New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
Computer science
systems analysis and design
control system analysis and design
Control System Analysis And Design 2nd Edition A.K. Tripathi - Solutions
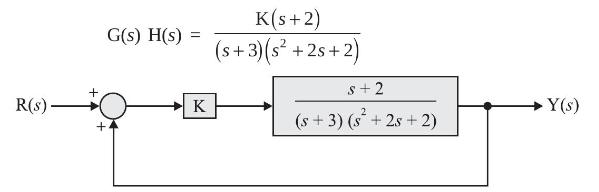
Consider the system with positive feedback as shown in Fig. P5.10(a). Sketch the root locus for \(\mathrm{K}\) varying from 0 to \(\infty\) and comment on stability. Show salient points on root locus. R(s). + G(s)H(s) + = K K(s+2) (s+3)(s+2s+2) S+2 (s + 3) (s +28+2) Y(s)
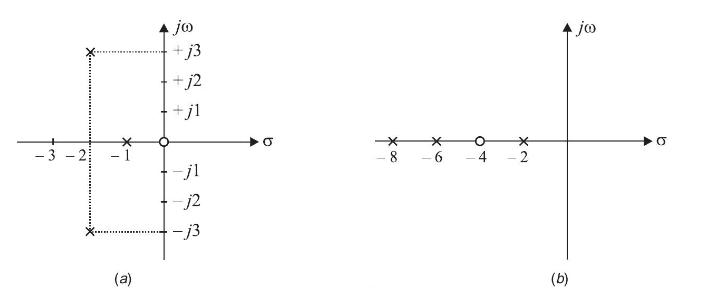
Sketch root locus for the systems with pole-zero configuration shown in Fig. D5.1(a) and (b). Find asymptotic angles, centroid, approximate break away/entry points, angles of departure and angles of arrival where applicable. -3-2 - 1 (a) jo +j3 -j2 +jl jl -j2 -j3 b 8 -6 04 N (b) jo b
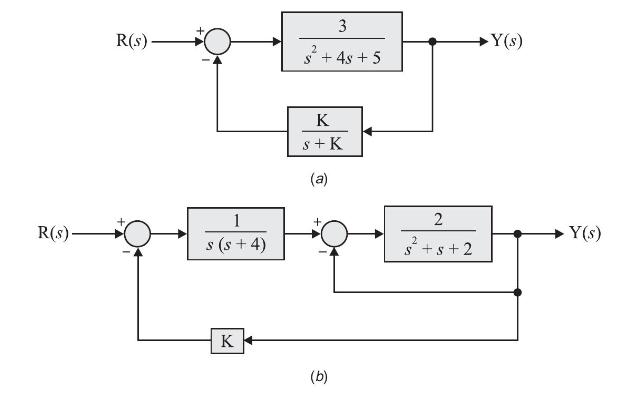
Develop root locus plots for the systems shown in Fig. D5.2 (a) and (b) for K ranging from 0 to \(\infty\). Find asymptotic angles, centroid, approximate break away/entry points, angles of departure and angles of arrival where applicable. R(s) R(s) 1 s(s+ 4) K 3 2 S + 4s +5 K s+ K (a) + (b) 2 2
Sketch the root locus for KK ranging from 0 to −∞−∞ for a system with productG(s)H(s)=K(s−4)2(s+5)(s2+4s+10)G(s)H(s)=K(s−4)2(s+5)(s2+4s+10)and show the salient points thereon.
Sketch the root locus for the system with \(\mathrm{G}(\mathrm{s}) \mathrm{H}(\mathrm{s})\) product given as\[G(s) H(s)=\frac{K}{s^{4}-16}\]
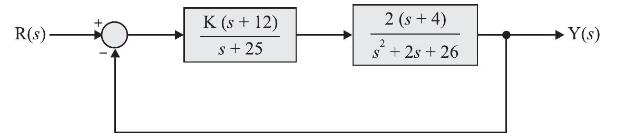
The pitch control system of an aircraft is shown in Fig. D5.5. Sketch the root locus for K ranging from 0 to \(\infty\). Determine the value of \(\mathrm{K}\) so that damping ratio of dominant poles is 0.6 . What is location of corresponding poles. R(s). K (s + 12) s +25 2 (s + 4) 2 S +2s +26 Y(s)
A feedback system is modelled by the product\[\mathrm{G}(s) \mathrm{H}(s)=\frac{10(s+0.7)}{s(s+p)(s+4)}\]Sketch the root locus as \(p\) varies from 0 to \(\infty\). Determine location of closed-loop poles for \(p=2\).
Sketch the root locus for open-loop transfer function\[\mathrm{G}(\mathrm{s}) \mathrm{H}(\mathrm{s})=\frac{\mathrm{K}\left(s^{2}+4ight)}{s(s+2)}\]Calculate the value of \(\mathrm{K}\) at(a) Break away point(b) \(s=-0.7 \pm j 0.9\).
The characteristic equation for a control system is given by:\[(s+2)(s+4)(s+\alpha)+K=0\]To achieve a good dynamic behaviour, it is desired that damping ratio \(\xi=0.5\) and that the natural frequency \(\omega_{n}=4 \mathrm{rad} / \mathrm{sec}\), determine \(\alpha\) and \(\mathrm{K}\).
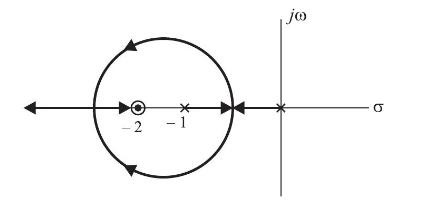
The root locus of unity feedback system is shown below. The open-loop transfer function is given by(a) \(\frac{\mathrm{K}}{s(s+1)(s+2)}\)(b) \(\frac{\mathrm{K}(s+1)}{s(s+2)}\)(c) \(\frac{\mathrm{K}(s+2)}{s(s+1)}\)(d) \(\frac{\mathrm{K} s}{(s+1)(s+2)}\) -2 * 1 jo
The characteristic equation of a unity feedback control system is given by\[s^{3}+\mathrm{K}_{1} s^{2}+s+\mathrm{K}_{2}=0\]Consider the following statements in this regard.1. For a given value of \(K_{1}\), all the root locus branches will terminate at infinity for variable \(K_{2}\) in the
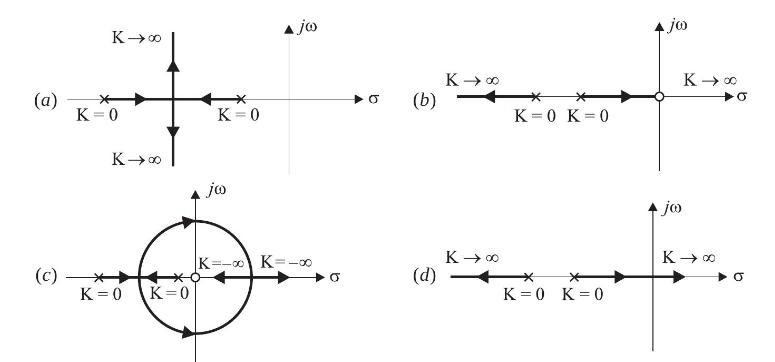
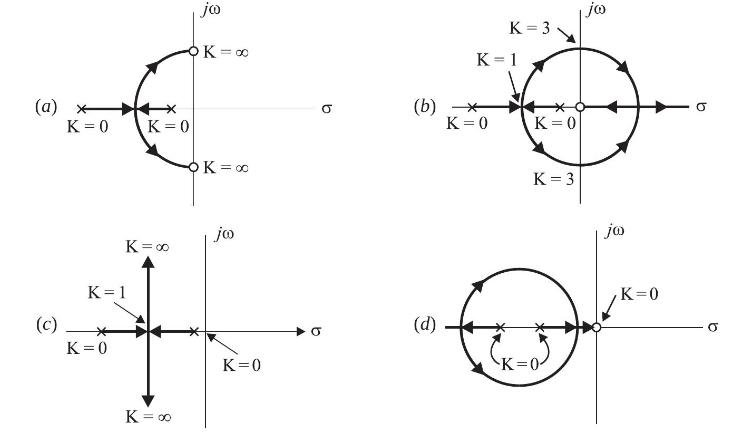
