New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
telecommunication engineering
Discrete Time Signal Processing 2nd Edition Alan V. Oppenheim, Rolan W. Schafer - Solutions
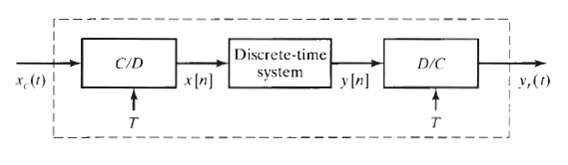
The autocorrelation sequence of a signal x[n] is defined as (a) Show that for an appropriate choice of the signal g[n], Rx[n] = x[n] * g[n], and identify the proper choice for g[n]. (b) Show that the Fourier transform of Rx[n] is equal to |X(ej?)|2.
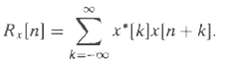
The signals x[n] and y[n] shown in Figure are the input and corresponding output for an LTI system. (a) Find the response of the system to the sequence x2[n] in Figure. (b) Find the impulse response h[n] for this LTI system.
Consider a system for which the input x[n] and output y[n] satisfy the difference equationy[n] – ½ y[n – 1] = x[n]and for which y [–1] is constrained to be zero for every input. Determine whether or not the system is stable. If you conclude that the system is stable, show your reasoning. If
The causality of a system was defined in section 2.2.4. From this definition, show that, for a linear time-invariant system, causality implies that the impulse response h[n] is zero for n < 0. One approach is to show that if h[n] is not zero n < 0, then the system cannot be causal. Show also
Consider a discrete-time system with input x[n] and output y[n]. When the input is x[n] = (1/4)n u[n],the output isy[n] = (1/2)n for all n. Determine which of the following statements is correct: The system must be LTI. The system could be LTI. The system
Consider an LTI system whose frequency response is H(ejω) = e–j ω/2, |ω| < π. Determine whether or not the system is causal. Show your reasoning.
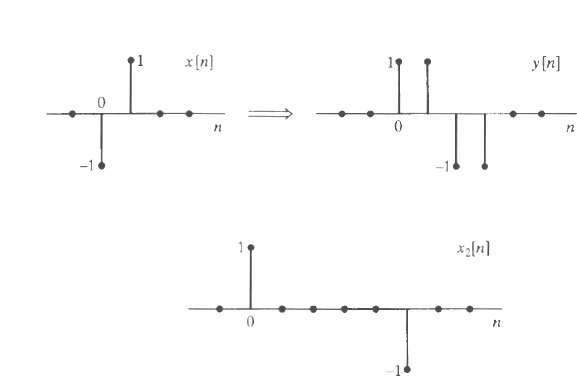
In Figure, two sequences x1[n] and x2[n] are shown. Both sequences are zero for all n outside the regions shown. The Fourier transforms of these sequences are X1(ej?) and X2(ej?), which, in general, can be expected to be complex and can be written in the form? X1(ej?) = A1(?) ej?1(?), X2(ej?) =
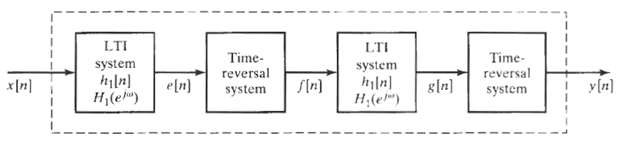
Consider the cascade of discrete-time systems in Figure. The time-reversal systems are defined by the equation f[n] = e[? n] and y[n] = g[? n]. Assume throughout the problem that x[n] and h1[n] are real sequences. (a) Express E(ej?), F(ej?), G(ej?), and Y(ej?) in terms of X(ej?) and H1(ej?). (b)
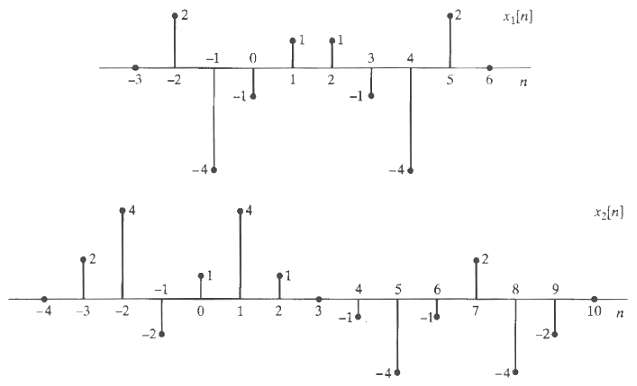
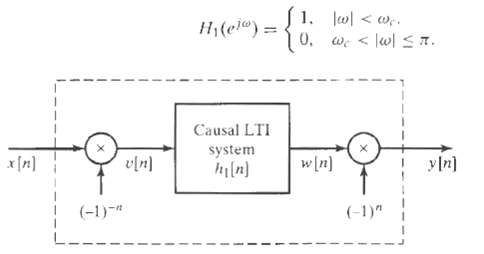
