a force that is modeled as a sinusoidal pulse with a magnitude of \(3100 \mathrm{~N}\) and duration of \(0.05 \mathrm{~s}\). Design an isolator with a damping ratio 0.1 such that the maximum force transmitted through the isolator
During operation a \(80 \mathrm{~kg}\) machine tool is subject to a triangular pulse with a magnitude of \(30,000 \mathrm{~N}\) and duration of \(0.15 \mathrm{~s}\). What is the range of undamped isolator stiffness such that the maximum transmitted force is 15,000 \(\mathrm{N}\) and the maximum
A two degree-of-freedom system has two natural frequencies.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The natural frequencies are determined by setting \(\left|\omega^{2} \mathbf{K}-\mathbf{M}\right|=0\).Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The natural frequencies of a two degree-of-freedom system depend upon the choice of generalized coordinates used to model the system.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The natural frequencies for an undamped two-degree-of-freedom system are determined by solving for the roots of a fourth-order polynomial that only has even powers of the frequency.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make
The modal fraction represents the damping of each mode.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The principal coordinates are the generalized coordinates for which the mass matrix and the stiffness matrix are symmetric matrices.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The free response of a damped two degree-of-freedom system has two modes of vibration, both of which are underdamped.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
A displacement of a node for a mode of a two degree-of-freedom system can serve as a principal coordinate.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The modal fractions for a two degree-of-freedom system depend upon the choice of generalized coordinates used to model the system.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The sinusoidal transfer function can be used to determine the steady-state response of a two degree-of-freedom system.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Addition of an undamped vibration absorber transforms a SDOF system into a system with two degrees of freedom.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
The undamped vibration absorber is tuned to the natural frequency of the primary system to eliminate steady-state vibrations of the absorber.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
An optimally tuned damped vibration absorber is tuned such that only the amplitude of vibration during start-up is minimized.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
Addition of a dynamic vibration absorber to a damped primary system will eliminate the steady-state vibrations of the primary system if the absorber is tuned to the excitation frequency.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to
A Houdaille damper is used for vibration control in engine crankshafts.Indicate whether the statement presented is true or false. If true, state why. If false, rewrite the statement to make it true.
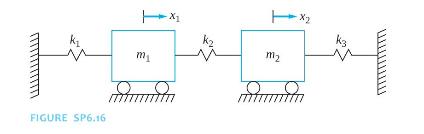
Draw a FBD of the block whose displacement is \(x_{1}\) of Figure SP6.16 at an arbitrary instant of time, appropriately labeling the forces. FIGURE SP6.16 m X1 -x2 m2
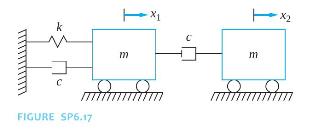
Draw a FBD of the block whose displacement is \(x_{2}\) of Figure SP6.17 at an arbitrary instant of time, appropriately labeling the forces. k FIGURE SP6.17 -x2 m m
What is the normal-mode solution and how is it used?
Discuss the difference in the assumed solution for free vibrations of an undamped two degree-of-freedom system and one with viscous damping.
What does a real solution of the fourth-order equation for a system with viscous damping to solve for \(\lambda\) mean regarding the mode of vibration?
What does a complex solution of the fourth-order equation for a system with viscous damping to solve for \(\lambda\) mean regarding the mode of vibration?
What is the meaning of the transfer function \(G_{1,2}(s)\) ?
Define the sinusoidal transfer function.
Write the differential equations for the principal coordinates of free undamped vibrations of a two degree-of-freedom system with natural frequencies \(\omega_{1}\) and \(\omega_{2}\).
A two degree-of-freedom system has a mode with a modal fraction equal to zero. What does this imply?
A two degree-of-freedom system has a mode with a modal fraction equal to one. What does this imply?
How many nodes are there for the mode corresponding to the lowest natural frequency of a two degree-of-freedom system?
If the differential equations governing a two degree-of-freedom system are uncoupled when a certain set of generalized coordinates are used, the coordinates must be coordinates of the system.
The general form of the transfer function is\[ G(s)=\frac{N(s)}{D(s)} \]The transfer functions \(G_{1,1}(s)\) and \(G_{2,1}(s)\), defined for a two degree-of-freedom system, have which in common (choose one)?(a) The numerator \(N(s)\)(b) The denominator \(D(s)\)(c) Neither the numerator or the
State the convolution integral solution for the forced response of the generalized coordinate \(x_{1}(t)\) when due to a force \(F(t)\) applied at the location where the second generalized coordinate \(x_{2}(t)\) is defined.
