New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
mechanical vibration analysis
Mechanical Vibrations 6th Edition Singiresu S Rao - Solutions
True or False.The rigid body mode is also called the zero mode.
True or False.An unrestrained system is also known as a semidefinite system.
True or False.Newton's second law of motion can always be used to derive the equations of motion of a vibrating system.
Fill in the Blank.The spring constant denotes the _________ necessary to cause a unit elongation.
Fill in the Blank.The flexibility influence coefficient \(a_{i j}\) denotes the deflection at point _________ due to a unit load at point _________ .
Fill in the Blank.The force at point \(i\) due to a unit displacement at point \(j\), when all the points other than the point \(j\) are fixed, is known as _________ influence coefficient.
Fill in the Blank.The mode shapes of a multi-degree-of-freedom system are _________ .
Fill in the Blank.The equations of motion of a multi-degree-of-freedom system can be expressed in terms of _________ coefficients.
Fill in the Blank.Lagrange's equations are expressed in terms of _________ coordinates.
Fill in the Blank.The value of the Kronecker delta \(\left(\delta_{i j}\right)\) is 1 for \(i=j\) and _________ for \(i eq j\).
Fill in the Blank.The stiffness matrix of a semidefinite system is _________ .
Fill in the Blank.A multi-degree-of-freedom system can have at most _________ rigid-body modes.
Fill in the Blank.When the solution vector is denoted as a linear combination of the normal modes as \(\vec{x}(t)=\sum_{i=1}^{n} q_{i}(t) \vec{X}^{(i)}\), the generalized coordinates \(q_{i}(t)\) are also known as the _________ participation coefficients.
Fill in the Blank.Any set of \(n\) linearly independent vectors in an \(n\)-dimensional space is called a(n) _________.
Fill in the Blank.The representation of an arbitrary \(n\)-dimensional vector as a linear combination of \(n\)-linearly independent vectors is known as _________ theorem.
Fill in the Blank.The _________ analysis is based on the expansion theorem.
Fill in the Blank.The \(\overline{\text { modal analysis basically }}\) _________ the equations of motion.
Fill in the Blank.The eigenvalues of an \(n\)-degree-of-freedom system form a(n) _________ in the \(n\)-dimensional space.
Fill in the Blank.The application of Lagrange's equations requires the availability of _________ expressions.
Fill in the Blank.The determinantal equation, \(\left|[k]-\omega^{2}[m]\right|=0\), is known as the _________ equation.
Fill in the Blank.The symmetry of stiffness and flexibility matrices is due to the _________ reciprocity theorem.
Fill in the Blank.Maxwell's reciprocity theorem states that the influence coefficients are _________.
Fill in the Blank.The stiffness matrix is positive definite only if the system is _________.
Fill in the Blank.During free vibration of an undamped system, all coordinates will have _________ motion.
Fill in the Blank.In proportional damping, the damping matrix is assumed to be a linear combination of the _________ and _________ matrices.
