New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
Computer science
systems analysis and design
control system analysis and design
Control System Analysis And Design 2nd Edition A.K. Tripathi - Solutions
Which one of the following pairs is NOT correctly matched; (input \(=x(t)\) and output \(=y(t))\)(a) Unstable system\(\frac{d y(t)}{d t}-0.1 y(t)=x(t)\)(b) Nonlinear system .... \(\frac{d y(t)}{d t}+2 t^{2} y(t)=x(t)\)(c) Noncausal system\(y(t)=x(t+2)\)(d) Nondynamic system .... \(y(t)=3 x^{2}(t)\).
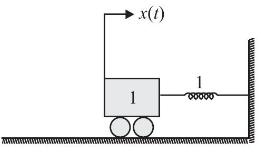
Consider the mechanical system shown below. If the system is set into motion by unit impulse force, the equation of the resulting oscillation will be:(a) \(x(t)=\sin t\)(b) \(x(t)=\sqrt{2} \sin t\)(c) \(x(t)=\frac{1}{2} \sin 2 t\)(d) \(x(t)=\sin \sqrt{2} t\) 20000 OO 1 wwwwww
The open loop DC gain of unity negative feedback system with closed-loop transfer function \(\frac{s+4}{s^{2}+7 s+13}\) is(a) \(\frac{4}{13}\)(b) \(\frac{4}{9}\)(c) 4(d) 13
Choose the correct matching:(P) \(a_{1} \frac{d^{2} y}{d x^{2}}+a_{2} y \frac{d y}{d x}+a_{3} y=a_{4}\)(Q) \(a_{1} \frac{d^{3} y}{d x^{3}}+a_{2} y=a_{3}\)(R) \(a_{1} \frac{d^{2} y}{d x^{2}}+a_{2} x \frac{d y}{d x}+a_{3} x^{2} y=0\)(1) Non-linear differential equation(2) Linear differential equation
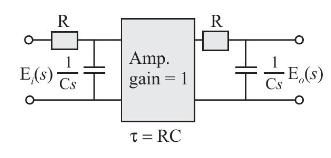
The transfer function of the system shown below is(a) \(\frac{1}{1+\tau s}\)(b) \(\frac{1}{(1+\tau s)^{2}}\)(c) \(\frac{\tau s}{1+\tau s}\)(d) \(\frac{\tau s}{(1+\tau s)^{2}}\) E,(s) R Cs Amp. gain = 1 t = RC R Cs E (s)
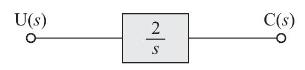
Consider a system shown below:If the system is disturbed so that \(c(0)=1\), then \(c(t)\) for a unit step input will be(a) \(1+t\)(b) \(1-t\)(c) \(1+2 t\)(d) \(1-2 t\) U(s) 2 S C(s)
The impulse response of an initially relaxed linear system is \(e^{-2 t} u(t)\). To produce a response of \(t e^{-2 t} u(t)\), the input must be equal to(a) \(2 e^{-t} u(t)\)(b) \((1 / 2) e^{-2 t} u(t)\)(c) \(e^{-2 t} u(t)\)(d) \(e^{-t} u(t)\)
The unit impulse response of a unity feedback control system is given by;\[c(t)=-t e^{-t}+2 e^{-t},(t \geq 0)\]The open loop transfer function is equal to(a) \(\frac{(s+1)}{(s+2)^{2}}\)(b) \(\frac{2 s+1}{s^{2}}\)(c) \(\frac{s+1}{(s+1)^{2}}\)(d) \(\frac{s+1}{s^{2}}\)
The system has a transfer function \(\mathrm{P}(\mathrm{s})=\frac{2}{s+2}\). The gain for \(\omega=2 \mathrm{rad} / \mathrm{sec}\) will be(a) 0.707(b) 0.666(c) 0.5(d) 0.25
A linear time-invariant system initially at rest, when subjected to a unit-step input gives a response \(y(t)=t e^{-t} ; t>0\). The transfer function of the system is(a) \(\frac{1}{(s+1)^{2}}\)(b) \(\frac{1}{s(s+1)^{2}}\)(c) \(\frac{s}{(s+1)^{2}}\)(d) \(\frac{1}{s(s+1)}\)
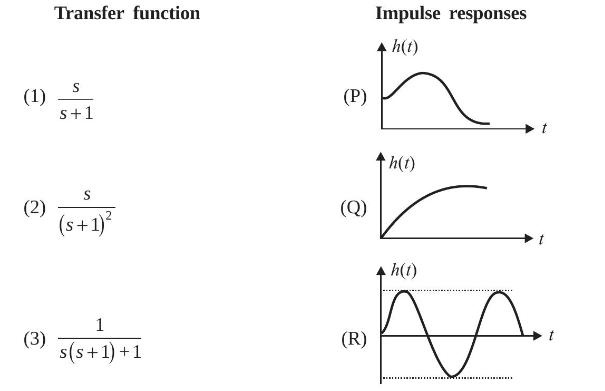
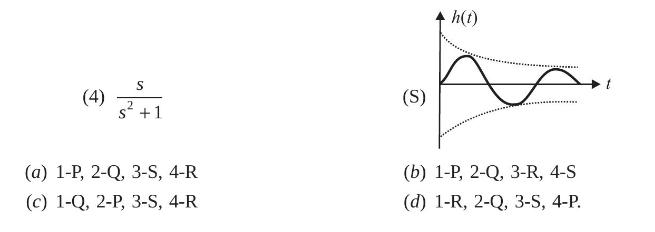
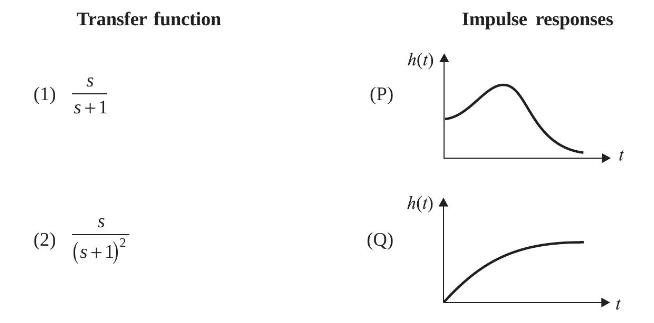
Match the following transfer functions and impulse responses: (1) (2) (3) Transfer function S s+1 S (s+1) 1 s(s+1) +1 (P) (Q) (R) Impulse responses h(t) h(t) h(1) A
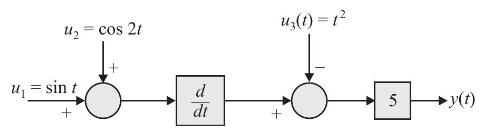