How are the amplitudes and phases determined for free vibrations of a two degree-of-freedom system?
How is \(G(i \omega)\) resolved into polar coordinates?
What is the vibration amplitude of the primary system when a dynamic vibration absorber tuned to the excitation frequency is added to the system?
How does a dynamic vibration absorber work?
When is a vibration damper used?
What two problems does the addition of damping address when added to a vibration absorber?
How is the optimum damping ratio of a Houdaille damper defined?
The equation\[ 6 \omega^{4}-27 \omega^{2}+21=0 \]is an equation developed to determine the natural frequencies of a system. Solve the equation to determine the natural frequencies.
The equations for the natural frequencies and mode shape vectors of a two degree-of-freedom system are\[ \left[\begin{array}{cc} -\omega^{2}+3 & -2 \\ -2 & -\omega^{2}+2 \end{array}\right]\left[\begin{array}{l} 1 \\ \chi \end{array}\right]=\left[\begin{array}{l} 0 \\ 0 \end{array}\right]
A two degree-of-freedom system has a modal fraction for one of its mode shapes of -1 . (a) Draw the mode shape diagram corresponding to that mode. (b) Does the mode shape correspond to the lower or higher natural frequency?
The transfer function for one generalized coordinate of a two degree-of-freedom system is\[ G(s)=\frac{1}{s^{4}+3 s^{2}+2} \](a) Calculate \(G(3 i)\).(b) What are the natural frequencies of the system?(c) If this system were excited by a force equal to \(5 \sin 3 t\), what is the steady-state
The transfer function for a generalized coordinate, \(x_{1}\), of a two degree-offreedom system, due to a force at the other generalized coordinate, \(x_{2}\), is\[ G(s)=\frac{1}{s^{4}+2 s^{3}+4 s^{2}+10 s+25} \]If \(x_{2}\) is subject to a force \(2.5 \sin 4 t\), what is the steady-state
A machine vibrates at a frequency ratio of 1.05. A vibration absorber tuned to the excitation frequency is added to the machine. What is the value of(a) \(r_{2}\),(b) \(r_{1}\),(c) \(q\) ?
If the mass ratio of the absorber of Short Problem 6.43 is 0.2 and the natural frequency of the primary system is \(100 \mathrm{rad} / \mathrm{s}\), what are the natural frequencies with the absorber in place?Data From Short Problem 6.43:A machine vibrates at a frequency ratio of 1.05. A vibration
A machine is excited at a frequency of \(30 \mathrm{~Hz}\) by a force with an amplitude of \(200 \mathrm{~N}\). It is desired to eliminate steady-state vibrations of the machine by addition of a vibration absorber.(a) What frequency should the absorber be tuned?(b) If the mass of the absorber is