The closed-loop transfer function of a feedback control system is given byC(s)R(s)=Kss2+(3+K)s+2C(s)R(s)=Kss2+(3+K)s+2Which one of the following diagrams represents the root locus diagram of the system for K>0K>0 ? (a) (c) K K=0 K K = 0 K=0 K = 0 jo A jo K=-00 K=-00 ( O (b) (d) K K K=0 K=0
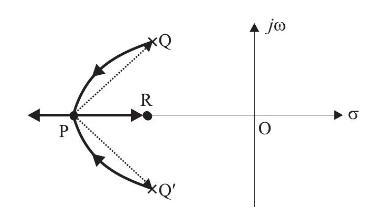
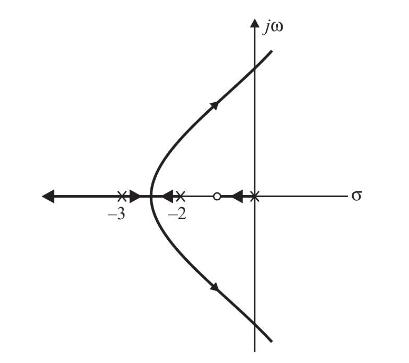
The figure shown below is the root locus of open-loop transfer function of a control system where\(\times\) represents pole- represents zero\(\mathrm{O}\) - Origin\(\mathrm{PQ}=2.6=\mathrm{PQ}^{\prime}\)\(\mathrm{PR}=1.4\)\(\mathrm{OR}=2.0\)\(\mathrm{OQ}=1.4=\mathrm{OQ}^{\prime}\)The value of the
Given a unity feedback system with open-loop transfer function:\[\mathrm{G}(s)=\frac{\mathrm{K}(s+2)}{(s+1)^{2}}\]The correct root locus plot of the system is (a) O -2 jo O O (b) IN 2 1 jo O b
The loop transfer function GH of a control system is given by\[\mathrm{GH}=\frac{\mathrm{K}}{s(s+1)(s+2)(s+3)}\]Which of the following statements regarding the conditions of the system root loci diagram is/are correct?1. There will be four asymptotes2. There will be three separate root loci3.
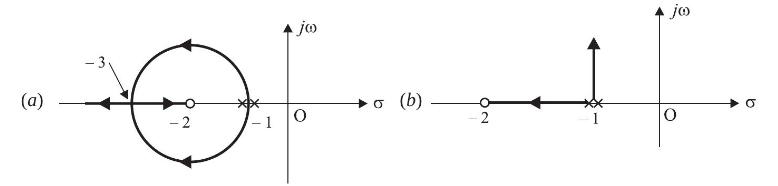
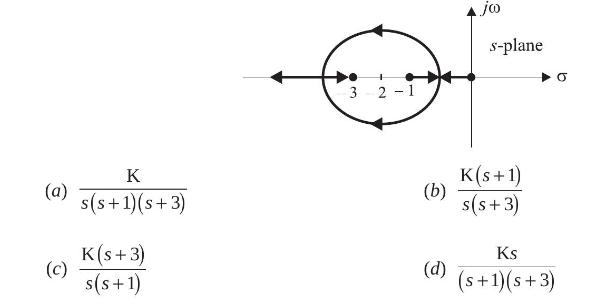
The root locus of a unity feedback system is shown in the figure below. The open-loop transfer function of the system is (a) (c) K s(s+1)(s+3) K(s+3) s(s+1) + 3-2-1 (b) (d) jo s-plane K(s+1) s(s+3) O Ks (s+1)(s+3)
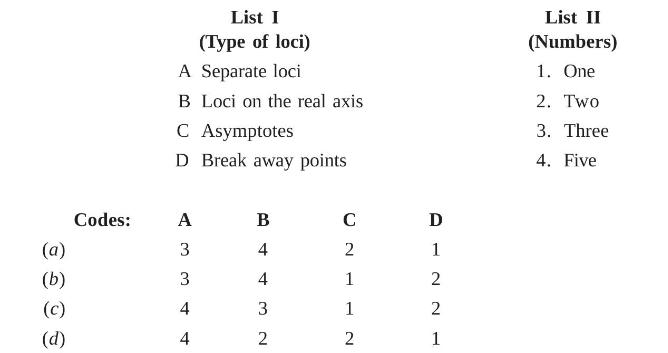
Match List-I with List-II in respect of the open-loop transfer function; \(G(s) H(s)=\) \(\frac{\mathrm{K}(s+10)\left(s^{2}+20 s+500ight)}{s(s+20)(s+50)\left(s^{2}+4 s+5ight)}\) and select the correct answer. (a) (b) (c) (d) List I (Type of loci) A Separate loci B Loci on the real axis C Asymptotes
Which of the following effects are correct in respect of addition of a pole to the system loop transfer function?1. The root locus is pulled to the right.2. The system response becomes slower3. The steady state error increasesOf these statements:(a) 1 and 2 are correct(b) 1, 2 and 3 are correct(c)
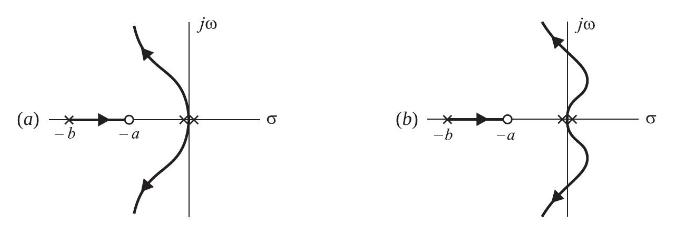
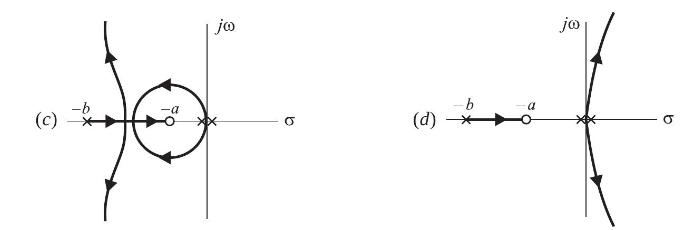
A unity feedback system has an open-loop transfer function of the form\[\mathrm{KG}(s)=\frac{\mathrm{K}(s+a)}{s^{2}(s+b)} ; \quad b>a\]Which of the loci shown below can be valid root loci for the system? (a) -b a jo (b) -b -a joo
The transfer function of a closed-loop system is\[\mathrm{T}(s)=\frac{\mathrm{K}}{s^{2}+(3-\mathrm{K}) s+1}\]where \(\mathrm{K}\) is the forward path gain. The root locus plot of the system is (a) x (c) K = 0 K= 1 K = 0 K = 14 K = 0 K = 0 jo OK= OK = 00 jo K=0 15 b (b) (d) K = 3 K = 1 K = 0 K = 0
The characteristic equation of a feedback control system is given by\[s^{3}+5 s^{2}+(\mathrm{K}+6) s+\mathrm{K}=0\]where \(\mathrm{K}>0\) is a scalar variable parameter. In the rootloci diagram of the system the asymptotes of the root locus for large values of \(\mathrm{K}\) meet at a point in the
If the open-loop transfer function is a ratio of a numerator polynomial of a degree ' \(m\) ' and a denominator polynomial of a degree ' \(n\) ', then the integer \((n-m)\) represents the number of:(a) break away points(b) unstable poles(c) separate root loci(d) asymptotes.