The output \(y(t)\) of figure shown below with three inputs \(u_{1}, u_{2}\) and \(u_{3}\) using superposition, is(a) \(y(t)=5\left(\cos t-2 \sin 2 t-t^{2}\right)\)(b) \(y(t)=5\left(\cos t+2 \sin 2 t-t^{2}\right)\)(c) \(y(t)=5\left(\cos t-2 \sin 2 t+t^{2}\right)\)(d) \(y(t)=5\left(\cos t+2 \sin 2
The unit step response of a system is\[y(t)=1-\frac{7}{3} e^{-t}+\frac{3}{2} e^{-2 t}-\frac{1}{6} e^{-4 t}\]The transfer function model of the system is(a) \(\frac{(s+8)}{(s+1)(s+2)(s+4)}\)(b) \(\frac{(s+4)}{(s+1)(s+2)(s+8)}\)(c) \(\frac{(s+1)}{(s+2)(s+4)(s+8)}\)(d) \(\frac{1}{(s+1)(s+2)(s+4)}\)
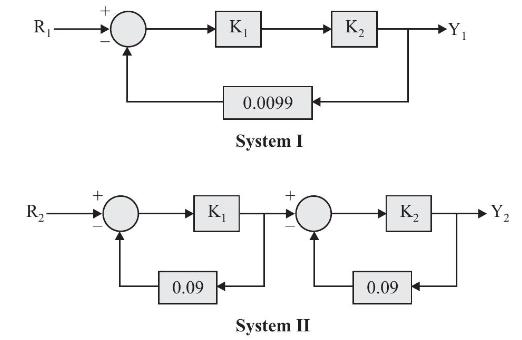
The figure shown below represents system I and system II. Now, consider following statements in respect of these systems when \(\mathrm{K}_{1}=\mathrm{K}_{2}=100\) nominally.1. System I and system II both have same transfer function model.2. The response of system II is ten times more sensitive to
A mercury thermometer was kept in ice \(\left(0^{\circ} \mathrm{C}\right)\) for an indefinite period. It was removed and immediately put in boiling water \(\left(100^{\circ} \mathrm{C}\right)\). It showed \(75^{\circ} \mathrm{C}\) after 2.5 seconds. Evaluate transfer function of thermometer.
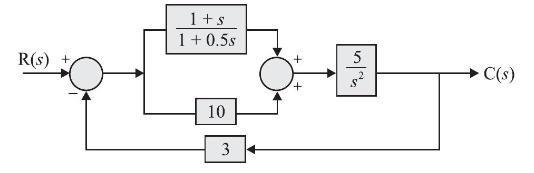
Transform the system of Fig. P2.2 into a unit feedback system. R(s) + 1+s 1 +0.5s 10 3 + + 5 S C(s)
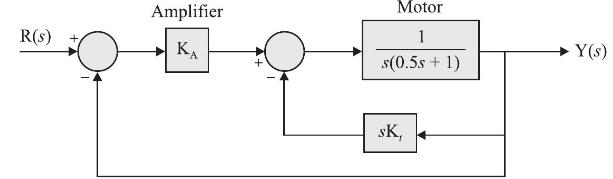
Block diagram model of a position control system is shown in Fig. P2.3:(a) In absence of derivative feedback ( \(\left.K_{t}=0ight)\), determine damping ratio of the system for amplifier gain \(\mathrm{K}_{\mathrm{A}}=5\). Also find the steady state error to unit ramp input.(b) Find suitable values
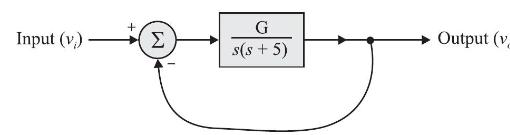
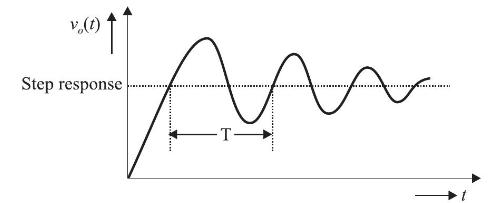
The block diagram of a feedback system is shown in Fig. P2.4 (a).(a) Find the closed loop transfer function.(b) Find the minimum value of \(\mathrm{G}\) for which the step response of the system would exhibit an overshoot, as shown in Fig. P2.4 (b)(c) For \(\mathrm{G}\) equal to twice the minimum
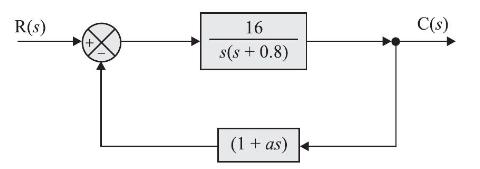
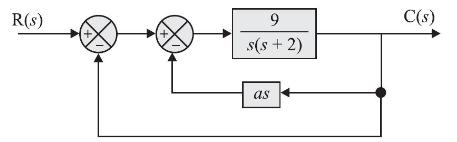
Consider the system shown in Fig. P 2.5. Determine the value of \(a\) such that the damping ratio is 0.5 . Also obtain the values of the rise time \(t_{r}\) and maximum overshoot \(\mathrm{M}_{\mathrm{p}}\) in its step response. R(S) 16 s(s+ 0.8) (1 + as) C(s)
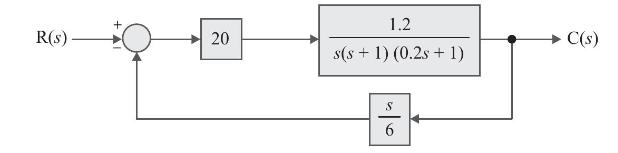
Consider the system shown in Fig. P2.6:(i) In the absence of derivative feedback \((a=0)\) determine the damping factor and natural frequency. Also determine the steady state error resulting from a unit ramp input.(ii) Determine the derivative feedback constant \(a\) which will increase the damping
For the system shown in Fig. P2.7, determine characteristic equation. Hence find the following when excitation is a unit step ;(a) undamped natural frequency(b) damped frequency of oscillation(c) damping ratio and damping factor(d) maximum overshoot(e) settling time.( \(f\) ) number of cycles