An optimally damped vibration absorber is being designed for a primary system of natural frequency \(100 \mathrm{rad} / \mathrm{s}\). The mass of the machine is \(50 \mathrm{~kg}\) and the mass of the absorber is to be \(10 \mathrm{~kg}\).(a) What is the natural frequency of the absorber?(b) What
An optimally designed Houdaille damper is to be used to absorb the vibrations of a rotational system. The moment of inertia of the primary system is \(0.1 \mathrm{~kg} \cdot \mathrm{m}^{2}\) and the moment of inertia of the damper is to be is \(0.01 \mathrm{~kg} \cdot \mathrm{m}^{2}\).(a) What is
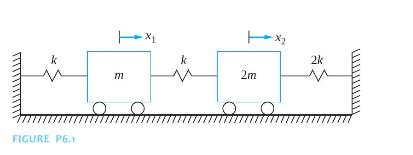
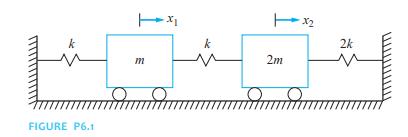
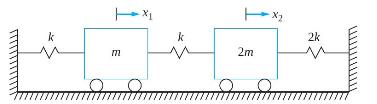
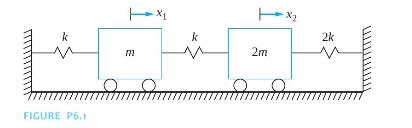
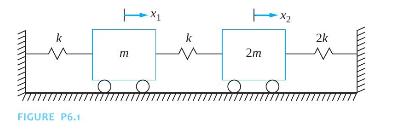
Derive the differential equation governing the two degree-of-freedom system shown in Figure P6.1 using \(x_{1}\) and \(x_{2}\) as generalized coordinates. k FIGURE P6.1 11 k E -X2 2m 2k
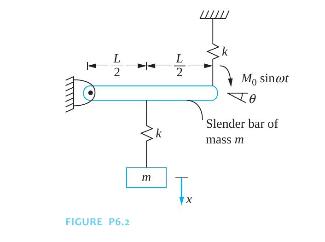
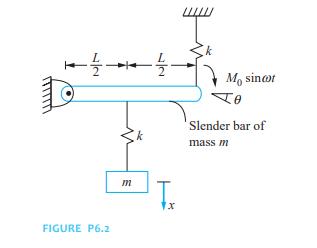
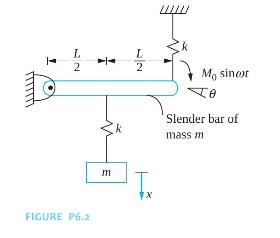
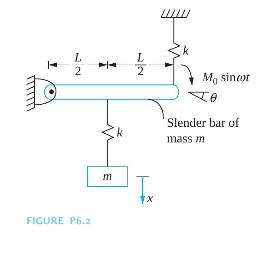
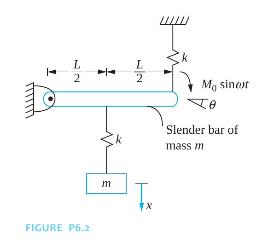
Derive the differential equation governing the two degree-of-freedom system shown in Figure P6.2 using \(x\) and \(\theta\) as generalized coordinates. 1 L 22 2 Mo siner k m FIGURE P6.2 Slender bar of mass m I
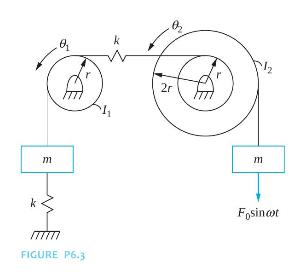
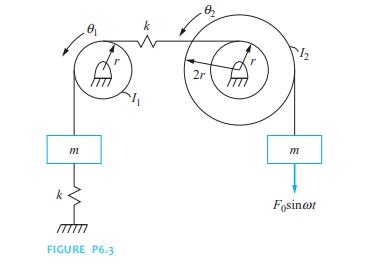
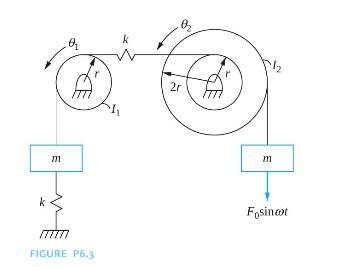
Derive the differential equations governing the two degree-of-freedom system shown in Figure P6.3 using \(\theta_{1}\) and \(\theta_{2}\) as generalized coordinates. k m 2r m FIGURE P6.3 Fosincot
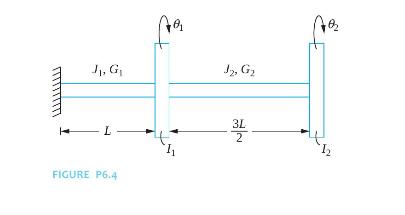
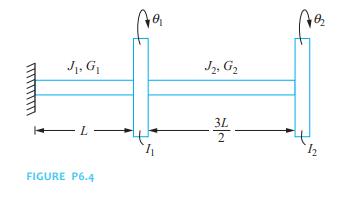
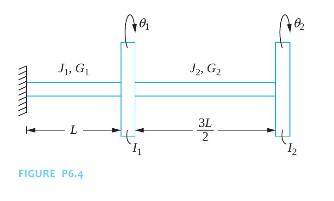
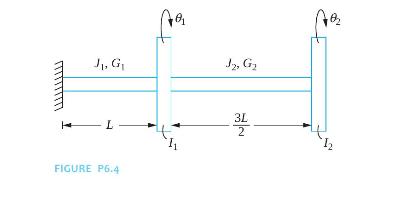
Derive the differential equations governing the two degree-of-freedom system shown in Figure P6.4 using \(\theta_{1}\) and \(\theta_{2}\) as generalized coordinates. J, G J, G 3L 1 L 2 FIGURE P6.4
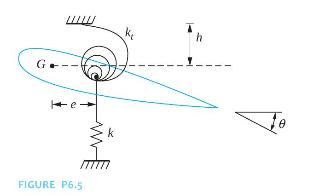
A two degree-of-freedom model of an airfoil shown in Figure P 6.5 is used for flutter analysis. Derive the governing differential equations using \(h\) and \(\theta\) as generalized coordinates. G k FIGURE P6.5 k h