Consider the points \(s_{1}=-3+j 4\) and \(s_{2}=-3-j 2\) in the \(s\)-plane. Then, for a system with the open-loop transfer function:\[\mathrm{G}(s) \mathrm{H}(s)=\frac{\mathrm{K}}{(s+1)^{4}}\](a) \(s_{1}\) is on the root locus, but not \(s_{2}\)(b) \(s_{2}\) is on the root locus, but not
The root locus diagram for a closed-loop feedback system is shown below. The system is overdamped:(a) only if \(0 \leq \mathrm{K} \leq 1\)(b) only if \(1(c) only if \(\mathrm{K}>5\)(d) only if \(0 \leq \mathrm{K}5\). K = 5 0 - K K= K = 0 ** 2 K = 0 1 K = 1 jo O
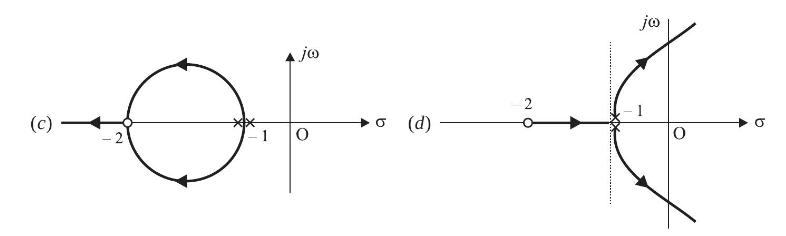
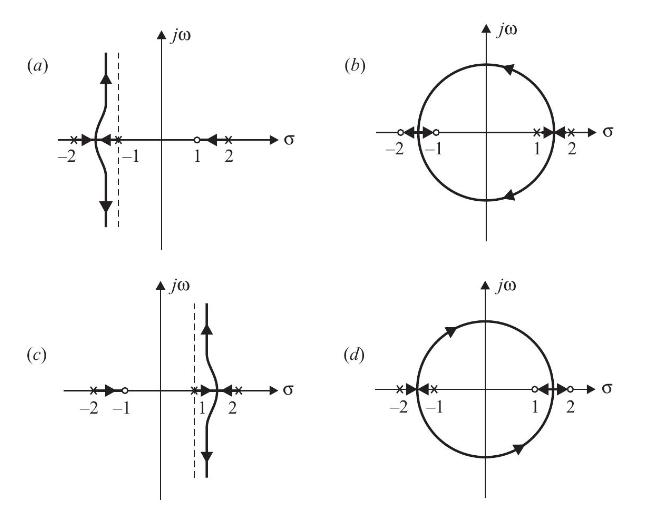
A closed loop system is described by characteristic equation\[\left(s^{2}-4ight)(s+1)+K(s-1)=0\]The root locus with \(\mathrm{K}\) varying from 0 to \(\infty\), is (a) (c) -2 -2 -1 jo joo 1 2 1 1 1 12 10 a (b) (d) -2 -2 jo jo 0 1 2 2 1
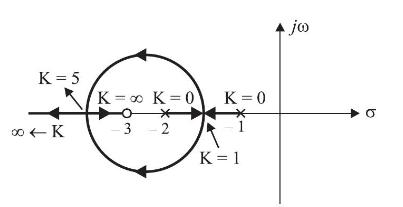
The characteristic equation of a closed loop system is \(s(s+1)(s+3)+K(s+2)=0\); \(\mathrm{K}>0\). Which of the following statements is true?(a) The roots are always real.(b) The break away point can not lie in the range \(-1
The root locus of a system is shown in figure below. The corresponding open loop transfer function is(a) \(\frac{\mathrm{K} \mathrm{s}(s+1)}{(s+2)(s+3)}\)(b) \(\frac{\mathrm{K}(s+1)}{s(s+2)(s+3)^{2}}\)(c) \(\frac{\mathrm{K}}{s(s-1)(s+2)(s+3)}\)(d)
Use Nyquist stability criterion to investigate range of gain \(\mathrm{K}\) for stability of the system shown in Fig. P6.1. X(s) KS+ 201 1 s(s+1) Y(s)
Sketch the complete Nyquist plot and interpret stability therefrom for the systems with following loop transmittances.(a) \(\mathrm{G}_{1}(s)=\frac{4 s+1}{s^{2}(s+1)(2 s+1)}\)(b) \(\mathrm{G}_{2}(s)=\frac{1}{s^{4}(s+\alpha)}\)
Use Nyquist stability criterion to investigate range of \(\mathrm{K}\) for closed loop stability for unity feedback systems with following loop transmittances.(a) \(\mathrm{G}_{1}(s)=\frac{\mathrm{K}(s+1)}{\left(s+\frac{1}{2}ight)(s-2)} ; \mathrm{K}>0\)(b)
Sketch Nyquist plot for each of the following GH functions. Determine whether or not each system is stable using Nyquist plot.(a) \(G_{1}(s) H_{1}(s)=\frac{\left(s^{2}+5ight)}{s^{2}\left(s^{2}+4 s+8ight)}\)(b) \(\mathrm{G}_{2}(s) \mathrm{H}_{2}(s)=\frac{1}{(s+2)\left(s^{2}+4ight)}\)
Use Nyquist criterion to determine range of \(\mathrm{K}\) for closed loop stability of the open loop function with unity feedback given by:\[\mathrm{G}(s)=\frac{\mathrm{K} e^{-0.8 s}}{(s+1)}\]
Sketch Nyquist plot for unity feedback system with loop transmittance\[\mathrm{G}(s)=\frac{\mathrm{K}(s+10)^{2}}{s^{3}} ; \mathrm{K}>0\]and investigate range of gain \(\mathrm{K}\) for stability.
Draw a Nyquist plot for a system with open loop transmittance\[\mathrm{G}(s) \mathrm{H}(s)=\frac{s^{2}+4 s+6}{s^{2}+5 s+4}\]
Sketch Bode plot for a feedback system with loop transmittance\[\mathrm{G}(s) \mathrm{H}(s)=\frac{100(s+4)}{s(s+0.5)(s+10)}\]and find (a) GM (b) PM (c) gain cross over frequency ( \(d\) ) phase cross over frequency. Comment on closed loop stability.
Sketch Bode plot for unity feedback system with loop function\[G(s)=\frac{10(s+1)(s+70)}{s^{2}\left(s^{2}+18 s+400ight)}\]and interpret closed loop stability.
The loop transmittance of unity feedback system is\[\mathrm{G}(s)=\frac{\mathrm{K}}{s(1+s)(1+0.1 s)(1+0.01 s)}\](a) Sketch asymptotic \(\mathrm{dB}\) plot and phase plot for \(\mathrm{K}=1\) to find gain cross over frequency, phase cross over frequency, GM, PM and whether closed loop system is
The open loop transfer function of a unity feedback system is \(\mathrm{G}(s)=\frac{\mathrm{K}}{s(1+0.1 s)}\). If the steady state error of the system is specified to be limited to \(1 \%\) on unit ramp excitation, determine the values of gain margin (GM), phase margin (PM), gain cross over
A feedback system has loop function \(\mathrm{G}(s) \mathrm{H}(s)=\frac{\mathrm{K}}{s(1+0.5 s)(1+s)}\), determine analytically(a) the value of \(K\) so that system exhibits GM of \(+6 \mathrm{~dB}\).(b) The value of \(\mathrm{K}\) so that system exhibits PM of \(+30^{\circ}\).
