New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
applied linear algebra
Applied Linear Algebra 2nd Edition Peter J. Olver, Chehrzad Shakiban - Solutions
Let λ, c ∈ R. Solve the affine or inhomogeneous linear iterative equationDiscuss the possible behaviors of the solutions. Write the solution in the form u(k) = u⋆ + ν(k), where u⋆ is the equilibrium solution. ,(k+1) U = Xy (k) + c₂ U (0)
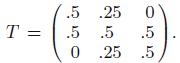
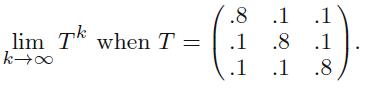
A certain plant species has either red, pink, or white flowers, depending on its genotype. If you cross a pink plant with any other plant, the probability distribution of the offspring is prescribed by the transition matrix On average, if you continue crossing with only pink plants, what percentage
Suppose u(0) = 1. Find u(1), u(10), and u(20) when (a) u(k+1) = 2u(k),(b) u(k+1) = −.9u(k),(c) u(k+1) = i u(k),(d) u(k+1) = (1 − 2 i)u(k)
Let v = x + i y be an eigenvector corresponding to a complex, non-real eigenvalue of the real n × n matrix A.(a) Prove that the Krylov subspaces V(k) for k ≥ 2 generated by both x and y are all two-dimensional. (b) Is the converse valid? Specifically, if dim V(3) = 2, then all
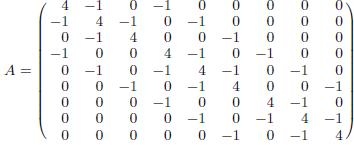
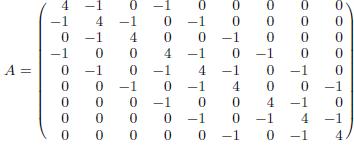
Use GMRES to solve the system in Exercise 9.4.33. Compare the rate of convergence with the CG algorithm in Exercise 9.6.8.Data From Exercise 9.4.33The matrix arises in the finite difference (and finite element) discretization of the Poisson equation on a nine point square grid. Solve the
(a) Prove that the dimension of a Krylov subspace is bounded by the degree of theminimal polynomial of the matrix A, as defined in Exercise 8.6.23. (b) Is there always a Krylov subspace whose dimension equals the degree of the minimal polynomial?Data From Exercise 8.6.23Let A be an n × n
A study has determined that, on average, a man’s occupation depends on that of his father. If the father is a farmer, there is a 30% chance that the son will be a blue collar laborer, a 30% chance he will be a white collar professional, and a 40% chance he will also be a farmer. If the father is
Fill in the details in a direct derivation of the Conjugate Gradient algorithm following the ideas outlined in the text: starting with the initial guess x0 and corresponding residual vector w1 = r0 = b, at the kth step in the algorithm, given the approximation xk and residual rk = b − Axk, the
True or false: A Krylov subspace is an invariant subspace for the matrix A.
Prove that all of the matrices Ak defined in (9.83) have the same eigenvalues. A = Ao = QoRo, Ak+1 = RkQk=Qk+1 Rk+1) k = 0, 1, 2, ... 3 (9.83)
What is the minimal period of a function of the form assuming that each fraction is in lowest terms, i.e., its numerator and denominator have no common factors? cos t + cos t, T S
Let A = A: = (₂ 0 2π 2T). Show that e I.
Write the Haar scaling function and mother wavelet as linear combinations of step functions.
A student has the habit that if she doesn’t study one night, she is 70% certain of studying the next night. Furthermore, the probability that she studies two nights in a row is 50%. How often does she study in the long run?
Which of the 14 possible two-dimensional phase portraits can occur (a) For a linear gradient flow (10.19)? (b) For a linear Hamiltonian system (10.25)? du dt = -Ku, (10.19)
Prove that if A is any square matrix, then there exists c ≠ 0 such that the scalar multiple c A is a convergent matrix. Find a formula for the largest possible such c.
Which of the 14 possible two-dimensional phase portraits can occur for the phase plane equivalent (10.8) of a second order scalar ordinary differential equation? ú= Au, where - (u₂(t)). u(t) = A = 0 -B -α (10.8)
A 6 kilogram mass is connected to a spring with stiffness 21 kg/sec2. Determine the frequency of vibration in hertz (cycles per second).
The lowest audible frequency is about 20 hertz = 20 cycles per second. How small a mass would need to be connected to a unit spring to produce a fast enough vibration to be audible?