The overall system in the dotted box in Figure can be shown to be linear and time invariant. (a) Determine an expression for H(ej?), the frequency response of the overall system from the input x[n] to the output y[n], in terms of H1(e j?), the frequency?response of the internal LTI system. Remember
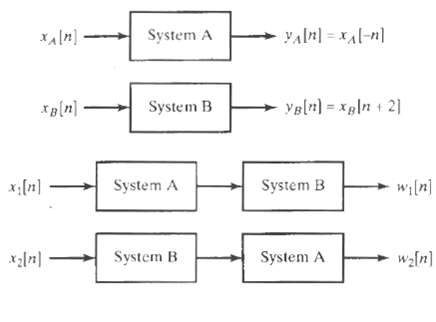
Figure shows the input-output relationships of systems A and B, while figure contains two possible cascade combinations of these systems. ?If x1[n] = x2[n], will w1[n] and w2[n] necessarily be equal? If your answer is yes, clearly and concisely explain why and demonstrate with an example. If your
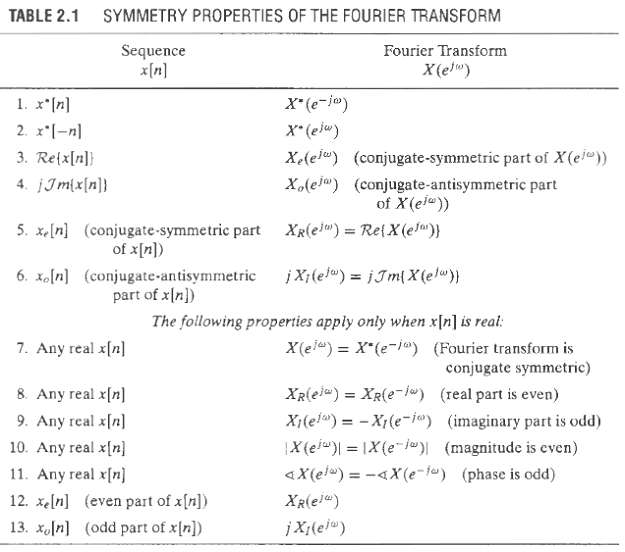
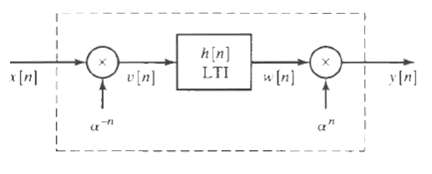
Consider the system in Figure, Where the subsystems S1 and S2 are LTI.(a) Is the overall system enclosed by the dashed box, with input x[n] and output y[n] equal to the product of y1[n] and y2[n], guaranteed to be an LTI system? If so, explain your reasoning. If not, provide a counterexample.(b)
A commonly used numerical operation called the first backward difference is defined as y[n] = ∆(x[n]) = x[n] – x[n – 1],where x[n] is the input and y[n] is the output of the first-backward-difference system.(a) Show that this system is linear and time invariant.(b) Find the impulse
Let H(ej?) denote the frequency response of an LTI system with impulse response h[n], where h[n] is, in general, complex. (a) Using Eq. (2.109), show that H *(e? j?) is the frequency response of a system with impulse response h *[n], where * denotes complex conjugation. (b) Show that if h[n] is
Let X(ej?) denote the Fourier transform of x[n].Using the Fourier transform syntheses or analyses equations (Eqs. (2.133) and (2.134)), show that (a) The Fourier transform of x*[n] is X*(e ?j?), (b) The Fourier transform of x*[? n] is X*(e?j?),
Show that for x[n] real, property 7 in Table 2.1 follows from property 1 and that properties 8 ? 11 follow from property 7.
In Section 2.9, we stated a number of Fourier transform theorems without proof. Using the Fourier syntheses or analyses equations ? (Eqs. (2.133) and (2.134)), demonstrate the validity of Theorems 1 ? 5 in Table 2.2.
In Section 2.9.6, it was argued intuitively that Y(ej?) = H(ej?) X(ej?), When Y(ej?), H(ej?), and X(ej?) are, respectively, the Fourier transforms of the output y [n], impulse response h[n], and input x[n] of a linear time-invariant system; i.e., Verify Eq. (p2.75-1) by applying the Fourier
By applying the Fourier synthesis equation (Eq. (2.133)) to Eq. (2.172) and using Theorem 3 in Table 2.2, demonstrate the validity of the modulation theorem (Theorem 7, Table 2.2).