The number of distinct natural frequencies for an \(n\)-degree-of-freedom system can bea. 1b. \(\infty\)c. \(n\)
The dynamical matrix, \([D]\), is given bya. \([k]^{-1}[m]\)b. \([m]^{-1}[k]\)c. \([k][m]\)
The orthogonality of modes impliesa. \(\vec{X}^{(i)^{T}}[m] \vec{X}^{(j)}=0\) onlyb. \(\vec{X}^{(i)^{T}}[k] \vec{X}^{(j)}=0\) onlyc. \(\vec{X}^{(i)^{T}}[m] \vec{X}^{(j)}=0\) and \(\vec{X}^{(i)^{T}}[k] \vec{X}^{(j)}=0\)
The modal matrix, \([\mathrm{X}]\), is given bya. \([X]=\left[\begin{array}{llll}\vec{X}^{(1)} & \vec{X}^{(2)} & \cdots & \vec{X}^{(n)}\end{array}\right]\)b. \([X]=\left[\begin{array}{c}\vec{X}^{(1)^{T}} \\ \vec{X}^{(2)^{T}} \\ \vdots \\ \vec{X}^{(n)^{T}}\end{array}\right]\)c. \([X]=[k]^{-1}[m]\)
Rayleigh's dissipation function is used to generate aa. stiffness matrixb. damping matrixc. mass matrix
The characteristic equation of an \(n\)-degree-of-freedom system is aa. transcendental equationb. polynomial of degree \(n\)c. differential equation of order \(n\)
The fundamental natural frequency of a system isa. the largest valueb. the smallest valuec. any value
Negative damping leads toa. instabilityb. fast convergencec. oscillations
The Routh-Hurwitz criterion can be used to investigate thea. convergence of a systemb. oscillations of a systemc. stability of a system
The stiffness and flexibility matrices are related asa. \([k]=[a]\)b. \([k]=[a]^{-1}\)c. \([k]=[a]^{T}\)
A system for which \([k]\) is positive and \([\mathrm{m}]\) is positive definite is called a(n)a. semidefinite systemb. positive-definite systemc. indefinite system
\([m]\)-orthogonality of modal vectors impliesa. \(\vec{X}^{(i)^{T}}[m] \vec{X}^{(i)}=0\)b. \(\vec{X}^{(i)^{T}}[m] \vec{X}^{(j)}=0\)c. \([X]^{T}[m][X]=\left[\omega_{i}^{2}\right]\)
Modal analysis can be used conveniently to find the response of a multidegree-offreedom systema. under arbitrary forcing conditionsb. under free-vibration conditionsc. involving several modes
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
a. equal to zero yields the characteristic valuesb. equal to \(\left[\omega_{i}^{2}\right]\) when modes are normalizedc. kinetic energy of the systemd. equal to zero when modes are orthogonale. equal to the dynamical matrix \([D]\)f. strain energy of the system g. equal to the applied force vector
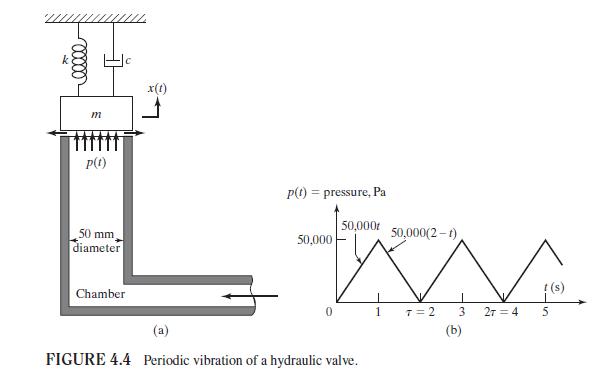
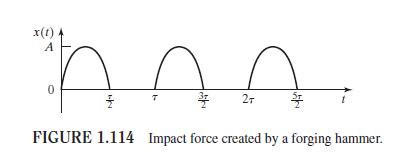
Find the steady-state response of the hydraulic control valve shown in Fig. 4.4 (a) to the forcing functions obtained by replacing \(x(t)\) with \(F(t)\) and \(A\) with \(F_{0}\) in Figs. 1.114.Figure 4.4 (a) and Figure 1.114:- 00000 m p(t) x(t) 50 mm, diameter p(t) = pressure, Pa 50,000 50,000t
What is the basis for expressing the response of a system under periodic excitation as a summation of several harmonic responses?
The transient part of the solution arises froma. forcing functionb. initial conditionsc. bounding conditions
True or False.The change in momentum is called impulse.
Fill in the Blank.The response of a linear system under any periodic force can be found by ___________ appropriate harmonic responses.