The open loop transfer function of a unity feedback system is\[\mathrm{G}(s)=\frac{k}{s(s+2)}\]It is specified that the response of the system to a unit step input should have maximum overshoot of \(10 \%\) and the settling time should be less than one second.(a) Is it possible to satisfy both the
The open loop transfer function of a unity feedback system is \(\mathrm{G}(s)=\frac{\alpha}{s(1+\beta s)}\). For this system overshoot reduces from 0.6 to 0.2 due to change in \(\alpha\) only. Show that\[\frac{\beta \alpha_{1}-1}{\beta \alpha_{2}-1} \cong 43\]where \(\alpha_{1}\) and \(\alpha_{2}\)
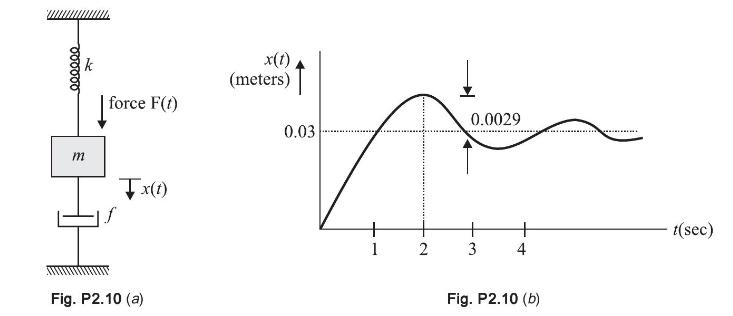
Fig. P2.10 (a). shows a mechanical vibratory system. When \(8.9 \mathrm{~N}\) force is applied to the system, the mass exhibits the dynamics as shown in Fig. P2.10(b). Compute \(m, f\) and \(k\) of the system. 000000 k m force F(t) if x(t) Fig. P2.10 (a) x(t) (meters) 0.03 1 2 0.0029 + + 3 4 Fig.
The forward transfer function of a unity feedback type 1, second order system has a pole at \(s=-3\). The gain \(k\) is adjusted for the damping ratio of 0.6 . Compute steady state error if this system is excited by \(r(t)=1+5 t\).
The open loop transfer function of unity feedback system is given by\[G(s)=\frac{40}{s(0.2 s+1)}\]Determine steady state error as a function of time for the input given by \(r(t)=(3+4 t) t\).
The closed loop transfer function of a system is given by\[\mathrm{T}(s)=\frac{\mathrm{C}(s)}{\mathrm{R}(s)}=\frac{k(s+z)}{s^{2}+4 s+8}\]where \(k\) and \(z\) are adjustable.(a) If \(r(t)=t\), find values of \(k\) and \(z\) so that steady state error is zero.(b) For the values of \(k\) and \(z\)
The closed loop transfer function of a position control system is given by\[\frac{\mathrm{C}(s)}{\mathrm{R}(s)}=\mathrm{T}(s)=\frac{k(s+z)(s+4)}{(s+p)\left(s^{2}+6 s+25ight)}\]where \(k, p\) and \(z\) are adjustable. Is it possible to select them so that system exhibits zero steady state error for
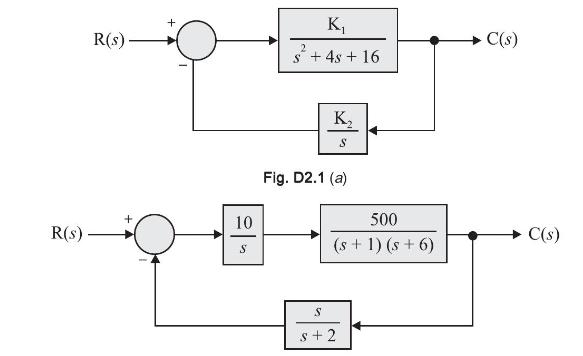
Identify order and type of systems shown in Fig. D2.1 (a) and (b). R(s) R(s) + + 10 S K 2 s + 4s + 16 K, S Fig. D2.1 (a) 500 (s + 1) (s+6) S s+2 C(s) C(s)
Determine which of the following second order systems are underdamped, which are critically damped and which are overdamped.(a) \(\mathrm{T}(s)=\frac{9 s^{2}+3 s+10}{s^{2}+5 s+2}\)(b) \(\mathrm{T}(s)=\frac{s^{2}-2 s}{s^{2}+6 s+9}\)(c) \(\mathrm{T}(s)=\frac{64}{3 s^{2}+4 s+5}\)(d)
Find the constant \(k\) for which the system with transfer function \(T(s)\) has the given second order response property.(a) \(\mathrm{T}(\mathrm{s})=\frac{10}{s^{2}+40 s+k}, \quad \xi=0.7\)(b) \(\mathrm{T}(s)=\frac{s^{2}-6}{k s^{2}+s+6}, \quad \omega_{n}=0.7\)
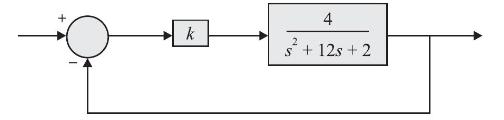
For the system shown in Fig. D2.4, find \(k\) for which damping ratio of overall system is 0.7 . For this value of \(\mathrm{K}\) find undamped natural frequency. k 4 2 s + 12s + 2
For the unity feedback system with the forward transmittance\[\mathrm{G}(s)=\frac{4(s+1)}{(s+2)(s+3)\left(s^{2}+s+10ight)}\]Find system type and if the response reaches steady state, find steady state output-input errors to unit step and to unit ramp inputs.