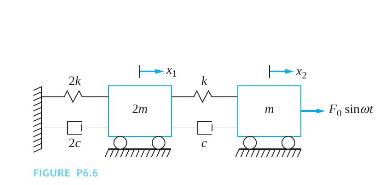
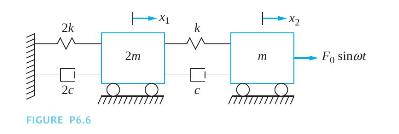
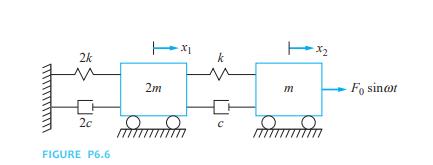
Derive the differential equations governing the damped two degree-of-freedom system shown in Figure P6.6 using \(x_{1}\) and \(x_{2}\) as generalized coordinates. 2k 2m 2c FIGURE P6.6 k C m -X2 Fo sinet
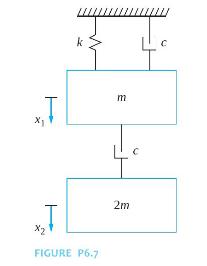
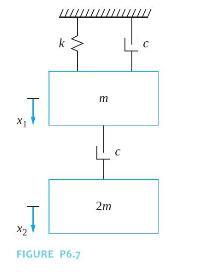
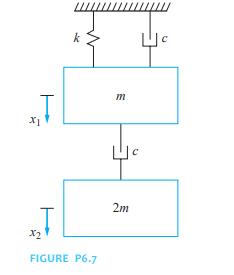
Derive the differential equations governing the damped two degree-of-freedom system shown in Figure P6.7 using \(x_{1}\) and \(x_{2}\) as generalized coordinates. x2 k FIGURE P6.7 m 2m
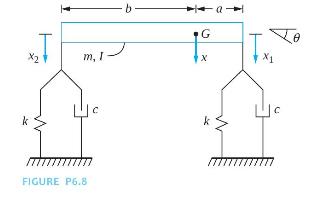
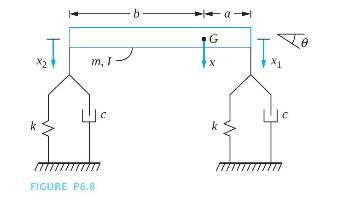
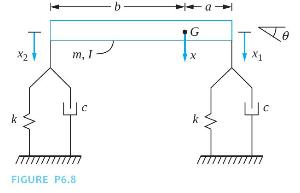
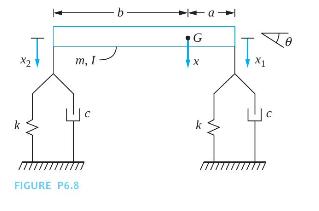
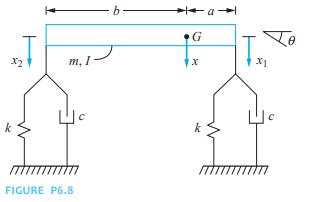
A two degree-of-freedom model of a machine tool is illustrated in Figure P6.8. Using \(x_{1}\) and \(x_{2}\) as generalized coordinates, derive the differential equations governing the motion of the system. G Tx T m, I X FIGURE P6.8 k
Derive the differential equation of the two degree-of-freedom model of the machine tool of Chapter Problem 6.8 using \(x\) and \(\theta\) as generalized coordinates.Data From Chapter Problem 6..8:A two degree-of-freedom model of a machine tool is illustrated in Figure P6.8. Using \(x_{1}\) and
Determine the natural frequencies of the system of Figure P6.1 if \(m=10 \mathrm{~kg}\) and \(k=1 \times 10^{5} \mathrm{~N} / \mathrm{m}\). Determine and graphically illustrate the mode shapes. Identify any nodes. k 1x m k 2m FIGURE P6.1 2k
Determine the natural frequencies of the system of Figure P6.2 if \(m=2 \mathrm{~kg}\), \(L=1 \mathrm{~m}\) and \(k=1000 \mathrm{~N} / \mathrm{m}\). Determine the modal fractions for each mode. FIGURE P6.2 m 1x Mo sincor Slender bar of mass m
Determine the natural frequencies of the system of Figure P6.3 if \(m=30 \mathrm{~g}\), \(I_{1}=8 \times 10^{-6} \mathrm{~kg} \cdot \mathrm{m}^{2}, I_{2}=2 \times 10^{-5} \mathrm{~kg} \cdot \mathrm{m}^{2}, r=5 \mathrm{~mm}\), and \(k=10 \mathrm{~N} / \mathrm{m}\). Determine the modal fraction for
Determine the natural frequencies of the system of Figure P 6.4 if \(I_{1}=0.3 \mathrm{~kg} \cdot \mathrm{m}^{2}\), \(I_{2}=0.4 \mathrm{~kg} \cdot \mathrm{m}^{2}, J_{1}=J_{2}=1.6 \times 10^{-8} \mathrm{~m}^{4}, G_{1}=G_{2}=80 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\), and \(L=30 \mathrm{~cm}\).