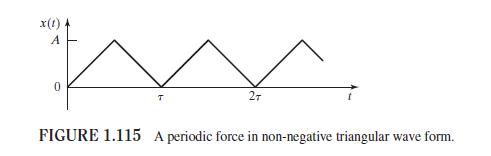
Find the steady-state response of the hydraulic control valve shown in Fig. 4.4 (a) to the forcing functions obtained by replacing \(x(t)\) with \(F(t)\) and \(A\) with \(F_{0}\) in Figs. 1.115.Figure 4.4 (a) and Figure 1.114:- 00000 m p(t) x(t) 50 mm, diameter p(t) = pressure, Pa 50,000 50,000t
Indicate some methods for finding the response of a system under nonperiodic forces.
If a system is subjected to a suddenly applied nonperiodic force, the response will bea. periodicb. transientc. steady
True or False.The response of a system under arbitrary force can be found by summing the responses due to several elementary impulses.
Fill in the Blank.Any nonperiodic function can be represented by a(n) ___________ integral.
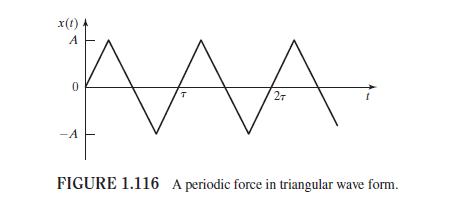
Find the steady-state response of the hydraulic control valve shown in Fig. 4.4 (a) to the forcing functions obtained by replacing \(x(t)\) with \(F(t)\) and \(A\) with \(F_{0}\) in Figs. 1.116.Figure 4.4 (a) and Figure 1.114:- 00000 m p(t) x(t) 50 mm, diameter p(t) = pressure, Pa 50,000 50,000t
What is the Duhamel integral? What is its use?
The initial conditions are to be applied to aa. steady-state solutionb. transient solutionc. total solution
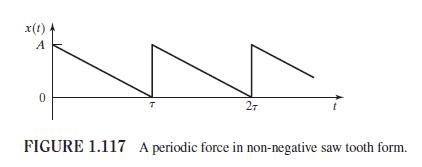
Find the steady-state response of the hydraulic control valve shown in Fig. 4.4 (a) to the forcing functions obtained by replacing \(x(t)\) with \(F(t)\) and \(A\) with \(F_{0}\) in Figs. 1.117.Figure 4.4 (a) and Figure 1.114:- 00000 m p(t) x(t) 50 mm, diameter p(t) = pressure, Pa 50,000 50,000t
True or False.The response spectrum corresponding to base excitation is useful in the design of machinery subject to earthquakes.
Fill in the Blank.An impulse force has a large magnitude and acts for a very _________ period of time.
How are the initial conditions determined for a single-degree-of-freedom system subjected to an impulse at \(t=0\) ?
The acceleration spectrum \(\left(S_{a}\right)\) can be expressed in terms of the displacement spectrum \(\left(S_{d}\right)\) asa. \(S_{a}=-\omega_{n}^{2} S_{d}\)b. \(S_{a}=\omega_{n} S_{d}\)c. \(S_{a}=\omega_{n}^{2} S_{d}\)
True or False.Some periodic functions cannot be replaced by a sum of harmonic functions.
Fill in the Blank.The response of a single-degree-of-freedom system to a unit ____________ impulse response function.
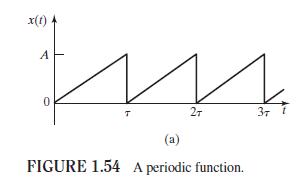
Find the steady-state response of a viscously damped system to the forcing function obtained by replacing \(x(t)\) and \(A\) with \(F(t)\) and \(F_{0}\), respectively, in Fig. 1.54(a). x(1) A A 0 2T 37 t (a) FIGURE 1.54 A periodic function.
Derive the equation of motion of a system subjected to base excitation.
The pseudo spectrum is associated witha. pseudo accelerationb. pseudo velocityc. pseudo displacement
True or False.The amplitudes of higher harmonics will be smaller in the response of a system.