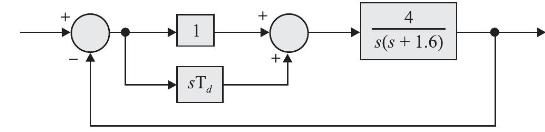
The Fig. D2.6 shows structure of a feedback control scheme. Determine \(T_{d}\) so that system exhibits critically damped dynamics. Compute its settling time. 1 sta ? 4 s(s+ 1.6)
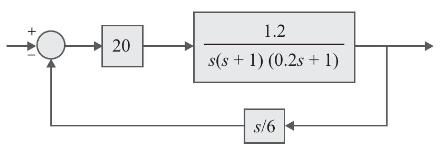
Fig. D2.7 shows a servo system. Determine(a) Characteristics equation(b) Undamped frequency of oscillation(c) Damping ratio(d) Damping factor(e) Peak overshoot(f) First undershoot(g) Time interval after which optima occur(h) Settling time(i) No. of cycles completed before response settles within
Compute static error coefficients for a unity feedback system with \(\mathrm{G}(s)=\frac{12}{s(s+6)}\). If input \(r(t)=4+3 t\), find steady state error. For this system if steady state error is to be reduced to \(10 \%\) of existing value, what should be percentage change in gain?
The open loop transfer function of a unity feedback control system is given by\[\mathrm{G}(s)=\frac{k}{s(s \mathrm{~T}+1)}\](a) By what factor gain \(\mathrm{k}\) should be multiplied so that damping ratio increases from 0.2 to 0.8 ?(b) By what factor the time constant \(\mathrm{T}\) should be
The dynamics of a servo mechanism is characterised by\[\ddot{y}+4.8 \dot{y}=144 e\]where \(e=c-0.5 y\) is error signal.(a) Sketch block diagram of system(b) Find damping ratio, damped and undamped frequency of oscillations.
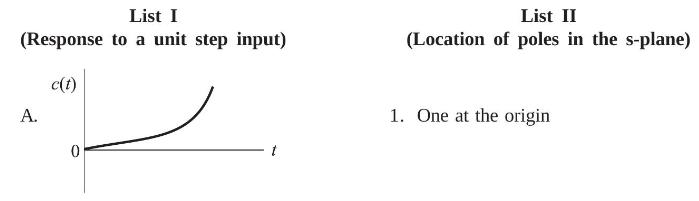
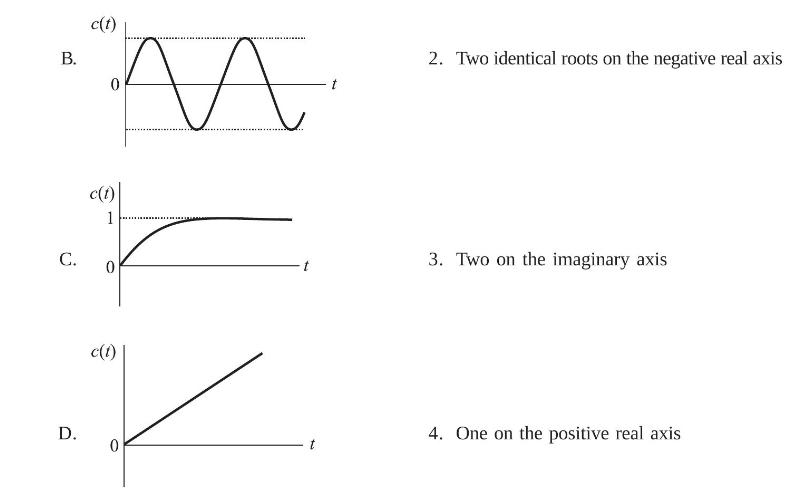
Match List-I with List-II and select the correct answer using the codes given below the lists: (Response c(t) A. 0 List I to a unit step input) List II (Location of poles in the s-plane) 1. One at the origin
The open-loop transfer function of a unity feedback control system is given by \(\mathrm{G}(s)=\frac{\mathrm{K}}{s(s+1)}\). If the gain \(\mathrm{K}\) is increased to infinity, then the damping ratio will tend to become:(a) \(\frac{1}{\sqrt{2}}\)(b) 1(c) 0\((d) \infty\)
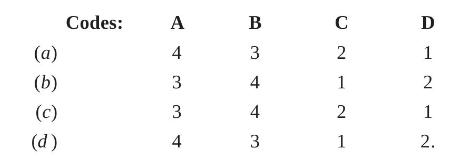
In the given figure, spring constant is K, viscous friction coefficient is B, mass is M and the system output motion is \(y(t)\) corresponding to input force \(\mathrm{F}(t)\). Which of the following parameters relate to the above system:1. Time constant \(=\frac{1}{\mathrm{M}}\)2. Damping
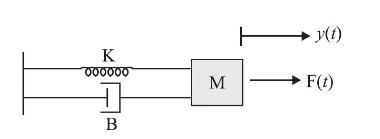
The system shown in the given figure has a unit step input ;In order that the steady state error is 0.1 , the value of \(\mathrm{K}\) required is:(a) 0.1(b) 0.9(c) 1.0(d) 9.0 R- + K (s + 1) (0.1s + 1) C
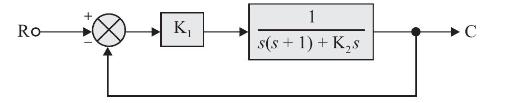