Sketch the Bode plots for following loop function and find the loop gain \(\mathrm{K}\) for gain cross over frequency \(\omega_{g c}\) to be \(3 \mathrm{rad} / \mathrm{sec}\).\[\mathrm{G}(s)=\frac{\mathrm{K} e^{-0.1 s}}{s(1+s)(1+0.1 s)}\]
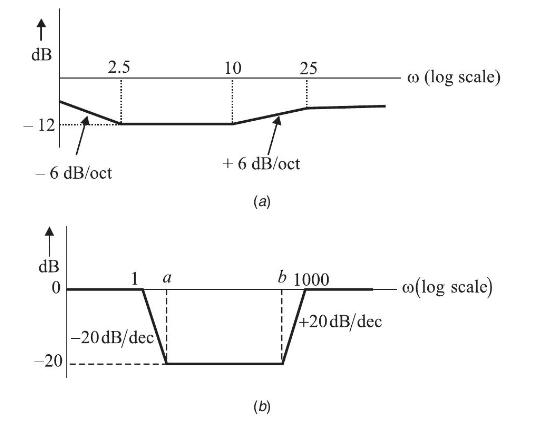
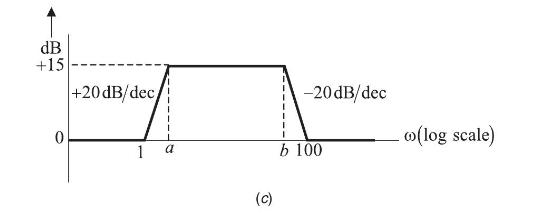
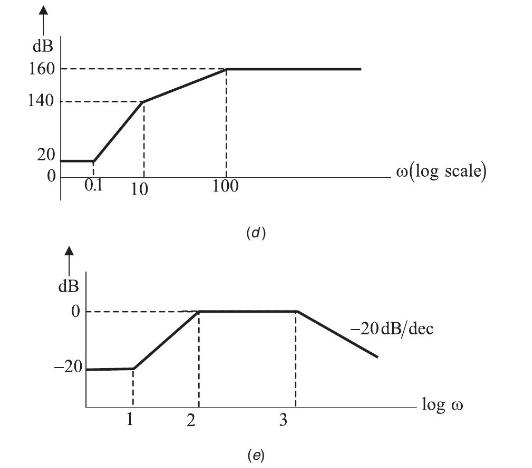
Determine the transfer function model of systems with asymptotic \(d B\) plots shown in Fig. P6.15(a), (b), (c), (d) and (e). Assume minimum phase characteristics possessed by each system. dB - 12 6 dB/oct dB 0 2.5 -20 1 -20 dB/dec 10 +6 dB/oct (a) 25 (b) b 1000 +20dB/dec @ (log scale) co(log scale)
Sketch frequency response curves (both \(\mathrm{dB}\) plot and phase plot) for the transmittance\[G(s)=\frac{s^{2}+2 s+100}{s^{2}+10 s+100}\]
Draw Bode plot for the system with following loop transfer functions:(a) \(\mathrm{G}_{1}(s) \mathrm{H}_{1}(s)=\frac{3(s+1)(s+6)}{s^{2}\left(s^{2}+18 s+400ight)}\)(b) \(\mathrm{G}_{2}(s) \mathrm{H}_{2}(s)=\frac{20(s+1)}{s(s+5)\left(s^{2}+2 s+100ight)}\)and determine each of the following therefrom
Draw Bode diagram for unity feedback system\[\mathrm{G}(s)=\frac{\mathrm{K}}{s(s+2)(s+10)}\]Read as best you can, the value of \(\omega_{p c}\). For what value of \(\mathrm{K}\) will \(\omega_{p c}\) be equal to \(\omega_{g c}\). Comment on stability for this value of \(\mathrm{K}\).
The open loop transfer function of a closed loop system is\[\mathrm{G}(s) \mathrm{H}(s)=\frac{\mathrm{K}}{s(s+1)(2 s+1)}\]Determine phase cross over frequency \(\omega_{p c}\) and gain margin in terms of \(\mathrm{K}\). Is the closed loop system stable for \(\mathrm{K}=2\) ? What is critical value
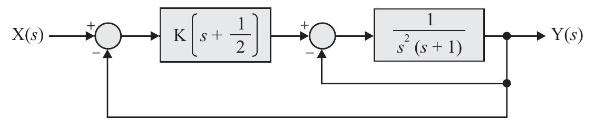
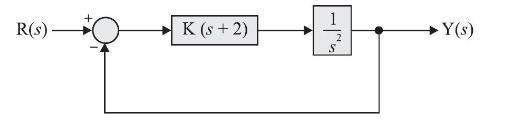
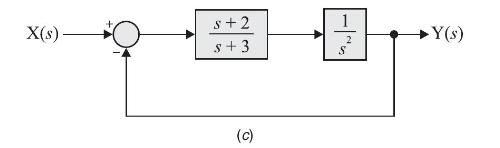
A space vehicle control system is shown in Fig. D6.5. Determine gain KK so that system exhibits phase margin of 60∘60∘. What is gain margin for this value of KK ? R(s) K (s + 2) 1 2 S Y(s)
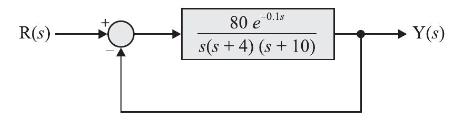
A chemical reactor system is depicted in Fig. D6.6. Sketch Bode diagram and determine therefrom as best read the following:(i) gain cross over frequency \(\left(\omega_{g c}ight)\)(ii) phase cross over frequency \(\left(\omega_{p c}ight)\)(iii) Gain margin (GM)(iv) Phase margin (PM)Is the system
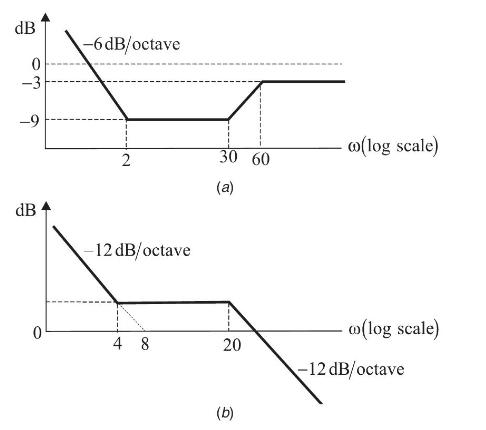
Find transfer function model for each of the following \(d B\) plots (assume minimum phase characteristics). dB 0 -3 -9 dB 0 -6 dB/octave 2 -12 dB/octave 48 30 60 (a) 20 (b) wo(log scale) (log scale) -12 dB/octave
Determine value of \(\alpha\) such that a closed loop system with loop transmittance\[G(s)=\frac{\left(1+\frac{s}{\alpha}ight)^{2}}{s^{3}}\]exhibits phase margin (PM) of \(30^{\circ}\).