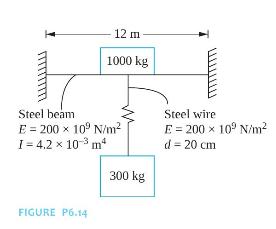
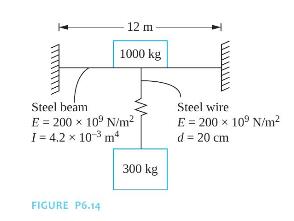
An overhead crane is modeled as a two degree-of-freedom system as shown in Figure P6.14. The crane is modeled as a mass of \(1000 \mathrm{~kg}\) on a steel \((E=200 \times\) \(10^{9} \mathrm{~N} / \mathrm{m}^{2}\) ) fixed-fixed beam with a moment of inertia of \(4.2 \times 10^{-3} \mathrm{~m}^{4}\)
A seismometer of mass \(30 \mathrm{~g}\) and stiffness \(40 \mathrm{~N} / \mathrm{m}\) is used to measure the vibrations of a SDOF system of mass \(60 \mathrm{~g}\) and natural frequency \(150 \mathrm{rad} / \mathrm{s}\). It is feared that the mass of the seismometer may affect the vibrations that
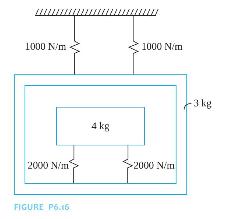
Calculate the natural frequencies and modal fractions for the system of Figure P6.16. 1000 N/m 1000 N/m 2000 N/m FIGURE P6.16 4 kg -3 kg >2000 N/m
Determine the forced response to the system of Figure P6.1 and Chapter Problems 6.1 and 6.10 if the left-hand mass is given an initial displacement of \(0.001 \mathrm{~m}\) while the right-hand mass is held in equilibrium and the system is released from rest.Data From Problem 6.1:Derive the
Determine the response of the system of Figure P6.2 and Chapter Problems 6.2 and 6.11 if the particle is given an initial velocity of \(2 \mathrm{~m} / \mathrm{s}\) when the system is in equilibrium.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of Figure P6.2 if
Determine the response of the system of Figure P6.4 and Chapter Problems 6.4 and 6.13 if the right-hand disk is given an angular displacement of \(2^{\circ}\) clockwise from equilibrium and the left-hand disk is given an angular displacement of \(2^{\circ}\) counterclockwise.Data From Chapter
Determine the response of the system of Chapter Problem 6.14 if the crane is disturbed resulting in an initial velocity of \(10 \mathrm{~m} / \mathrm{s}\) downward.Data From Chapter Problem 6.14:An overhead crane is modeled as a two degree-of-freedom system as shown in Figure P6.14. The crane is
Determine the output from the seismometer of Chapter Problem 6.15 if the \(60 \mathrm{~g}\) mass is given an initial velocity of \(15 \mathrm{~m} / \mathrm{s}\). Use a two degree-of-freedom system, remembering that the seismometer records the relative displacement between the seismic mass and the
Determine the free response of the system of Figure P6.6 if the left-hand mass is given an initial displacement of \(0.001 \mathrm{~m}\) while the right-hand mass is held in equilibrium and the system is released from rest. Use \(m=1 \mathrm{~kg}, k=10,000 \mathrm{~N} / \mathrm{m}\), and \(c=100
Determine the response of the system of Figure P6.7 if the lower mass is given a displacement from equilibrium of \(0.004 \mathrm{~m}\) and the upper mass is held in its equilibrium position and the system is released. Use \(m=5 \mathrm{~kg}, k=4000 \mathrm{~N} / \mathrm{m}\), and \(c=30
Determine the free response of the system of Figure P6.8 if the machine tool has initial velocities of \(\dot{x}(0)=0.8 \mathrm{~m} / \mathrm{s}\) and \(\dot{\theta}(0)=5 \mathrm{rad} / \mathrm{s}\). if \(I=0.03 \mathrm{~kg} \cdot \mathrm{m}^{2}\), \(c=100 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m},