The system shown in the given figure has a second order response with a damping ratio of 0.6 and a frequency of damped oscillations of \(10 \mathrm{rad} / \mathrm{sec}\). The values of \(\mathrm{K}_{1}\) and \(\mathrm{K}_{2}\) are respectively :(a) 12.5 and 15(b) 156.25 and 15(c) 156.25 and 14(d)
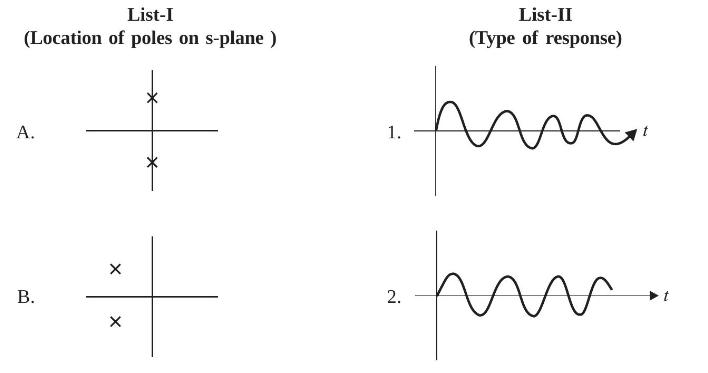
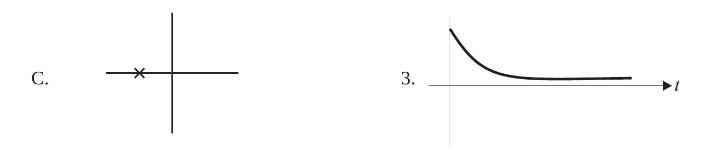
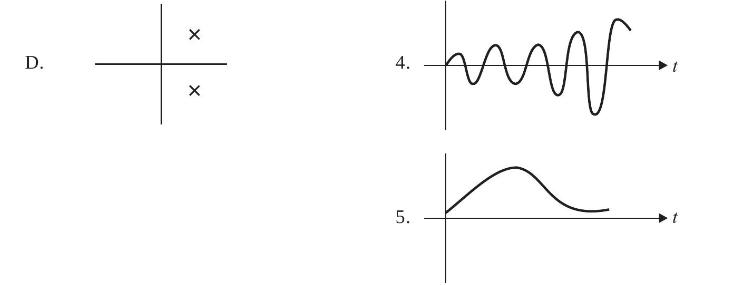
Match List-I with List-II and select the correct answer using the codes given below the lists: List-I (Location of poles on s-plane) A. B. # X X List-II (Type of response) fum 1. pama 2.
For a unit step input, a system with forward path transfer function \(G(s)=\frac{20}{s^{2}}\) and feedback path transfer function \(\mathrm{H}(s)=(s+5)\), has a steady state output of:(a) 20(b) 5(c) 0.2(d) zero
A linear second-order system with transfer function:\[G(s)=\frac{49}{s^{2}+16 s+49}\]is initially at rest and is subjected to a step input signal. The response of the system will exhibit a peak overshoot of:(a) \(16 \%\)(b) \(9 \%\)(c) \(2 \%\)(d) zero
The unit impulse response of a linear time-invariant second order system is; \(g(t)=10 e^{-8 t} \sin\) \(6 t(t
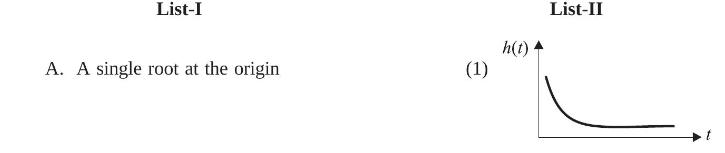
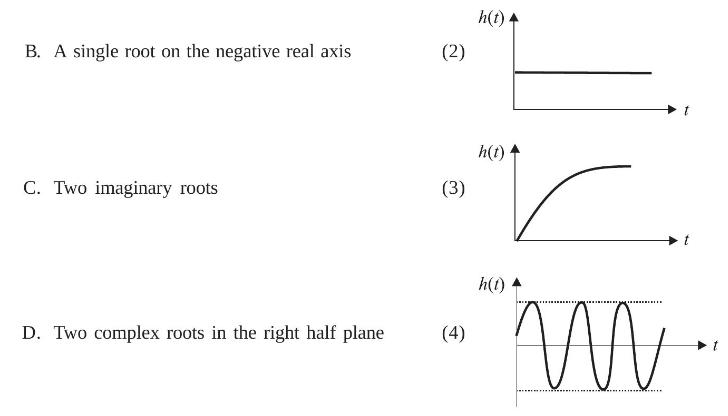
Match List-I (Roots in the 's' plane) with List-II (Impulse response) and select the correct answer: List-I A. A single root at the origin (1) h(t) List-II
\([-a \pm j b]\) are the complex conjugate roots of the characteristic equation of a second order system. Its damping coefficient and natural frequency will be respectively:(a) \(\frac{b}{\sqrt{a^{2}+b^{2}}}\) and \(\sqrt{a^{2}+b^{2}}\)(b) \(\frac{a}{\sqrt{a^{2}+b^{2}}}\) and \(a^{2}+b^{2}\)(c)
For a second order system, if both the roots equal then the value of damping ratio will be:(a) less then unity(b) equal to zero(c) equal to unity(d) greater than unity
A series circuit containing R, \(L\) and \(C\) is excited by a step voltage input. The voltage across the capacitance exhibits oscillations. The damping coefficient (ratio) of this circuit is given by:(a) \(\zeta=\frac{\mathrm{R}}{2 \sqrt{\mathrm{LC}}}\)(b)
If a system is represented by the differential equation ;\[\frac{d^{2} y}{d t^{2}}+\frac{6 d y}{d t}+9 y=0\]then the solution \(\mathrm{y}\) will be of the form:(a) \(k_{1} e^{-t}+k_{2} e^{-9 t}\)(b) \(\left(k_{1}+k_{2} tight) e^{-3 t}\)(c) \(k e^{-3 t} \sin (t+\phi)\)(d) \(\left(k_{1}+k_{2} tight)
The transfer function of a control system is given as ; \(T(s)=\frac{K}{s^{2}+4 s+K}\). For this system to be critically damped, the value of \(\mathrm{K}\) should be:(a) 1(b) 2(c) 3(d) 4