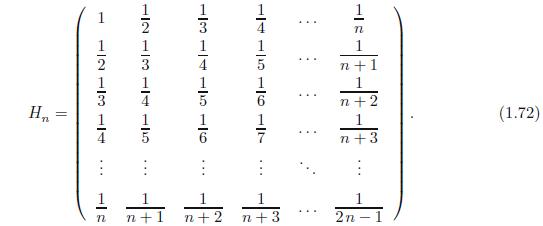
True or false: The system u̇ = −Hnu, where Hn is the n × n Hilbert matrix (1.72), is asymptotically stable. n+ n+ 2 n- : ... ... H, = 111 111 | NT 11111161811 : : : 바바라 (1.72) :
A mass m = 25 is attached to a unit spring with k = 1, and frictional coefficient β = .01. The spring will break when it moves more than 1 unit. Ignoring the effect of the transient, what is the maximum allowable amplitude α of periodic forcing at frequency γ =(a) .19 ? (b) .2 ? (c)
(a) For what range of frequencies Υ can you force the mass in Exercise 10.6.4 with amplitude α = .5 without breaking the spring? (b) How large should the friction be so that you can safely force the mass at any frequency?Data From Exercise 10.6.4A mass m = 25 is attached to a unit spring
What is etO where O is the n × n zero matrix?
Find all matrices A such that etA = O.
Determine whether the following vector-valued functions are linearly dependent or linearly independent:(a)(b)(c)(d)(e)(f)(h)(i) -t (1). (-¹)
(i) Combine Exercises 10.1.23–24 to show that if A = SS−1 is diagonalizable, then the solution to u̇ = Au can be written as u(t) = S (c1 eλ1 t, . . . , cn eλn t)T, where λ1, . . . , λn are its eigenvalues and S = (v1 v2 . . . vn) is the corresponding matrix of eigenvectors.Data From
Let(a) Show that the solution to the linear system ẋ = Ax represents a rotation of R3 around the z-axis. What is the trajectory of a point x0? (b) Show that the solution to the inhomogeneous system ẋ = Ax + b represents a screw motion of R3 around the z-axis. What is the trajectory of a
(a) Under the assumption that u1, . . . , uk form a Jordan chain for the coefficient matrix A, prove that the functions (10.17) are solutions to the system u̇ = Au.(b) Prove that they are linearly independent. u1(t)=e^w1, u₂ (t) = e(t w₁ + W₂), u; (t) = ext and, in general, u₂(t) =
True or false: The solution to the non-autonomous initial value problem ú= A(t) u, u(0) = b, is u(t) = exp A(s) dsb.
Suppose that u(t) ∈ Rn is a polynomial solution to the constant coefficient linear system u̇ = Au. What is the maximal possible degree of u(t)? What can you say about A when u(t) has maximal degree?
Show that if u(t) is a solution to u̇ = Au, and S is a constant, nonsingular matrix of the same size as A, then v(t) = Su(t) solves the linear system v̇ = Bv, where B = SAS−1 is similar to A.
Find the solution to the system of differential equations with initial conditions u(0) = 3 and ν(0) = −2. du dt = 3u +4v, dv dt = = 4u-3v,
Given the circuit in Exercise 10.6.14, over what range of frequencies Υ can you supply a unit amplitude periodic current source?Data From Exercise 10.6.14A circuit with R = .002, L = 12.5, and C = 50 can carry a maximum current of 250. Ignoring the effect of the transient, what is the
How large should the resistance in the circuit in Exercise 10.6.14 be so that you can safely apply any unit amplitude periodic current?Data From Exercise 10.6.14A circuit with R = .002, L = 12.5, and C = 50 can carry a maximum current of 250. Ignoring the effect of the transient, what is the
True or false: If the Hamiltonian system for H(u, v) is stable, then the corresponding gradient flow u̇ = −∇H is stable.
True or false: If K is positive semi-definite, then the zero solution to u̇ =−Ku is stable.
True or false: (a) If trA > 0, then the system u̇ = Au is unstable.(b) If detA > 0, then the system u̇ = Au is unstable.
True or false:(a) eA−1 = (eA)−1; (b) eA+A−1 = eA eA−1.