Let x [n] and y [n] denote complex sequences and X(ej?) and Y(ej?) their respective Fourier transforms. (a) By using the convolution theorem (Theorem 6 in Table 2.2) and appropriate properties from Table 2.2, determine, in terms of x[n] and y[n], the sequence whose Fourier transform is X(ej?)
Let x[n] and X(ejω) represent a sequence and its Fourier transform, respectively. Determine in terms of X(ejω), the transforms of ys[n], yd[n], and ye[n] In each case, sketch y(ejω) for X(ejω) as shown in Figure.(a) Sampler:Note that(b) Compressor:yd[n] = x[2n].(c) Expander:
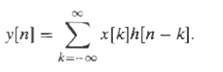
The two-frequency correlation function Фx(N, ω) is often used in radar and sonar to evaluate the frequency and travel-time resolution of a signal. For discrete-time signals, we define
Let x[n] and y[n] be stationary, uncorrelated random signals. Show that if w[n] = x[n] + y[n], then
Let e[n] denote a white-noise sequence, and let s[n] denote a sequence that is uncorrelated with e[n]. Show that the sequencey[n] = s[n]e[n] is white, i.e., thatE{y[n] y[n + m]} = Aδ[m],where A is a constant.
Consider a random signal x[n] = s[n] + e[n], where both s[n] and e[n] are independent zero-mean stationary random signals with autocorrelation functions Фss [m] and Фee [m] respectively.(a) Determine expressions for Фxx[m] and Фxx(ejω).(b) Determine expressions for Фxe[m] and
Consider an LTI system with impulse response h[n] = anu[n] with |?| (a) Compute the deterministic autocorrelation function ?hh[m] for this impulse response. (b) Determine the energy density function |H(ej?)|2 for the system. (c) Use Parseval?s theorem to evaluate the integral for the system.
The input to the first-backward-difference system (Example 2.10) is a zero-mean white-noise signal whose autocorrelation function is Фxx [m] = σ2x δ [m].(a) Determine and plot the autocorrelation function and the power spectrum of the corresponding output of the system.(b) What is the average
Let x[n]be a real, stationary, whit-noise process, with zero mean and variance ?2x. Let y[n] be the corresponding output when x[n] is the input to a linear time-invariant system with impulse response h [n]. Show that
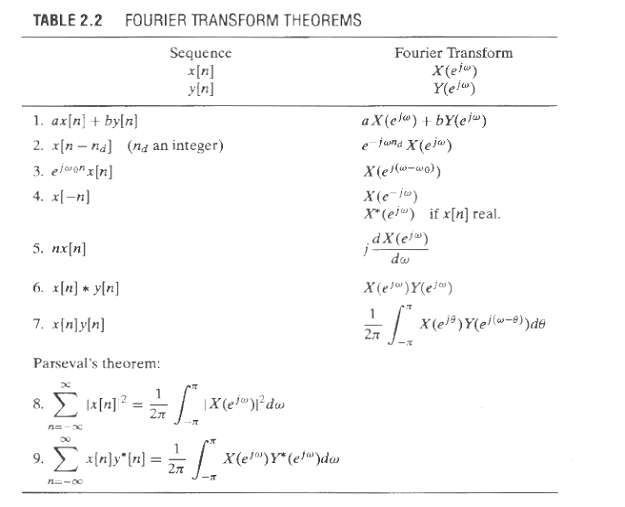
Let x[n] be a real stationary white-noise sequence, with zero mean and variance σ2x. Let x [n] be the input to the cascade of two causal linear time-invariant discrete-time systems, as shown in Figure(c) Let h1[n] = an u[n] and h2[n] = bn u[n]. Determine the impulse response of the
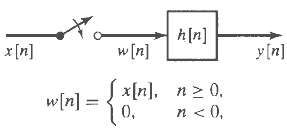
Sometimes we are interested in the statistical behavior of a linear time-invariant system when the input is a suddenly applied random signal. Such a situation is depicted in Figure. Let x[n] be a stationary white-noise process. The input to the system, w[n], given by? is a non stationary process,
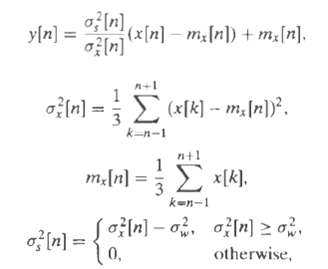
Let x[n] and y[n] respectively denote the input and output of a system. The input-output relation of a system sometimes used for the purpose of noise reduction in images is given by where, and ?2w is a known constant proportional to the noise power. (a) Is the system linear?? (b) Is the system