If the time response of a system is given by the following equation;\[y(t)=5+3 \sin \left(\omega t+\delta_{1}ight)+e^{-3 t} \sin \left(\omega t+\delta_{2}ight)+e^{-5 t}\]Then the steady state part of the above response is given by:(a) \(5+3 \sin \left(\omega t+\delta_{1}ight)\)(b) \(5+3 \sin
The transfer function of a system is \(\frac{10}{1+s}\). When operated as a unity feedback system, the steady state error to a unit step input will be:(a) zero(b) \(1 / 11\)(c) 10(d) infinity
A unity feedback second order control system is characterised by \(\mathrm{G}(s)=\frac{\mathrm{K}}{s(\mathrm{~J} s+\mathrm{B})}\)where \(\mathrm{J}=\) moment of inertia, \(\mathrm{K}=\) system gain, \(\mathrm{B}=\) Viscous damping coefficient. The transient response specification which is NOT
The open loop transfer function of a unity feedback system is given by \(\frac{\mathrm{K}}{s(s+1)}\). If the value of gain \(\mathrm{K}\) is such that the system is critically damped, the closed loop poles of the system will lie at:(a) -0.5 and -0.5(b) \(\pm j 0.5\)(c) 0 and -1(d) \(0.5 \pm j 0.5\)
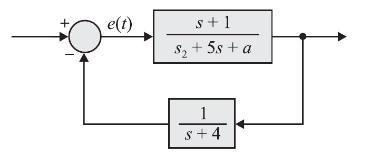
For what values of ' \(a\) ' does the system shown in figure has a zero steady state error [i.e., \(\operatorname{Lim}_{t ightarrow \infty} e(t)\) ] for a step input:(a) \(a=0\)(b) \(a=1\)(c) \(a(d) For no value of \(a\) e(t) s+1 S + 5s + a 1 S+4
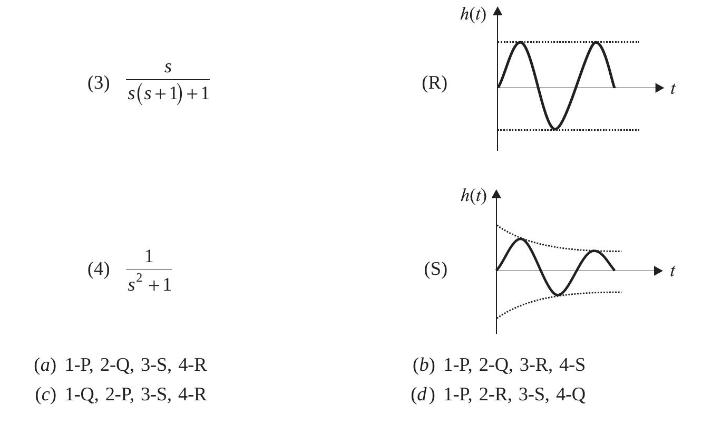
Match the following transfer functions and impulse responses and choose the correct answer: (1) (2) Transfer function S S+1 S (s+1) (P) (Q) h(t) h(t) Impulse responses
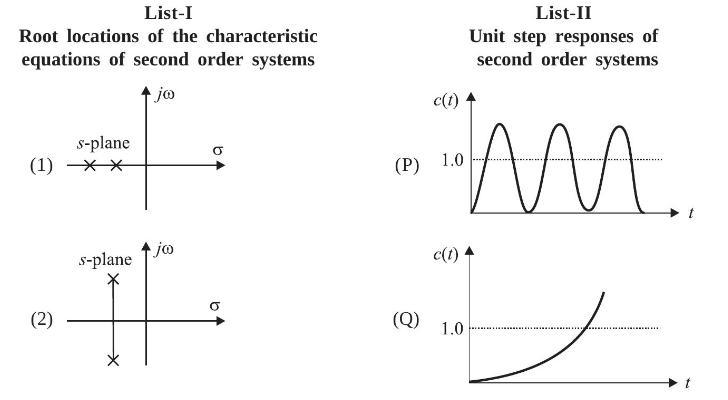
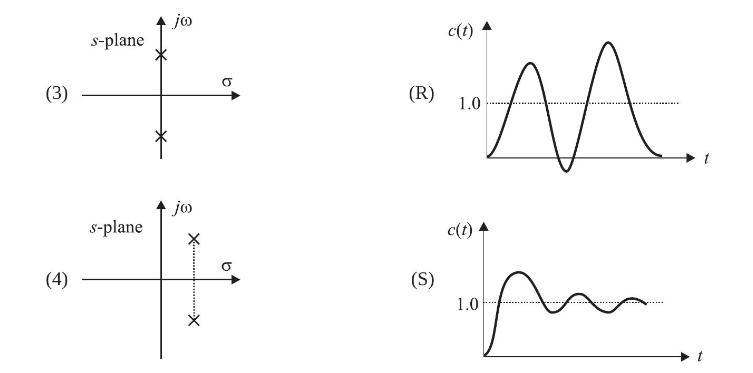
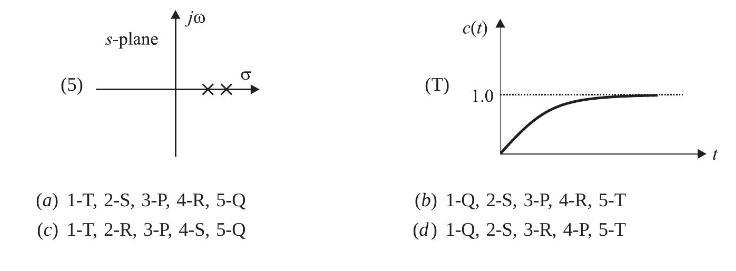
Match the following items from List-I and List-II and choose the correct answer: List-I Root locations of the characteristic equations of second order systems jo s-plane (1) X (2) s-plane X jo (P) 1.0 (Q) c(t) 1.0 List-II Unit step responses of second order systems M 2 www**** t
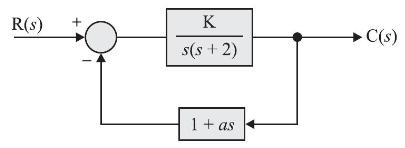
For the system shown in figure with a damping ratio \(\zeta\) of 0.7 and an undamped natural frequency \(\omega_{n}\) of \(4 \mathrm{rad} / \mathrm{sec}\), the values of \(\mathrm{K}\) and \(a\) are:(a) \(\mathrm{K}=4, \quad a=0.35\)(b) \(\mathrm{K}=8, \quad a=0.455\)(c) \(\mathrm{K}=16,
Consider the following expressions which indicate the step or impulse response of an initially relaxed control system:1. \(\left(5-4 e^{-2 t}ight) u(t)\)2. \(\left(e^{-2 t}+5ight) u(t)\)3. \(\delta(t)+8 e^{-2 t} u(t)\)4. \(\delta(t)+4 e^{-2 t} u(t)\)Those which correspond to the step and impulse