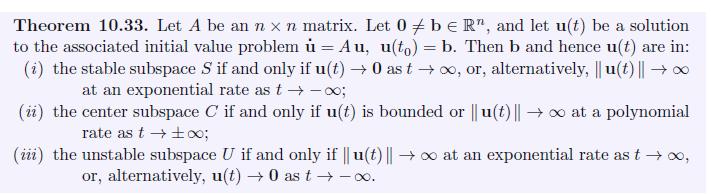
Find the (real) stable, unstable, and center subspaces of the following linear systems:(a)(b)(c)(d)(e)(f)(g) ů₁ =9u2₂, U₂ = -²
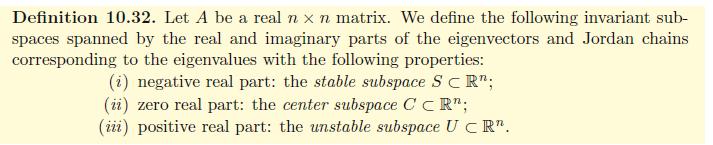
State and prove a counterpart to Definition 10.32 and Theorem 10.33 for a homogeneous linear iterative system. Definition 10.32. Let A be a real n x n matrix. We define the following invariant sub- spaces spanned by the real and imaginary parts of the eigenvectors and Jordan chains corresponding to
(a) Given a homogeneous linear dynamical system with invariant stable, unstable, and center subspaces S, U,C, explain why the origin is asymptotically stable if and only if C = U = {0}.(b) Is the origin stable if U = {0} but C ≠ {0}?
Prove that a cubic B spline, as defined in Exercise 5.5.76, solves the dilation equation (9.138) for c0 = c4 = 1/8, c1 = c3 = 1/2, c2 = 3/4.Data From Exercise 5.5.76A bell-shaped or B-spline u = β(x) interpolates the data(a) Find the explicit formula for the natural B-spline and plot its
Consider the dilation equation (9.138) with c0 = 0, c1 = c2 = 1, so φ(x) = φ(2x − 1) + φ (2x − 2). Prove that ψ(x) = φ(x + 1) satisfies the Haar dilation equation (9.139). Generalize this result to prove that we can always, without loss of generality, assume that c0 ≠ 0 in the general
Explain why the QR algorithm fails to find the eigenvalues of the matrices(a)(b)(c) 1 1 0
True or false: If a system Au = b has a strictly diagonally dominant coefficient matrix A, then the equivalent system obtained by applying an elementary row operation to A also has a strictly diagonally dominant coefficient matrix.
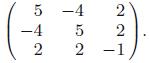
Find lim Tk when T = k→∞ .8 1.1 .1.8.1 .1 .1.8
Use the direct gradient descent algorithm (9.120) using the value of dk found in Exercise 9.6.14 to solve the linear systems in Exercise 9.6.7. Compare the speed of convergence with that of the Conjugate Gradient Method.Data From Exercise 9.6.14In (9.120), find the value of dk that minimizes
Prove that the most general solution to the functional equation φ(x) = 2 φ(2x) is φ(x) = ƒ(log2 x)/x where ƒ(z + 1) = ƒ(z) is any 1 periodic function.
True or false:(a) ρ(cA) = c ρ(A),(b) ρ(S−1AS) = ρ(A),(c) ρ(A2) = ρ(A)2,(d) ρ(A−1) = 1/ρ(A),(e) ρ(A + B) = ρ(A) + ρ(B),(f) ρ(AB) = ρ(A) ρ(B).
Explain why the scaling function φ(x) and the mother wavelet ω(x) have the same support: supp φ = supp ω.
Prove that (9.147) implies φ(x − l), φ(x − m) = 0 for all l ≠ m. (4(x), 4(x − m)) = 4(x) 4(x − m) dx = 0 ∞ for all m = 0. (9.147)
Describe the final state of a Markov chain with symmetric transition matrix T = TT.
Prove the formulas in Proposition 9.60 for the norms of the mother and daughter wavelets. Proposition 9.60. All integer translates (x - k), for k € Z of the Daubechies scaling function, and all wavelets wj,k(x) = w(2¹ x − k), j ≥ 0, are mutually orthogonal functions with respect to the L²
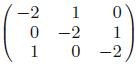
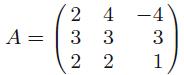
Let Find the spectral radius of the Jacobi and Gauss–Seidel iteration matrices, and discuss their convergence. A = 4 -4 24 3 3 2 2 31 1
(a) Explain what happens to the GMRES algorithm if the right-hand side b of the linear system Ax = b is an eigenvector of A.(b) More generally, prove that if the Krylov subspaces generated by b stabilize at order m, then the solution to the linear system lies in V(m) and so the GMRES algorithm
Find the values of the Daubechies scaling function φ(x) and mother wavelet ω(x) at x (a) 1/2, (b) 1/4, (c) 5/16.