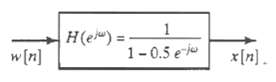
Consider a random process x[n] that is the response of the linear time-invariant system shown in Figure P2.89-1. In the figure, w[n] represents a real zero-mean stationary white-noise process with? (a) Express ?{x2[n]} in terms of ?xx[n] or ?xx(ej?). (b) Determine ?xx(ej?), the power density
Consider a linear time-invariant system whose impulse response is real and is given by h[n]. Suppose the responses of the system to the two inputs x[n] and v[n] are, respectively, y[n] and z[n], as shown in Figure. The inputs x[n] and v[n] in the figure represent real zero-mean stationary random
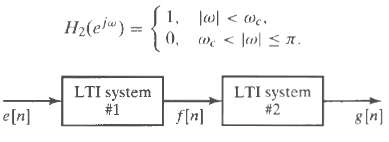
Consider the LTI system shown in Figure. The input to this system, e[n], is a stationary zero-mean white-noise signal with average power ?2e. The first system is a backward difference system as defined in Eq. 2.45 with f[n] = e[n] ? e[e ? n]. The second system is an ideal low pass filter with
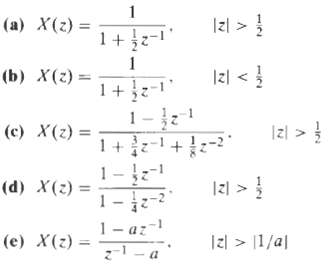
Determine the z-transform, including the region of convergence, for each of the following sequences:(a) (1/2)n u[n](b) – (1/2n u[–n – 1] (c) (1/2)n u[–n](d) δ[n](e) δ[n –1](f) δ[n +1](g) (1/2) n (u[n] – u[n – 10])
Determine the z-transform of the sequence
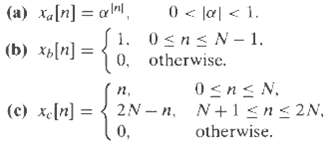
Determine the z-transform of each of the following sequences. Include with your answer the region of convergence in the z-plane and a sketch of the pole-zero Plot. Express all sums in closed form; a can be complex.
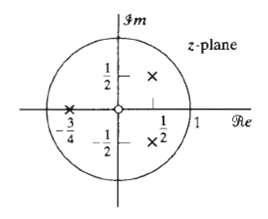
Consider the z-transform X(z) whose pole-zero plot is as shown in figure. (a) Determine the region of convergence of X(z) if it is known that the Fourier transform exists. For this case, determine whether the corresponding sequence x[n] is right sided, lift sided, or two sided; (b) How many
Determine the sequence x[n] with z-transformX(z) = (1 + 2z)(1 + 3z -1)(1 – z -1).
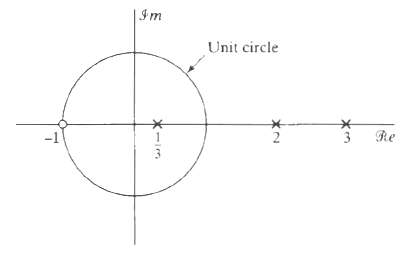
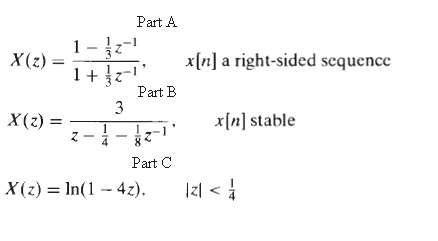
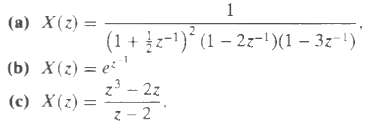
Following are several z-transforms. For each, determine the inverse z-transform using both methods?partial fraction expansion and power series expansion?discussed in Section 3.3. In addition, indicate in each case whether the Fourier transform exists.
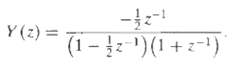
The input to a causal linear time-invariant system is x[n] = u[?n ? 1] + (1/2)nu[n]. The z-transform of the output of this system is? (a) Determine H(z), the z-transform of the system impulse response. Be sure to specify the region of convergence. (b) What is the region of convergence for
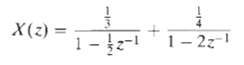
The system function of a causal linear time-invariant system isThe input to this system is x[n] = (1/3)n u[n] + u[–n – 1].(a) Find the impulse response of the system, h[n].(b) Find the output y[n].(c) Is the system stable? That is, is h[n] absolutely summable?