Determine the principal coordinates for the system of Figure P6.1 and Chapter Problem 6.10. Write the differential equations which the principal coordinates satisfy.Data From Chapter Problem 6.10:Determine the natural frequencies of the system of Figure P6.1 if \(m=10 \mathrm{~kg}\) and \(k=1
Determine the principal coordinates for the system of Figure P6.2 and Chapter Problem 6.11. Write the differential equations which the principal coordinates satisfy.Data From Chapter Problem 6.1:Determine the natural frequencies of the system of Figure P6.2 if \(m=2 \mathrm{~kg}\), \(L=1
Determine the principal coordinates for the system of Figure P6.3 and Chapter Problem 6.12. Write the differential equations which the principal coordinates satisfy.Data From Chapter Problem 6.12:Determine the natural frequencies of the system of Figure P6.3 if \(m=30 \mathrm{~g}\), \(I_{1}=8
Determine the principal coordinates for the system of Figure P6.4 and Chapter Problem 6.13. Write the differential equations which the principal coordinates satisfy.Data From Chapter Problem 6.13:Determine the natural frequencies of the system of Figure P 6.4 if \(I_{1}=0.3 \mathrm{~kg} \cdot
Determine the principal coordinates for the system of Figure P6.8 if it had no damping. Write the differential equations which the principal coordinates satisfy. Use \(I=0.03 \mathrm{~kg} \cdot \mathrm{m}^{2}, m=3 \mathrm{~kg}, a=0.03 \mathrm{~m}, b=0.3 \mathrm{~m}\) and \(k=3000 \mathrm{~N} /
Determine the principal coordinates for the system of Chapter Problem 6.9. Write the differential equations which the principal coordinates satisfy. if \(I=0.03 \mathrm{~kg} \cdot \mathrm{m}^{2}, c=0 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}, m=3 \mathrm{~kg}, a=0.3 \mathrm{~m}, b=0.4 \mathrm{~m}\)
Determine the response of the system of Figure P6.1 and Chapter Problem 6.10 due to a sinusoidal force \(200 \sin 110 t \mathrm{~N}\) applied to the block whose displacement is \(x_{1}\) using the method of undetermined coefficients.Data From Chapter Problem 6.10:Determine the natural frequencies
Determine the response of the system of Figure P6.1 and Chapter Problem 6.10 due to a sinusoidal force \(200 \sin 80 t\) applied to the block whose displacement is \(x_{2}\) using the Laplace transform method.Data From Chapter Problem 6.10:Determine the natural frequencies of the system of Figure
Determine the response of the system of Figure P6.2 and Chapter Problem 6.11 due to a sinusoidal force \(100 \sin 70 t \mathrm{~N}\) applied to the particle using the method of undetermined coefficients.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of Figure P6.2 if
Determine the response of the system of Figure P6.2 and Chapter Problem 6.11 due to a sinusoidal moment \(50 \sin 90 t \mathrm{~N} \cdot \mathrm{m}\) applied to the bar using the method of undetermined coefficients.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of
Determine the response of the system of Figure P6.1 and Chapter Problem 6.10 due to(a) a unit impulse applied to the block whose displacement is \(x_{1}\), and(b) a unit impulse applied to the block whose displacement is \(x_{2}\).Data From Chapter Problem 6.10:Determine the natural frequencies of
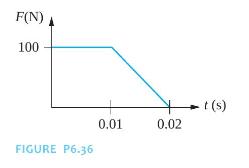