Explain in what sense the GMRES approximation xk+1 of order k + 1 is a better approximation to the true solution than that of order k, namely xk.
(a) Prove that the scaling function φ(x) and the mother wavelet ω(x) are orthogonal.(b) Prove that the integer translates w(x − m) of the mother wavelet are mutually orthogonal. (c) Prove orthogonality of all the wavelet offspring ωj,k(x).
True or false: If T and TT are both transition matrices, then T = TT.
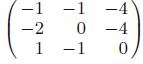
Is GMRES able to solve the system in Exercise 9.6.10?Data From Exercise 9.6.10Try applying the Conjugate Gradient algorithm to the system −x + 2y + z = −2, y + 2z = 1, 3x + y − z = 1. Do you obtain the solution? Why or why not?
Let φ(x) be any scaling function, ω(x) the corresponding mother wavelet and ωj,k(x) the wavelet descendants. Prove that (a) ΙΙφΙΙ = ΙΙωΙΙ. (b) ΙΙωj,k ΙΙ = 2−j ΙΙφΙΙ.
Consider the linear system H5u = e1, where H5 is the 5 × 5 Hilbert matrix. Does the Jacobi Method converge to the solution? If so, how fast? What about Gauss–Seidel?
Suppose the largest entry (in modulus) of A is |aij| = a⋆. Can you bound its radius of convergence?
Suppose V ⊂ Rn is an invariant subspace for the n × n matrix T governing the linear iterative system u(k+1) = Tu(k). Prove that if u(0)∈ V , then so is the solution: u(k) ∈ V.
Prove that the spectral radius function does not satisfy the triangle inequality by finding matrices A, B such that ρ(A + B) > ρ(A) + ρ(B).
Given the general solution (9.9) of the iterative system u(k+1) = Tu(k), write down the solution to v(k+1) = αT v(k) + β v(k), where α, β ∈ R. u(k)=₁ X₁v₁ + ₂X₁₂ V₂ + : + ₂√ √ns (9.9)
Show that if |c| < 1 / ΙΙAΙΙ, then c A is a convergent matrix.
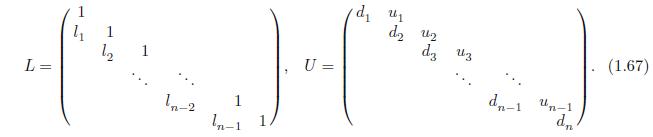
Prove that in the H = LU factorization of a regular upper Hessen berg matrix, the lower triangular factor L is bidiagonal, as in (1.67). L= 4₁ 1 12 1 1₁-2 -1 1 U = d₁ ₁ d₂ u₂ dz uz dn' (1.67)
Discuss the stability of each fixed point and the asymptotic behavior(s) of the solutions to the systems in Exercise 9.2.23. Which fixed point, if any, does the solution with initial condition u(0) = e1 converge to?Data From Exercise 9.2.23Find all fixed points for the iterative systems with the
True or false: If every point u ∈ Rn is a fixed point, then they are all stable. Can you characterize such systems?
True or false: If T has a stable nonzero fixed point, then it is a convergent matrix.
Find the general solution to the iterative system where we set u(k+1) = u(k) ₁ - 2 (k) + u ₁+1, i = 1,..., n,
(a) Use (9.142) to construct the “mother wavelet” corresponding to the hat function (9.140). (b) Is the hat function orthogonal to the mother wavelet? (c) Is the hat function orthogonal to its integer translates? Р w(x) = Σ (−1)k cp_k P (2x − k) k=0 = cp (2x) - Cp-1' 14(2x − 1) + Cp_2
Find dyadic approximations, with error at most 2−8, to(a) 3/4,(b) 1/3,(c) √2,(d) e, (e) π.
Prove that a real number x is dyadic if and only if its binary (base 2) expansion terminates, i.e., is eventually all zeros.
Let φ(x) satisfy the Daubechies scaling equation (9.153). Prove that if φ(i) ≠ 0 for any i ≤ 0 or i ≥ p, then supp φ is unbounded. p(x)= || 1+√3 4 y(2x) + 3+√3 4 3-√√√3 4 (2x-1) +- ²4 (2x − 2) + ¹ = 1 -y(2x - 3). 1-√√√3 (9.153)
Write down an example of (a) An irregular transition matrix;(b) A regular transition matrix that has one or more zero entries.