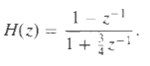
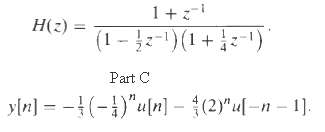
A causal LTI system has impulse response h [n], for which the z-transform is, (a) What is the region of convergence of H (z)? (b) Is the system stable? Explain. (c) Find the z-transform X(z) of an input x[n] that will produce the output, y[n] = ? 1/3(?1/4)nu[n] ? 4/3(2)nu[?n ? 1]. (d) Find the
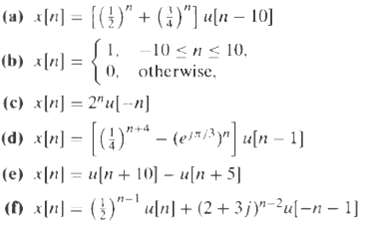
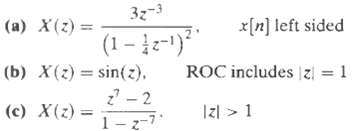
Without explicitly solving for X(z), find the region of convergence of the z-transform of each of the following sequences, and determine whether the Fourier transform converges:
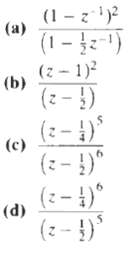
Following are four z-transforms. Determine which ones could be the z-transform of a causal sequence. Do not evaluate the inverse transform. You should be able to give the answer by inspection. Clearly state your reasons in each case.
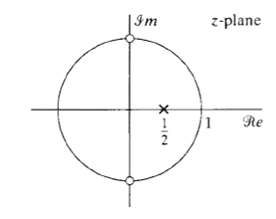
Sketch the pole-zero plot for each of the following z-transforms and shade the region of convergence:
A causal sequence g[n] has the z-transformG(z) = sin(z – 1)(1 + 3z – 2 + 2z – 4). Find g[11].
When the input to an LTI system isx[n] =(1/3)n u[n] + (2)n u[–n – 1], the corresponding output isy[n] = 5(1/3)n u[n] – 5(2/3)n u[n].(a) Find the system function H(z) of the system. Plot the pole(s) and zero(s) of H(z) and indicate the region of convergence.(b) Find
Consider an LTI system with input x[n] and output y[n] that satisfies the difference equationy[n] – 5/2 y[n – 1] + y[n – 2] = x[n] – x[n – 1].Determine all possible values for the system’s impulse response h[n] at n = 0.
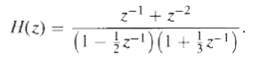
A causal LTI system has the system function (a) Find the impulse response of the system, h[n]. (b) Find the output of this system, y[n], for the input x[n] = ej(?/2) n.
For each of the following pairs of input z-transform X(z) and system function H(z), determine the region of convergence for the output z-transform Y(z):
For each of the following pairs of input and output z-transforms X(z) and Y(z), determine the region of convergence for the system function H(z):
Consider a linear time-invariant system with impulse response 0, k[n] 0. n (a) Determine the output y[n] by explicitly evaluating the discrete convolution of x[n] and h[n]. (b) Determine the output y[n] by computing the inverse z-transform of the product of the z-transforms of x[n] and h[n].
Consider an LTI system that is stable and for which H(z), the z-transform of the impulse response, is given by Suppose x[n], the input to the system, is a unit step sequence. (a)Find the output y[n] by evaluating the discrete convolution of x[n] and h[n]. (b) Find the output y[n] by computing the
An LTI system is characterized by the system function (a) Determine the impulse response of the system. (b) Determine the difference equation relating the system input x[n] and the system output y[n].
Sketch each of the following sequences and determine their z-transforms, including the region ofconvergence:
Consider a right-sided sequence x[n] with z-transform, In section 3.3 we considered the determination of x[n] by carrying out a partial fraction expansion, with X(z) considered as a ratio of polynomials in z?1. Carry out a partial fraction expansion of X(z), considered as a ratio of polynomials
Determine the inverse z-transform of each of the following. In parts (a)?(c), use the methods specified. In part (d), use any method you prefer. (a) Long division: (b) Partial fraction: (c) Power series: (d) x(z) = 1/1 ? 1z -3. |z| > (3)-1
Using any method, determine the inverse z-transform for each of the following:
Determine the inverse z-transform of each of the following. You should find the z-transform properties in section 3.4 helpful. 1 " alt="Determine the inverse z-transform of each of the following. You" class="fr-fic fr-dii">
Determine a sequence x [n] whose z-transform is X(z) = ez + e1\z, z ≠ 0.
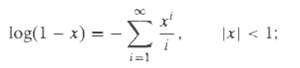
Determine the inverse z-transform of? X(z) = log 2(1/2 ? z), ? ? ? ? ? ? ? |z| ?by (a) Using the power series (b) First differentiating X(z) and then using the derivative to recover x[n].
For each of the following sequences, determine the z- transform and region of convergence, and sketch the pole-zero Diagram: (a) x[n] = anu[n] + bnu[n] cnu[? n ? 1],? ? ? ? ? ?? |a| (b) x[n] = n2anu[n] (c)
The pole-zero diagram in figure corresponds to the z-transform X(z) of a causal sequence x[n] Sketch the pole-zero diagram of Y(z), where y[n] = x[??? n + 3]. Also, specify the region of convergence for Y(z).