Determine the response of the system of Figure P6.1 and Chapter Problem 6.10 due to the force of Figure P6.36 applied to the block whose displacement is \(x_{1}\).Data From Chapter Problem 6.10:Determine the natural frequencies of the system of Figure P6.1 if \(m=10 \mathrm{~kg}\) and \(k=1 \times
Determine the response of the system of Figure P6.2 and Chapter Problem 6.11 due to a unit impulse applied to the particle.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of Figure P6.2 if \(m=2 \mathrm{~kg}\), \(L=1 \mathrm{~m}\) and \(k=1000 \mathrm{~N} /
Determine the response of the system of Figure P6.2 and Chapter Problem 6.11 due to a unit impulsive moment applied to the bar.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of Figure P6.2 if \(m=2 \mathrm{~kg}\), \(L=1 \mathrm{~m}\) and \(k=1000 \mathrm{~N} /
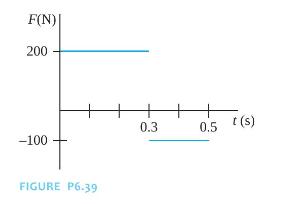
Derive the response of the system of Figure P6.2 and Chapter Problem 6.11 due to the force of Figure P6.39 applied downward to the end of the bar.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of Figure P6.2 if \(m=2 \mathrm{~kg}\), \(L=1 \mathrm{~m}\) and \(k=1000
Derive the response of the system of Figure P6.2 and Chapter Problem 6.11 due to a moment \(M(t)=10 e^{-2 t} \mathrm{~N} \cdot \mathrm{m}\) applied to the bar.Data From Chapter Problem 6.11:Determine the natural frequencies of the system of Figure P6.2 if \(m=2 \mathrm{~kg}\), \(L=1 \mathrm{~m}\)
Determine the response of the system of Figure P6.6 due to a force \(F(t)=20 \sin 20 t \mathrm{~N}\) applied to the block whose displacement is \(x_{2}\) using the method of undetermined coefficients. Use \(m=10 \mathrm{~kg}, k=90,000 \mathrm{~N} / \mathrm{m}\), and \(c=100 \mathrm{~N} \cdot
Determine the response of the system of Figure 6.7 due to a force \(F(t)=\) \(40 \sin 60 t \mathrm{~N}\) applied to the block whose displacement is \(x_{1}\) using the method of undetermined coefficients. Use \(m=20 \mathrm{~kg}, k=200,000 \mathrm{~N} / \mathrm{m}\), and \(c=400 \mathrm{~N} \cdot
Determine the response of the system of Figure P6.8 due to a unit impulse applied at the mass center. Use \(m=100 \mathrm{~kg}, I=4.5 \mathrm{~kg} \cdot \mathrm{m}^{2}, k=200,000 \mathrm{~N} / \mathrm{m}\), \(c=500 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}, b=2 \mathrm{~m}\), and \(a=1
Determine the response of the system of Figure P6.8 and Chapter Problem 6.43 to a unit impulse applied \(t\) to the right end or the machine tool using \(x\) and \(\theta\) as generalized coordinates.Data From Chapter Problem 6.43:Determine the response of the system of Figure P6.8 due to a unit
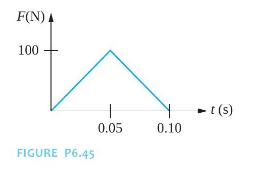
Determine the response of the system of Figure P6.8 and Chapter Problem 6.43 to the force shown in Figure P6.45 applied at the right end of the machine tool.Data From Chapter Problem 6.43:Determine the response of the system of Figure P6.8 due to a unit impulse applied at the mass center. Use
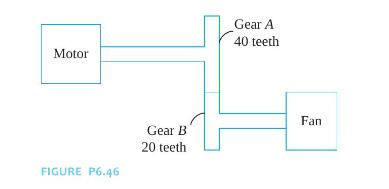
A schematic of part of a power transmission system is shown in Figure P6.46. A motor of moment of inertia \(I=100 \mathrm{~kg} \cdot \mathrm{m}^{2}\) is mounted on a shaft of shear modulus \(G=80 \times 10^{9} \mathrm{~N} / \mathrm{m}^{2}\), polar moment of inertia \(J=2.3 \times 10^{-4}
Showing 800 - 900
of 4547
First
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Last
Step by Step Answers