Sketch Nyquist plot for each of the following loop transmittances and investigate range of \(\mathrm{K}\) for closed loop stability:(a) \(\mathrm{G}(s) \mathrm{H}(\mathrm{s})=\frac{\mathrm{K}(s+1)}{\mathrm{s}^{2}(s+2)(s+4)} ; \mathrm{K}>0\)(b) \(\mathrm{G}(s)
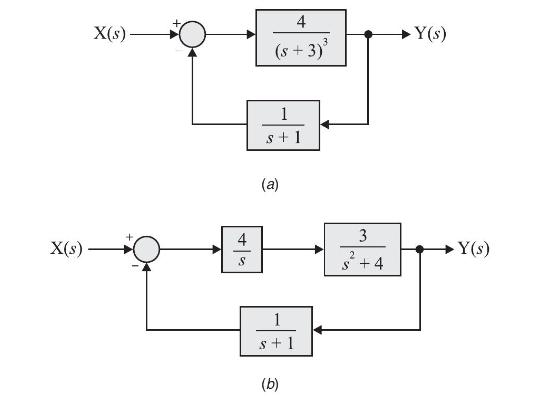
Sketch Nyquist plots for the following feedback systems and determine therefrom whether or not the system is stable. X(s) X(s). 4 S 4 (s + 3) 1 s + 1 (a) 1 s+1 (b) 3 2 S +4 Y(s) Y(s)
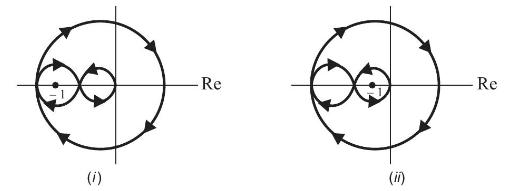
Consider Nyquist plots (i) and (ii) shown below. Assume loop transmittance having no RHP poles. Of the following the correct statement is(ii)(a) (i) and (ii) both are stable(b) (i) and (ii) both are unstable(c) (i) is stable but (ii) is unstable(d) (i) is unstable but (ii) is stable (1) Re Re
The amplitude ratio and phase shift function for a transmittance are\[A(\omega)=4 \quad \phi(\omega)=-3 \omega(\mathrm{rad})\]The forced sinusoidal response to the input signal \(r(t)=10 \cos \left(5 t-30^{\circ}ight)\) is(a) \(40 \cos \left(5 t-170^{\circ}ight)\)(b) \(30 \cos \left(5
The amplitude ratio \(A(\omega)\) and phase shift function \(\phi(\omega)\) for irrational transfer function \(\mathrm{G}(s)=\frac{e^{-4 s}}{s}\) respectively are(a) \(\mathrm{A}(\omega)=-4 \omega, \phi(\omega)=-\pi / 2\)(b) \(\mathrm{A}(\omega)=1 / \omega, \phi(\omega)=-4 \omega-\pi / 2\)(c)
For \(G(s)=\sqrt{s}\) consider the following statements(i) \(|\mathrm{G}(j \omega)|=\sqrt{\omega}\)(ii) \(\square \mathrm{G}(j \omega)=45^{\circ}\).Select the correct answer(a) (i) and (ii) both are true(b) (i) is true and (ii) is false(c) (i) and (ii) both are false(d) (i) is false and (ii) is
The approximate GM and PM for unity feedback system with loop transmittance \(\frac{e^{-0.1 s}}{s}\) are respectively(a) \(24 \mathrm{~dB}, 84^{\circ}\)(b) \(\infty, \infty\)(c) \(0, \infty\)(d) \(\infty, 0\).
The Nyquist locus of a transfer function is given below:The locus is modified as shown below on addition of pole or poles to the original \(\mathrm{G}(\mathrm{s}) \mathrm{H}(\mathrm{s})\).Then, the modified transfer function of the modified locus is(a) \(\mathrm{G}(s)
Which one of the following statements is true for gain margin and phase margin of two closed loop systems having loop transfer functions \(\mathrm{G}(s) \mathrm{H}(\mathrm{s})\) and \(\exp (-s) \mathrm{G}(s) \mathrm{H}(\mathrm{s})\) ?(a) Both gain and phase margins of the two systems will be
The gain margin for feedback system with \(\mathrm{G}(\mathrm{s}) \mathrm{H}(\mathrm{s})=\frac{10^{7}(s+1)^{2}(s+100)^{2}}{(s+10)^{4}}\) is(a) \(10 \mathrm{~dB}\)(b) \(20 \mathrm{~dB}\)(c) \(30 \mathrm{~dB}\)(d) \(\infty\)
The open loop transfer function of a unity feedback control system is \(\frac{10}{(s+5)^{3}}\). The gain margin of the system will be(a) \(20 \mathrm{~dB}\)(b) \(40 \mathrm{~dB}\)(c) \(60 \mathrm{~dB}\)(d) \(80 \mathrm{~dB}\)
The Nyquist plot of the open loop transfer function of a feedback control system is shown in the figure below. If the open loop poles and zeros are all located in the left half of the \(s\) plane, then the number of closed loop poles in the right half of the \(s\) plane will be(a) zero(b) 1(c) 2(d)
A system with transfer function \(G(s)=\frac{s}{(1+s)}\) is subjected to a sinusoidal input \(r(t)=\sin \omega t\) in steady state, the phase angle of the output relative to the input at \(\omega=0\) and \(\omega=\infty\) will be respectively(a) \(0^{\circ}\) and \(-90^{\circ}\)(b) \(0^{\circ}\)