Let x[n] be the sequence with the pole-zero plot shown in Figure. Sketch the pole-zero plot for:? (a) y[n] = (1/2)n x[n]? (b) w[n] = cos (?n/2) x[n]
Consider an LTI system that is stable and for which H(z), the z-transform of the impulse response, is given by Suppose x[n], the input to the system, is a unit step sequence. (a) Find the output y[n] by evaluating the discrete convolution of x[n] and h[n]. (b) Find the output y[n] by computing
Determine the unit step response of the causal system for which the z-transform of the impulse response is
If the input x[n] to an LTI system is x[n] = u[n], the output is y[n] = (1/2)n–1u[n + 1].(a) Find H(z), the z-transform of the system impulse response, and plot its pole-zero diagram.(b) Find the impulse response h[n].(c) Is the system stable?(d) Is the system causal?
Consider a sequence x[n] for which the z-transform is and for which the region of convergence includes the unit circle. Determine x[0] using the initial-value theorem.
Consider a stable linear time-invariant system. The z-transform of the impulse response is Suppose x[n], the input to the system, is 2u[n]. Determine y[n] at n =1.
Suppose the z-transform of x[n] is It is also known that x[n] is a stable sequence. (a) Determine the region of convergence of X(z). (b) Determine x[n] at n = ? 8.
In Figure, H(z) is the system function of a causal LTI system.(a) Using z-transforms of the signals shown in figure, obtain an expression for W(z) in the formW(z) = H1(z) X(z) + H2(z) E(z),where both H1(z) and H2(z) are expressed in terms of H(z).(b) For the special case H(z) = z–1 /(1 –
In Figure, h[n] is the impulse response of the LTI system within the inner box. The input to system h[n] is v[n], and the output is w[n]. The z-transform of h[n], H(z), exists in the following region of convergence: 0 ?min max (a) Can the LTI system with impulse response h[n] BIBO stable? If so,
A causal and stable LTI system S has its input x[n] and output y[n] related by the linear constant-coefficient difference equation, Let the impulse response of S be the sequence h[n]. (a) Show that h[0] must be nonzero. (b) Show that ?1 can be determined from the knowledge of h[0] and h[1]. (c)
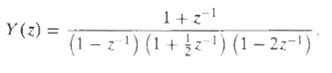
When the input to an LTI system is x[n] = (1/2)nu[n] + 2n u[– n – 1], the output isy[n] = 6 (1/2)nu[n] – 6 (3/4)nu[n].(a) Find the system function H(z) of the system. Plot the poles and zeros of H(z), and indicate the region of convergence.(b) Find the impulse response h[n] of the
When the input to a causal LTI system is? x[n] = ?1/3 (1/2)nu[n] ? 4/3 2nu[? n ? 1], the z-transform of the output is (a) Find the z-transform of x[n]. (b) What is the region of convergence of Y(z)? (c) Find the impulse response of the system. (d) Is the systems table?
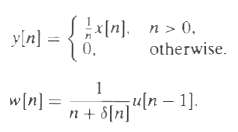
Let x[n] be a discrete-time signal with x[n] = 0 for n ? 0 and z-transform X(z). Further-more, given x[n], let the discrete-time signal y[n] be defined by (a) Compute Y(z) in terms of X(z). (b) Using the result of Part (a), find the z-transform of 0. 0. otherwise. uln- 1]. n+ 8[n] w[n] = "
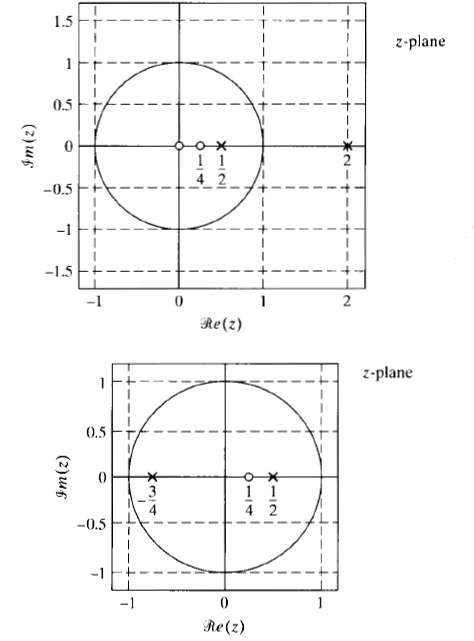
The signal y[n] is the output of an LTI system with impulse response h[n] for a given input x[n]. Throughout the problem, assume that y[n] is stable and has a z-transform Y(z) with the pole-zero diagram shown in Figure. The signal x[n] is stable and has the pole-zero diagram shown in figure. (a)