Consider the systems with the following open loop transfer functions:1. \(\frac{36}{s(s+3.6)}\)2. \(\frac{100}{s(s+5)}\)3. \(\frac{6.25}{s(s+4)}\)The correct sequence of these systems in increasing order of the time taken for the unit step response to settle is:(a) \(1,2,3\)(b) 3, 1, 2(c) 2, 3,
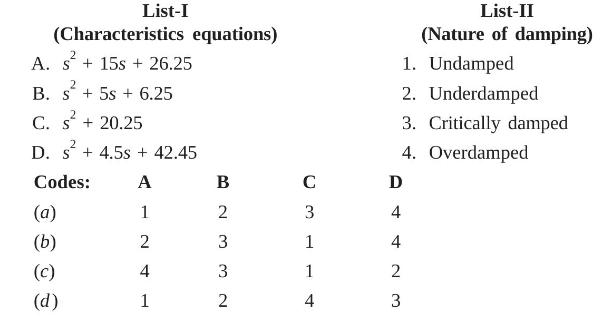
Match List-I with List-II and select the correct answer using the codes given below the lists: List-I (Characteristics equations) A. s + 15s + 26.25 2 B. s + 5s + 6.25 2 C. s+ 20.25 D. s + 4.5s + 42.45 Codes: A 1 2 (a) (b) (c) (d) 4 1 B 2 3 3. 2 C 3 1 1 4 List-II (Nature of damping) 1. Undamped 2.
A step function voltage is applied to an RLC series circuit having R \(=2 \Omega, \mathrm{L}=1 \mathrm{H}\) and \(\mathrm{C}=1 \mathrm{~F}\). The transient current response of the circuit would be:(a) overdamped(b) critically damped(c) underdamped(d) over, under or critically damped depending upon
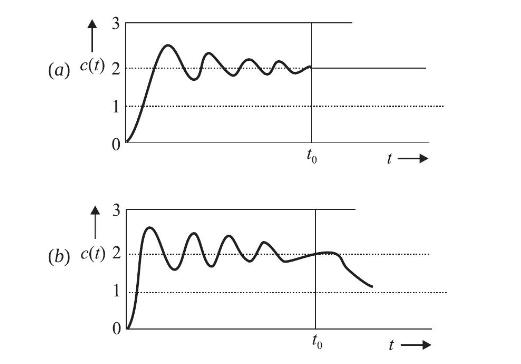
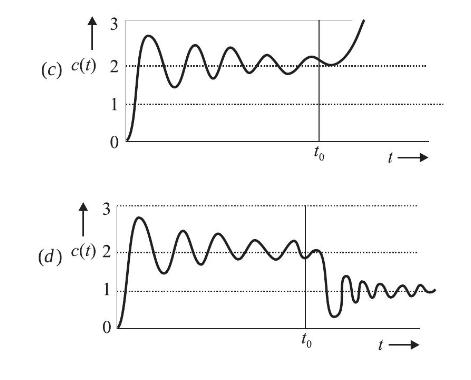
A second order under damped system exhibited a \(15 \%\) maximum overshoot on being excited by a step input \(r(t)=2 u(t)\), and then attained a steady state value of 2 (see figures given). If, at \(t=t_{0}\), the input were changed to a unit step \(r(t)=u(t)\), then its time response \(c(t)\)
If the closed loop transfer function \(\mathrm{T}(s)\) of a unity negative feedback system is given by;\[\mathrm{T}(s)=\frac{a_{n-1} s+a_{n}}{s^{n}+a_{1} s^{n-1}+\ldots \ldots . .+a_{n-1} s+a_{n}}\]then the steady state error for a unit ramp input is:(a) \(\frac{a_{n}}{a_{n-1}}\)(b)
A unity feedback control system has a forward path transfer function; \(\mathrm{G}(s)=\frac{10(1+4 s)}{s^{2}(1+s)}\), the system is subjected to an input \(r(t)=1+t+\frac{t^{2}}{2}(t \geq 0)\), the steady state error of the system will be:(a) zero(b) 10(c) 0.1(d) infinity
The system shown in figure below is excited by unit step input and is required to exhibit output equal to input in steady state. The design effort is made to ensure that peak over shoot and \(2 \%\) settling time do not exceed \(5 \%\) and 1 second respectively. For successful design the numerical
A continuous system has transfer function with a zero at \(s=-1\), a pole at \(s=-2\) and gain factor \(=2\). The unit step response generated by this system is(a) \(1+e^{-t}\)(b) \(1-e^{-2 t}\)(c) \(1-e^{-t}\)(d) \(1+e^{-2 t}\)