Fill in the Blank.The Duhamel integral is also known as the ___________ integral.
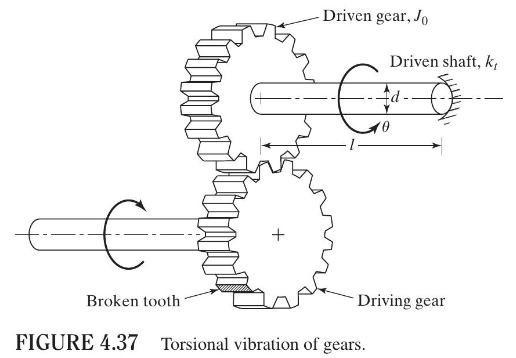
The torsional vibrations of a driven gear mounted on a shaft (see Fig. 4.37) under steady conditions are governed by the equation\[J_{0} \ddot{\theta}+k_{t} \theta=M_{t}\]where \(k_{t}\) is the torsional stiffness of the driven shaft, \(M_{t}\) is the torque transmitted, \(J_{0}\) is the mass
What is a response spectrum?
The Fourier coefficients are to be found numerically when the values of the function \(f(t)\) are availablea. in analytical formb. at discrete values of \(t\)c. in the form of a complex equation
True or False.The Laplace transform method takes the initial conditions into account automatically.
Fill in the Blank.The variation of the maximum response with the natural frequency of a single-degree-of-freedom system is known as _____________ spectrum.
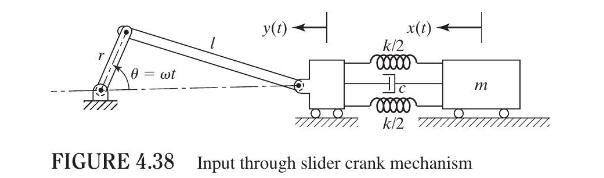
A slider-crank mechanism is used to impart motion to the base of a spring-mass-damper system, as shown in Fig. 4.38. Approximating the base motion \(y(t)\) as a series of harmonic functions, find the response of the mass for \(m=1 \mathrm{~kg}, c=10 \mathrm{~N}-\mathrm{s} / \mathrm{m}, k=100
What are the advantages of the Laplace transform method?
The response of a single-degree-of-freedom system under base excitation, \(y(t)\), can be determined by using the external force asa. \(-m \ddot{y}\)b. \(m \ddot{y}\)c. \(m \ddot{y}+c \dot{y}+k y\)
True or False.The equation of motion can be integrated numerically even when the exciting force is nonperiodic.
Fill in the Blank.The transient response of a system can be found using the ____________ integral.
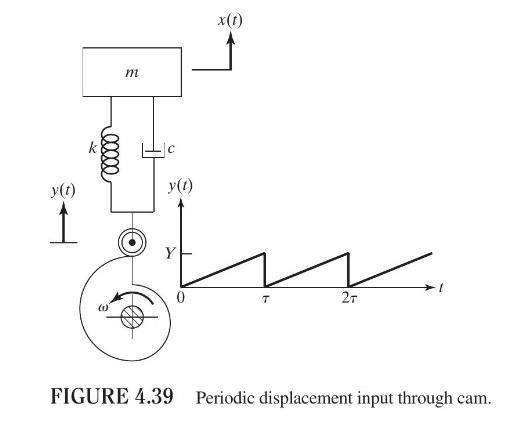
The base of a spring-mass-damper system is subjected to the periodic displacement shown in Fig. 4.39. Determine the response of the mass using the principle of superposition. y(t) 00000 m y(t) x(t) 0 T 2T FIGURE 4.39 Periodic displacement input through cam.
What is the use of a pseudo spectrum?
The response spectrum is widely used ina. building design under large live loadsb. earthquake designc. design of machinery under fatigue
True or False.The response spectrum gives the maximum response of all possible single-degree-of-freedom systems.