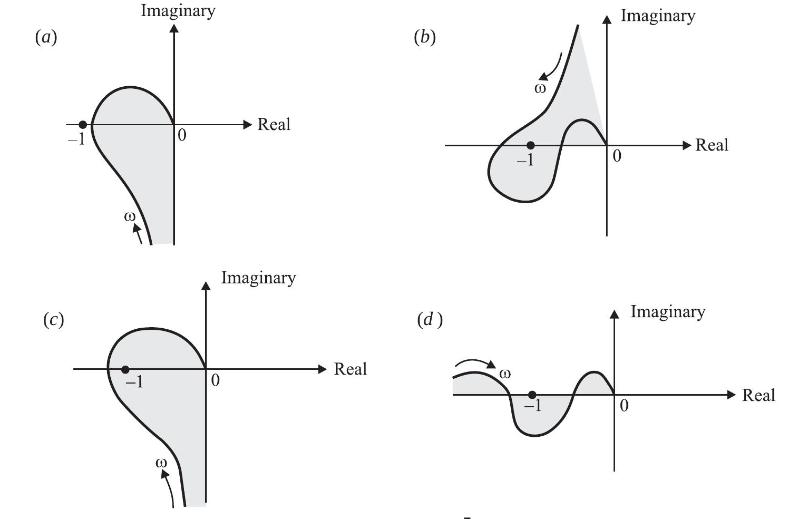
Consider the following Nyquist plots of different control systems. The plot of unstable system is: (a) (c) 8 Imaginary 0 Real Imaginary 0 Real (b) (d) Imaginary 0 0 Real Imaginary Real
The phase angle of the system \(G(s)=\frac{s+5}{s^{2}+4 s+9}\) varies between(a) \(0^{\circ}\) and \(90^{\circ}\)(b) \(0^{\circ}\) and \(-90^{\circ}\)(c) \(0^{\circ}\) and \(-180^{\circ}\)(d) \(-90^{\circ}\) and \(-180^{\circ}\)
The transfer function of a certain system is given by \(G(s)=\frac{s}{(1+s)}\). The Nyquist plot of the system is (a) Im (0 = (0=0 Re (b) Im 00=0 (0) = 0 Re
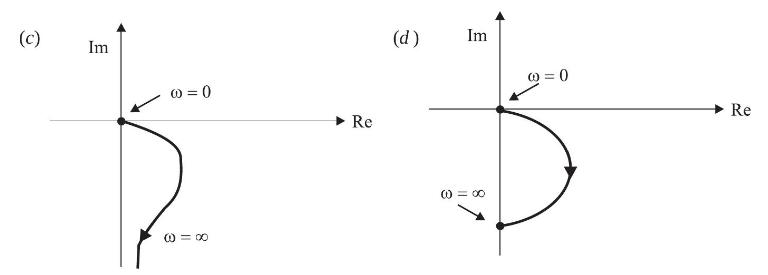
Choose the correct root loci of servo system whose Nyquist plot is shown below.(d) None of these. Increasing (0) Im Re
If the Nyquist plot cuts the negative real axis at a distance of 0.4, then the gain margin of the system is(a) 0.4(b) -0.4(c) 4(d) 2.5
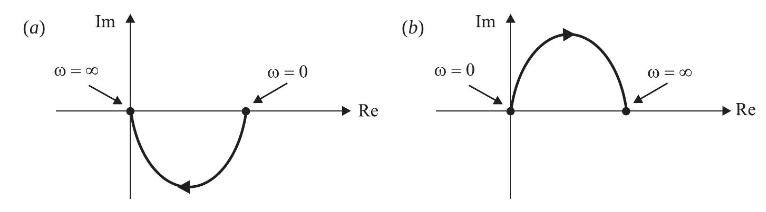
The Nyquist plot of \(G(s) H(s)=\frac{10}{s^{2}(1+0.5 s)(1+s)}\)(a) will start \((\omega=\infty)\) in the first quadrant and will terminate \((\omega=0)\) in the second quadrant(b) will start \((\omega=\infty)\) in the fourth quadrant and will terminate \((\omega=0)\) in the second quadrant(c) will
Consider the following statements associated with phase and gain margins.1. They are a measure of closeness of the polar plot to the \(-1+j 0\) point.2. For a non-minimum phase to be stable it must have positive phase and gain margins.3. For a minimum phase system to be stable, both the margins
For loop transmittance \(\mathrm{G}(s)=\frac{\omega_{n}{ }^{2}}{s^{2}+2 \xi \omega_{n} s+\omega_{n}{ }^{2}}\), the value of \(\left|\mathrm{G}\left(j \omega_{n}ight)ight|\) is(a) \(\frac{1}{2 \xi}\)(b) \(\frac{1}{4 \xi}\)(c) \(\frac{\xi}{2}\)(d) \(\frac{2}{\xi}\)
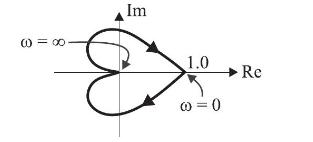
The Nyquist plot shown below, matches with the transfer function(a) \(\frac{1}{(s+1)^{3}}\)(b) \(\frac{1}{(s+1)^{2}}\)(c) \(\frac{1}{\left(s^{2}+2 s+2ight)}\)(d) \(\frac{1}{(s+1)}\) (0) = Im 1.0 00=0 Re
Which one of the following statements is correct in respect of the theory of stability?(a) phase margin is the phase angle lagging, in short of \(180^{\circ}\), at the frequency corresponding to a gain of 10.(b) gain margin is the value by which the gain falls short of unity, at a frequency
The Nyquist plot for a control system is shown below. The Bode plot for the same system will be (0=0 Im (10) = Re
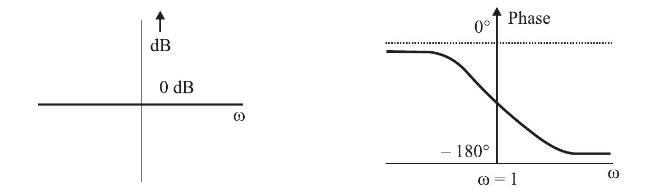
Which one of the following transfer functions represents the Bode plot shown below?(a) G \(=\frac{1-s}{1+s}\)(b) G \(=\frac{1}{(1+s)^{2}}\)(c) G \(=\frac{1}{s^{2}}\)(d) \(\mathrm{G}=\frac{1}{s(1+s)}\). 1 dB o dB 0 - 180 Phase 00= 1 ********** (0)
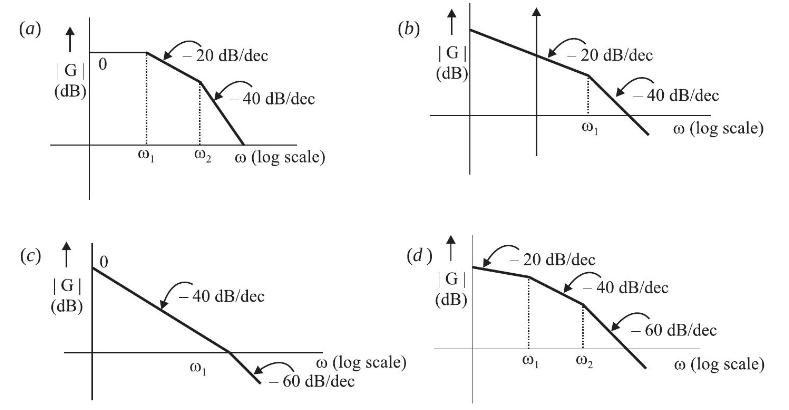
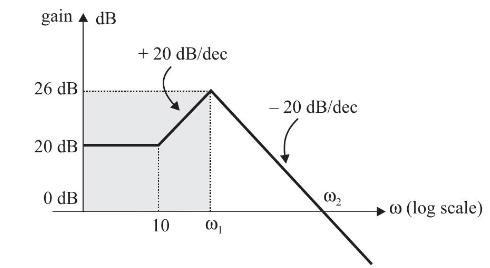
The magnitude frequency response of a control system is shown below. The value of \(\omega_{1}\) and \(\omega_{2}\) are respectively(a) 10 and 200(b) 20 and 200(c) 20 and 400(d) 100 and 400 gain dB 26 dB 20 dB 0 dB + 20 dB/dec 10 @0 - 20 dB/dec 00 @0 (log scale)
The Bode plot shown below has \(\mathrm{G}(j \omega)\) as(a) \(\frac{100}{j \omega(1+j 0.5 \omega)(1+j 0.1 \omega)}\)(b) \(\frac{100}{j \omega(2+j \omega)(10+j \omega)}\)(c) \(\frac{10}{j \omega(1+2 j \omega)(1+10 j \omega)}\)(d) \(\frac{10}{j \omega(1+0.5 j \omega)(1+0.1 j \omega)}\) gain dB 0 -
A system has fourteen poles and two zeros. The slope of its highest frequency asymptote in its magnitude plot is(a) - \(40 \mathrm{~dB} /\) decade(b) - \(240 \mathrm{~dB} /\) decade(c) \(-280 \mathrm{~dB} /\) decade(d) - \(320 \mathrm{~dB} /\) decade