Let x[n] denote a causal sequence; i.e., x[n] = 0, n < 0. Furthermore, assume that x[0] ≠ 0.(a) Show that there are no poles or zeros of X(z) at z = ∞, i.e., that lim z→∞ X(z) is nonzero and finite.(b) Show that the number of poles in the finite z-plane equals the number of zeros in
Consider a sequence with z-transform X(z) = P(z) / Q(z), where P(z) and Q(z) are polynomials in z. If the sequence is absolutely summable and if all the roots of Q(z) are inside the unit circle, is the sequence necessarily causal? If your answer is yes, clearly explain. If your answer is no, give a
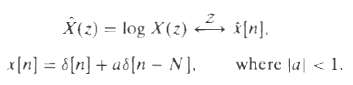
Let x[n] be a causal stable sequence with z-transform X(z). The complex cepstrum x[n] is defined as the inverse transform of the logarithm of X(z); i.e., where the ROC of X(z) includes the unit circle. (Strictly speaking, taking the logarithm of a complex number requires some careful
Assume that x[n] is real and even; i.e., x[n] = x[– n]. Further, assume that z0 is a zero of X(z); i.e., X(z0) = 0.(a) Show that 1/z0 is also a zero of X(z).(b) Are there other zeros of X(z) implied by the information given?
Using the definition of the z-transform in Eq. (3.2), show that if X(z) is the z-transform of x[n] = xR[n] + jx1[n], then
Consider a real sequence x[n] that has all the poles and zeros of its z-transform inside the unit circle. Determine, in terms of x[n], a real sequence x1[n] not equal to x[n], but for which x1[0] = x[0], |x1[n]| = |x[n]|, and the z-transform of x1[n] has all its poles and zeros inside the unit
A real finite-duration sequence whose z-transform has no zeros at conjugate reciprocal pair locations and no zeros on the unit circle is uniquely specified to within a positive scale factor by its Fourier transform phase (Hayes et al., 1980). An example of zeros at conjugate reciprocal pair
For a sequence x [n] that is zero for n < 0, use Eq. (3.2) to show that lim z→∞ X (z) = x [0]. What is the corresponding theorem if the sequence is zero for n > 0?
The a periodic auto correlation function for a real-valued stable sequence x[n] is defined as (a) Show that the z-transform of cx[n] is? Cxx(z) = X(z) X(z?1). ?Determine the region of convergence for Cxx(z). (b) Suppose that x[n] = an u[n]. Sketch the pole-zero plot for Cxx(z), including the
Determine whether or not the function X(z) = z* can correspond to the z-transform of a sequence. Clearly explain your reasoning.
Let X(z) denote a ratio of polynomials in z; i.e.,? Show that if X(z) has a first-order pole at z = z0, then the residue of X(Z) at z = z0 is equal to, where A?(z0) denotes the derivative of A(z) evaluated at z = z0.
The signal xc(t) = sin(2π (100)t)was sampled with sampling period T = 1/400 second to obtain a discrete-time signal x[n]. What is the resulting signal x[n]?
The sequence x[n] = cos (π/4 n). −∞ < n < ∞was obtained by sampling a continuous-time signal xc(t) = cos (Ω0t). −∞ < t < ∞,at a sampling rate of 1000 samples/s, what are two possible positive
The continuous-time signal xc(t) = cos (4000π t)is sampled with a sampling period T to obtain a discrete-time signalx[n] = cos (π n/3).(a) Determine a choice for T consistent with this information.(b) Is your choice for T in part (a) unique? If so, explain why. If not, specify another choice
The continuous-time signal xc(t) = sin (20π t) + cos (40π t)is sampled with a sampling period T to obtain the discrete-time signal x[n] = sin (π n/5) + cos (2π n/5).(a) Determine a choice for T consistent with this information.(b) Is your choice for T in part (a) unique? If so,
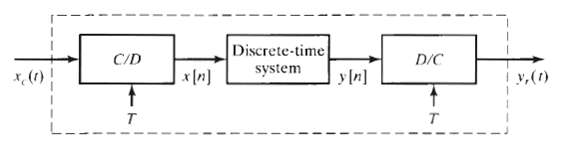