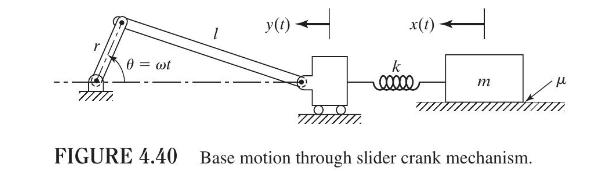
The base of a spring-mass system, with Coulomb damping, is connected to the slider-crank mechanism shown in Fig. 4.40. Determine the response of the system for a coefficient of friction \(\mu\) between the mass and the surface by approximating the motion \(y(t)\) as a series of harmonic functions
Fill in the Blank.The complete solution of a vibration problem is composed of the ___________ state and transient solutions.
How is the Laplace transform of a function \(x(t)\) defined?
The equation of motion of a system subjected to base excitation, \(y(t)\), is given bya. \(m \ddot{x}+c \dot{x}+k x=-m \ddot{y}\)b. \(m \ddot{z}+c \dot{z}+k z=-m \ddot{y} ; z=x-y\)c. \(m \ddot{x}+c \dot{x}+k x=-m \ddot{z} ; z=x-y\)
True or False.For a harmonic oscillator, the acceleration and displacement spectra can be obtained from the velocity spectrum.
Fill in the Blank.The Laplace transform method converts a differential equation into a(n)__________equation.
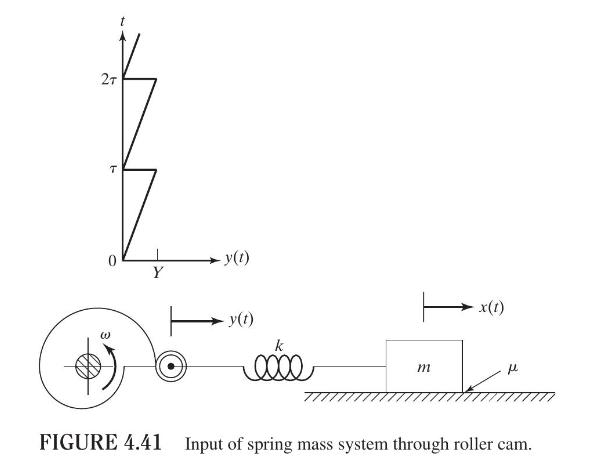
A roller cam is used to impart a periodic motion to the base of the spring-mass system shown in Fig. 4.41. If the coefficient of friction between the mass and the surface is \(\mu\), find the response of the system using the principle of superposition. Discuss the validity of the result. 2T T Y
Define the terms generalized impedance and admittance of a system.
The function \(e^{-s t}\) used in the Laplace transform is known asa. kernelb. integrandc. subsidiary term
True or False.If two masses \(m_{1}\) and \(m_{2}\) get attached to one another after a collision, it is called an elastic collision.
Fill in the Blank.The transfer function is the _________ of the generalized impedance.
Find the total response of a viscously damped single-degree-of-freedom system subjected to a harmonic base excitation for the following data: \(m=10 \mathrm{~kg}, c=20 \mathrm{~N}-\mathrm{s} / \mathrm{m}, k=4000 \mathrm{~N} / \mathrm{m}\), \(y(t)=0.05 \cos 5 t \mathrm{~m}, x_{0}=0.1 \mathrm{~m},
State the interpolation models that can be used for approximating an arbitrary forcing function.
The Laplace transform of \(x(t)\) is defined bya. \(\bar{x}(s)=\int_{0}^{\infty} e^{-s t} x(t) d t\)b. \(\bar{x}(s)=\int_{-\infty}^{\infty} e^{-s t} x(t) d t\)c. \(\bar{x}(s)=\int_{0}^{\infty} e^{s t} x(t) d t\)
True or False.The transient response characteristics can be found from the transfer function.
Showing 1700 - 1800
of 2655
First
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
Last
Step by Step Answers