Consider the following techniques.1. Bode plot2. Nyquist plot3. Nichol's chart4. Routh-Hurwitz criterionWhich of these techniques are used to determine relative stability of a closed loop linear system?(a) 1 and 2(b) 1 and 4(c) 1, 2 and 3(d ) 2, 3 and 4
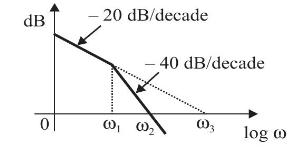
Consider the following statements regarding the frequency response of a system as shown.1. The type of the system is one2. \(\omega_{3}=\) static error coefficient \(\left(\mathrm{K}_{v}ight)\)3. \(\omega_{2}=\frac{\omega_{1}+\omega_{3}}{2}\)Select the correct answer using the codes given below.(a)
The forward path transfer function of a unity feedback system is given by \(\mathrm{G}(s)=\frac{1}{(1+s)^{2}}\). What is the phase margin for this system?(a) \(-\pi \operatorname{rad}\)(b) \(0 \mathrm{rad}\)(c) \(\pi / 2 \mathrm{rad}\)(d) \(\pi \mathrm{rad}\)
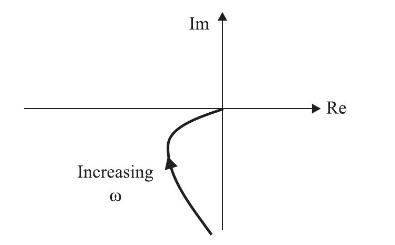
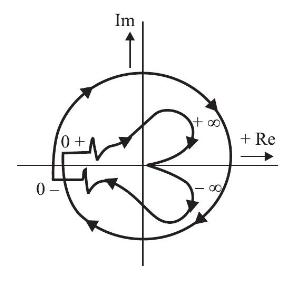
Which of the following is the transfer function of a system having the Nyquist plot as shown below?(a) Ks(s+2)2(s+5)Ks(s+2)2(s+5)(b) Ks2(s+2)(s+5)Ks2(s+2)(s+5)(c) K(s+1)s2(s+2)(s+5)K(s+1)s2(s+2)(s+5)(d) K(s+1)(s+3)s2(s+2)(s+5)K(s+1)(s+3)s2(s+2)(s+5) 0 0+. Im too! + Re
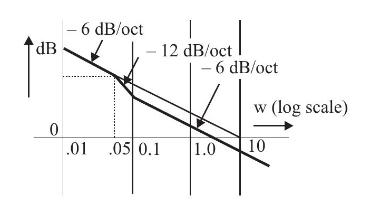
The system having the Bode magnitude plot as shown below has the transfer function(a) \(\frac{60(s+0.01)(s+0.1)}{s^{2}(s+0.05)^{2}}\)(b) \(\frac{100(1+10 s)}{s(1+20 s)}\)(c) \(\frac{3(s+0.05 s)}{s(s+0.1)(s+1)}\)(d) \(\frac{5(s+0.1)}{s(s+0.05)}\) dB 0 - 6 dB/oct 12 dB/oct .01 .05 0.1 - 6 dB/oct 1.0
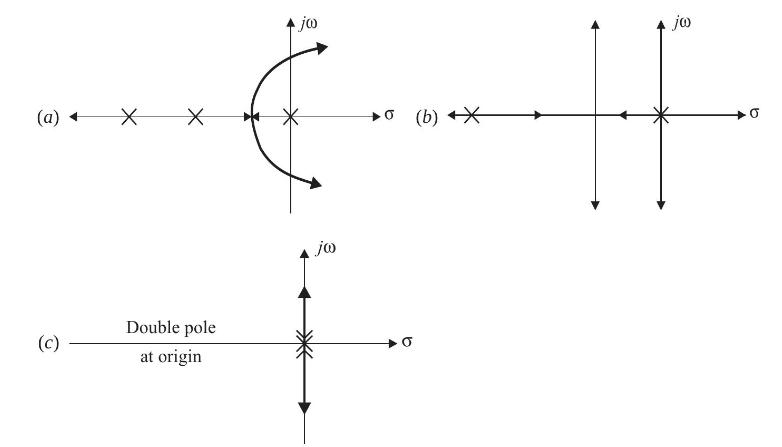
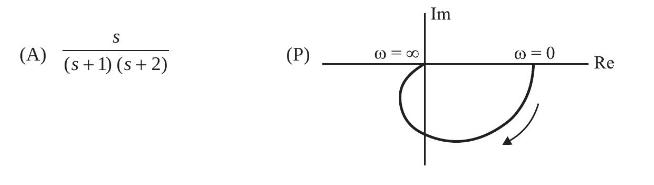
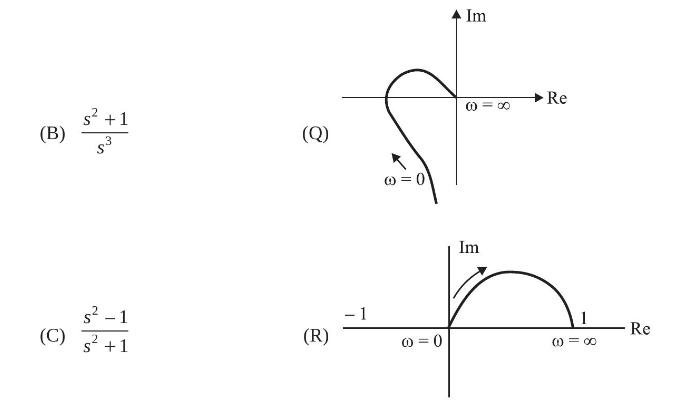
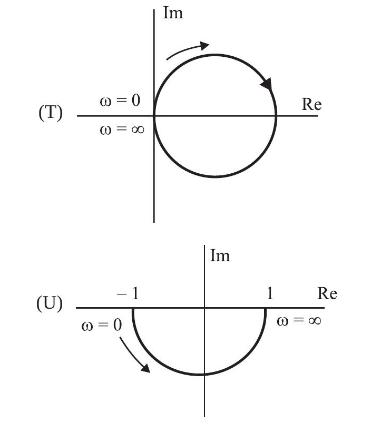
Match the polar plots for the following functions on the left hand side.Codes:(a) \(\mathrm{A}-\mathrm{T}, \mathrm{B}-\mathrm{S}, \mathrm{C}-\mathrm{U}, \mathrm{D}-\mathrm{P}\)(b) \(\mathrm{A}-\mathrm{R}, \mathrm{B}-\mathrm{T}, \mathrm{C}-\mathrm{U}, \mathrm{D}-\mathrm{P}\)(c)
A unity feedback system with the open loop transfer function \(\mathrm{G}(s)=\frac{1}{s(s+2)(s+4)}\) has gain margin of(a) \(33.6 \mathrm{~dB}\)(b) \(32.4 \mathrm{~dB}\)(c) \(32.6 \mathrm{~dB}\)(d) \(30.6 \mathrm{~dB}\)
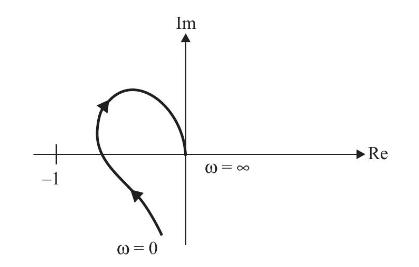
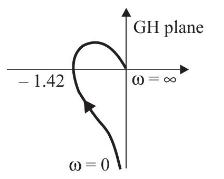
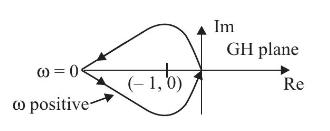
The polar plot of a type - 1, 3-pole, stable open-loop system is shown below. The closedloop system is(a) always stable(b) marginally stable(c) unstable with one pole on the right half s-plane(d) unstable with two poles on the right half s-plane. - 1.42 @=0 GH plane 3
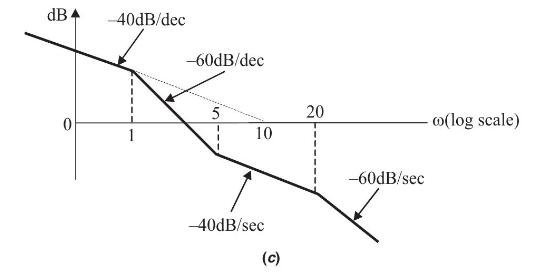
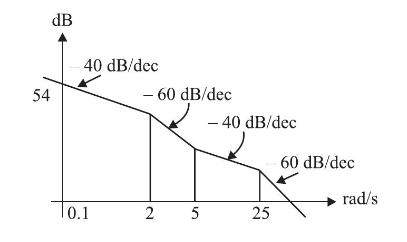
The asymptotic approximation of the log-magnitude versus frequency plot of a minimum phase system is shown below. Its transfer function is(a) \(\frac{20(s+5)}{s(s+2)(s+25)}\)(b) \(\frac{10(s+5)}{(s+2)^{2}(s+25)}\)(c) \(\frac{20(s+5)}{s^{2}(s+2)(s+25)}\)(d) \(\frac{50(s+5)}{s^{2}(s+2)(s+25)}\) 54 dB
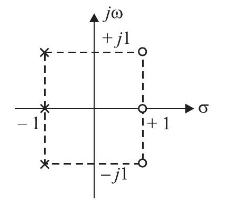
The pole-zero pattern of a certain filter is shown below. The filter must be of the following type times depicts pole and o depicts zero):(a) low-pass(b) high-pass(c) all-pass(d) band-pass jo +jl -j1 O
The open-loop transfer function of a feedback control system is\[\mathrm{G}(s) \mathrm{H}(s)=\frac{1}{(s+1)^{3}}\]The gain margin of the system is(a) 2(b) 4(c) 8(d) 16
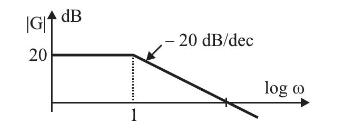