The unit ramp response of a system having transfer function \(\mathrm{G}(s)=\frac{s+1}{s+2}\), is(a) \(\frac{1}{2}\left(1-e^{-2 t}ight)-t\)(b) \(\frac{1}{4}+\frac{1}{4} e^{-2 t}-\frac{1}{2} t\)(c) \(\frac{1}{4}\left(1-e^{-2 t}ight)+t\)(d) \(\frac{1}{4}-\frac{1}{4} e^{-2 t}+\frac{1}{2} t\)
If two identical first order stable low pass filters are cascaded non-interactively, then the unit step response of the composite filter will be(a) critically damped(b) overdamped(c) underdamped(d) oscillatory
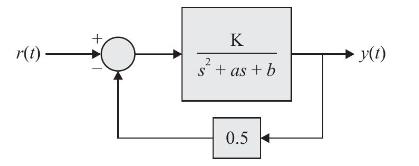
Consider the system shown in figure below. The value of \(K\) that contributes steady state error of \(20 \%\) to a unit step input, is(a) 2(b) 100(c) 20(d) 4 R(S) K s+1 K 4s + 1 Y(s)
When a unit step input is applied, a second order underdamped system exhibits a peak over shoot of \(\mathrm{M}_{p}\) at \(t=t_{p}\). If another step input equal in magnitude to peak overshoot \(\mathrm{M}_{p}\) is applied at \(t=t_{p}\), then the system will settle at(a) \(1+\mathrm{M}_{p}\)(b)
A third order system is approximated to an equivalent second order system. The rise time of the lower order system will be(a) same as that of original system for any input.(b) smaller than that of original system for any input.(c) larger than that of original system for any input.(d) larger or
A second order system has poles at \(s=-1 \pm j\). The step response of this system will exhibit peak value at(a) \(4.5 \mathrm{sec}\)(b) \(3.5 \mathrm{sec}\)(c) \(3.14 \mathrm{sec}\)(d) 1 sec.
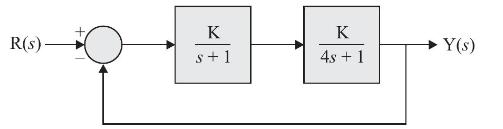
A closed loop control system shown in figure below, is excited by a unit step function. The error it exhibits in steady state, is(a) -1.0(b) -0.5(c) 0.5(d) 0 R(s) 3/s + 2 s +2 Y(s)
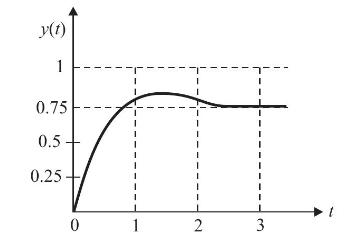
The unit step response of a unity feedback system with open loop transfer function \(G(s)=\frac{K}{(s+1)(s+2)}\) is shown in the figure below. The value of \(K\), is(a) 0.5(b) 2(c) 4(d) 6 y(1) 1 0.75 0.5- 0.25- 0 1 I 1 2 3
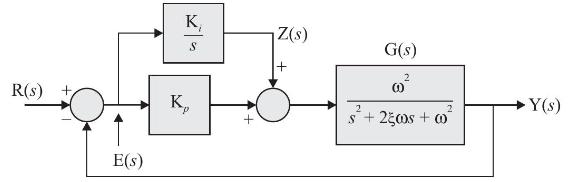
The system shown in the figure below is excited by unit step input. The system is stable and \(K_{p}=4, K_{i}=10, \omega=500, \xi=0.7\). The steady state value of \(z(t)\), is(a) 1(b) 0.25(c) 0.1(d) 0 R(S) + E(S) K S K Z(s) + G(s) 2 (0) 2 s + 2500s +00 Y(s)
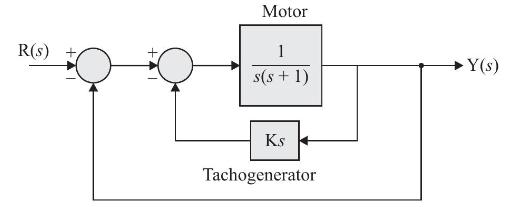
A two loop position control system is shown below.The gain \(\mathrm{K}\) of tachogenerator influences mainly the(a) peak overshoot.(b) natural frequency of oscillation.(c) phase shift of closed loop transfer function at very low frequencies \((\omega ightarrow 0)\).(d) phase shift of closed loop
Showing 400 - 500
of 480
1
2
3
4
5
Step by Step Answers