True or false: The iterative system (9.156) is a Markov process. v(n+1) = Av(n) (9.156)
Suppose you have n dollars and can buy coffee for $1, milk for $2, and orange juice for $2. Let C(n) count the number of different ways of spending all your money.(a) Explain why C(n) = C(n−1) + 2C(n−2), C(0) = C(1) = 1.(b) Find an explicit formula for C(n).
Every probability vector in Rn lies on the unit sphere for the(a) 1 norm, (b) 2 norm, (c) ∞ norm, (d) All of the above, (e) None of the above.
Write a computer program to zoom in on the Daubechies scaling function and discuss what you see.
True or false: ΙΙwΙΙ ≤ ΙΙvΙΙ + ΙΙvΙΙ + wΙΙ for all v, w ∈ V.
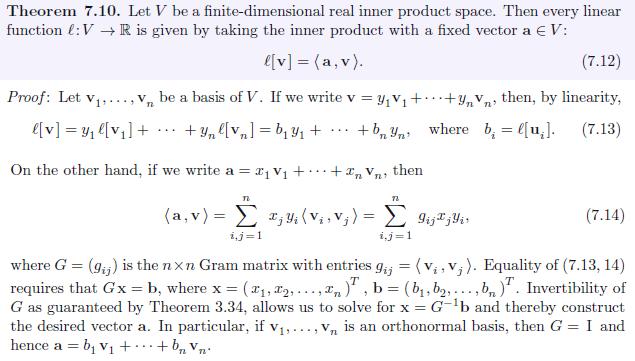
Let V be a finite-dimensional real inner product space and let V∗ be its dual. Using Theorem 7.10, prove that the map J: V∗ → V that takes the linear function ℓ ∈ V∗ to the vector J[ℓ] = a ∈ V satisfying ℓ[v] = (a , v) defines a linear isomorphism between the inner product
Find the dual basis, as defined in Exercise 7.1.32, for the monomial basis of P(2) with respect to the L2 inner product Data From Exercise 7.1.32Dual Bases: Given a basis v1, . . . , vn of V, the dual basis ℓ1, . . . , ℓn of V∗ consists of the linear functions uniquely defined by the
Describe the image of the line ℓ that goes through the points under the linear transformation 1 (-²).(-2) 1
True or false: The set of linear transformations L:R3 → R3 such that is a subspace of L(R3,R3). If true, what is its dimension? 0 L -(1)-() 0
Find a linear function L: R2 → R2 such that and L 2 (2) = (-²)
True or false: The set of linear transformations L: R2 → R2 such that is a subspace of L(R2, R2). If true, what is its dimension? ¹ (6) = (8) L
Explain why the translation function T: R2 → R2, defined by for a, b ∈ R, is almost never linear. Precisely when is it linear? T X Y x + a y+b
Repeat Exercise 4.2.17 using the numerically stable algorithm (4.28) and check that you get the same result. Which of the two algorithms was easier for you to implement?Data From Exercise 4.2.17Use the modified Gram-Schmidt process (4.26–27) to produce orthonormal bases for the spaces spanned
Write the quadratic form in the form q(x) = xTK x for some symmetric matrix K. Is q(x) positive definite? q(x) = x+TV+20-V+30
Let L: V → W be a linear function. Suppose M, N: W → V are linear functions that satisfy L ◦ M = IV = N ◦ L. Prove that M = N = L−1. Thus, a linear function may have only a left or a right inverse, but if it has both, then they must be the same.
True or false: The quadratic form Q(v) = vTKv defined by a symmetric n × n matrix K defines a linear function Q: Rn → R.
Is the Euclidean norm function N(v) = ΙΙ v ΙΙ, for v ∈ Rn, linear?
Show that is a null direction for but x ∉ ker K. X = 1
For any integer k, prove that ekπ i = (−1)k.
Show that −|z| ≤ Re z ≤ |z| and − |z| ≤ Im z ≤ |z|.
Carefully prove that ΙΙ (x, y)T ΙΙ =| x | + 2 | x − y |defines a norm on R2.
Write down a nonsingular symmetric matrix that is not positive or negative definite.
Prove that x ∈ Rn solves the linear system A x = b if and only if xT AT v = bT v for all v ∈ Rm. The latter is known as the weak formulation of the linear system, and its generalizations are of great importance in the study of differential equations and numerical analysis, [61].
Showing 100 - 200
of 333
1
2
3
4
Step by Step Answers