Bode plot of a stable system is shown below. The transfer function of the system is(a) \(\mathrm{G}(s)=\frac{100}{s+10}\)(b) \(\mathrm{G}(s)=\frac{10}{s+10}\)(c) \(\mathrm{G}(s)=\frac{10}{s+1}\)(d) \(\mathrm{G}(s)=\frac{10}{s+100}\) |G| 20 dB Y 1 20 dB/dec log o
Non-minimum phase transfer function is defined as the transfer function1. which has zeros in the right-half of \(s\) plane.2. which has zeros only in the left-half of \(s\) plane.3. which has poles in the right-half of \(s\) plane.4. which has poles in the left-half of s plane.Of these(a) 1 and 3
In the Bode plot of a unity feedback control system, the value of phase of \(G(j \omega)\) at the gain cross over frequency is \(-125^{\circ}\). The phase margin of the system is(a) \(-125^{\circ}\)(b) \(-55^{\circ}\)(c) \(55^{\circ}\)(d) \(125^{\circ}\)
The Nyquist plot of a loop transfer function \(\mathrm{G}(j \omega) \mathrm{H}(j \omega)\) of a system encloses the \((-1, j 0)\) point. The gain margin of the system is(a) less than zero(b) zero(c) greater than zero(d) infinity
The gain margin (in \(\mathrm{dB}\) ) of a system having the loop transfer function \(\mathrm{G}(s) \mathrm{H}(s)=\frac{\sqrt{2}}{s(s+1)}\) is(a) 0(b) 3(c) 6(d) \(\infty\)
The phase margin (in degrees) of a system having the loop transfer function \(\mathrm{G}(s) \mathrm{H}(s)=\frac{2 \sqrt{3}}{s(s+1)}\) is(a) 45(b) -30(c) 60(d) 30
The Nyquist plot for the open-loop transfer function \(\mathrm{G}(s)\) of a unity negative feedback system is shown below. If \(\mathrm{G}(s)\) has no pole in the right-half of \(s\) plane, the number of roots of the system characteristic equation in the right-half of \(s\)-plane is(a) 0(b) 1(c)
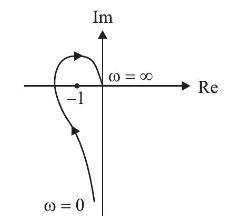
Figure shows the Nyquist plot of the open-loop transfer function \(\mathrm{G}(s) \mathrm{H}(s)\) of a system. If \(\mathrm{G}(s) \mathrm{H}(s)\) has one right-hand pole, the closed-loop system is(a) always stable.(b) unstable with one closed-loop right hand pole.(c) unstable with two closed-loop
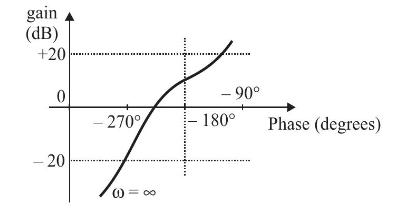
The gain-phase plot of a linear control system is shown below.What are gain margin (GM) and phase margin ( \(\mathrm{PM}\) ) of the system?(a) \(\mathrm{GM}>0 \mathrm{~dB}\) and \(\mathrm{PM}>0\) degree(b) \(\mathrm{GM}(c) \(\mathrm{GM}>0 \mathrm{~dB}\) and \(\mathrm{PM}(d)
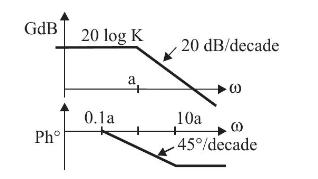
The asymptotic Bode plot of the transfer function \(\frac{\mathrm{K}}{1+\frac{s}{a}}\) is given in figure. The error in phase angle and \(\mathrm{dB}\) gain at a frequency of \(\omega=0.5 a\) are respectively(a) \(4.9^{\circ}, 0.97 \mathrm{~dB}\)(b) \(5.7^{\circ}, 3 \mathrm{~dB}\)(c) \(4.9^{\circ},
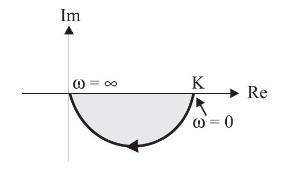
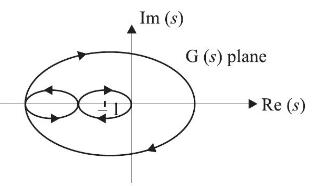
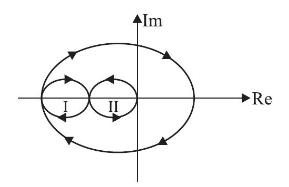
Consider the Nyquist diagram for given \(\mathrm{KG}(s) \mathrm{H}(s)\). The transfer function \(\mathrm{KG}(s) \mathrm{H}(s)\) has no poles and zeros in the right half of \(s\) plane. If the \((-1, j 0)\) point is located first in region I and then in region II, the change in stability of the
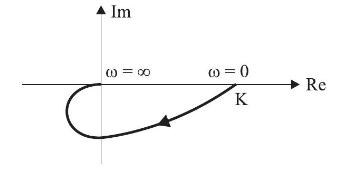
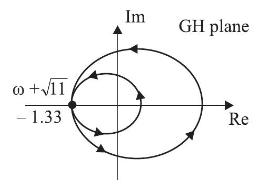
The Nyquist plot of a unity feedback system having open loop transfer function \(\mathrm{G}(s)=\frac{\mathrm{K}(s+3)(s+5)}{(s-2)(s-4)}\) for \(\mathrm{K}=1\) is as shown. For the system to be stable, the range of values of \(\mathrm{K}\) is(a) \(0(b) \(0(c) \(\mathrm{K}>1.33\)(d)
Showing 100 - 200
of 480
1
2
3
4
5
Step by Step Answers