Consider the system of Figure, with the discrete-time system an ideal lowpass filter with cutoff frequency ?/8 radians/s.? (a) If xc(t) is bandlimited to 5 kHz, what is the maximum value of T that will avoid aliasing in the C/D converter? (b) If 1/T = 10 kHz, what will the cutoff frequency of the
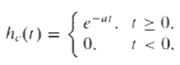
Let hc(t) denote the impulse response of a linear time-invariant continuous-time filter and hd[n] the impulse response of a linear time-invariant discrete-time filter.(a) If(b) If hd[n] = Thc(nT) with hc(t) as in part (a), determine the discrete-time filter frequency response and sketch its
A simple model of a multipath communication channel is indicated in Figure. Assume that sc(t) is band limited such that Sc(j?) = 0 for |?| ? ? / T and that xc(t) is sampled with a sampling period T to obtain the sequence x[n] = xc(nT). (a) Determine the Fourier transform of xc(t) and the Fourier
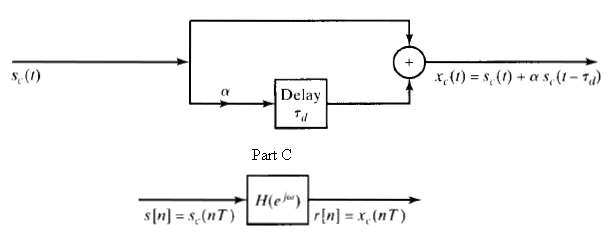
Consider the system in Figure with the following relations: (a) For this system, what is the maximum allowable value of T if aliasing is to be avoided, i.e., that xc(t) can be recovered from x[n]. (b) Determine h[n]? (c) In terms of X(ej?), what is the vale of y[n] = ?? (d) Determine whether there
Consider a stable discrete-time signal x[n] whose discrete-time Fourier transform X(ejω) satisfies the equation X (ejω) = X (ej(ω–π))and has even symmetry, i.e., x[n] = x[– n].(a) Show that X(ejω) is periodic with a period π. (b) Find the value of x[3]. (c) Let y[n] be the
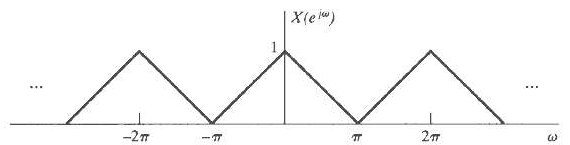
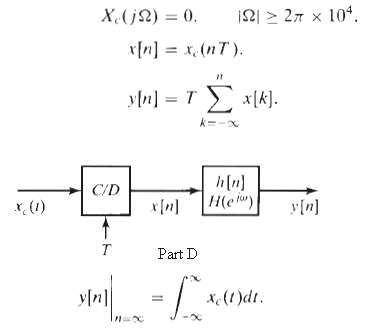
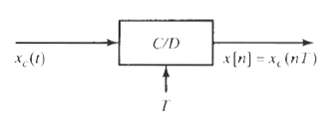
Each of the following continuous-time signals is used as the input xc(t) for an ideal C/D converter as shown in Figure with the sampling period T specified. In each case, find the resulting discrete-time signal x[n]. (a) xc(t) = cos (2? (1000)t), ? ? ? ? ? ? ? ??T = (1/300) sec (b) xc(t) = sin (2?
The following continuous-time input signals xc(t) and corresponding discrete-time output signals x[n] are those of an ideal C/D as shown in Figure. Specify a choice for the sampling period T that is consistent with each pair of xc(t) and x[n]. In addition, indicate whether your choice of T is
In the system of Figure, assume that? H(ej?) = j?/ T,? ? ? ? ? and T = 1/10 sec. (a) For each of the following inputs xc(t), find the corresponding output yc(t). (i) xc(t) = cos(6? t)? (ii) xc(t) = cos(14? t) (b) Are the output yc(t) those you would expect from a differentiator?
Showing 400 - 500
of 1744
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Last
Step by Step Answers
![yı[n] S1 y[n] x[n] S2 y2[n] Part b 0, unspecified, 0.27 < |w < x, |wl < 0.27, Hi(ei](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1549/8/8/9/3845c616f6833fba1549936310483.jpg)



![x[n+ N]x*[n – N]e¬jom Ox{N, w) = %3D n=-00 (a) Show that Ox(-N. -w) = 0;(N, w). (b) If 0 < a < 1, x[n] = Aa](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1553/0/6/9/9635c91f78bb325e1553069964949.jpg)
![hi[n} x [n] = o? £k-0 ha[n] y[n] w [n] |(a) Is o h{[k]? (b) Is o=D oΣkE0 h[시? uk:](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1549/9/4/7/9275c625417149b41549994853973.jpg)




![e[n] Не) v[n] w[n} x[n]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1549/9/5/7/4085c627920acb8c1550004336067.jpg)

![|X(z) : v_2[u]x Z = (2)X n=-00](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1549/9/5/8/7785c627e7a697861550005705229.jpg)
.PNG)


![C/D x.(1) x [n] = x,(nT)](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1549/9/6/5/7555c6299bbcb82d1550012681709.jpg)