New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
mechanical vibration analysis
Mechanical Vibrations 6th Edition Singiresu S Rao - Solutions
The rotor of a dial indicator is connected to a torsional spring and a torsional viscous damper to form a single-degree-of-freedom torsional system. The scale is graduated in equal divisions, and the equilibrium position of the rotor corresponds to zero on the scale. When a torque of \(2 \times
Determine the values of \(\zeta\) and \(\omega_{d}\) for the following viscously damped systems:a. \(m=10 \mathrm{~kg}, c=150 \mathrm{~N}-\mathrm{s} / \mathrm{m}, k=1000 \mathrm{~N} / \mathrm{m}\)b. \(m=10 \mathrm{~kg}, c=200 \mathrm{~N}-\mathrm{s} / \mathrm{m}, k=1000 \mathrm{~N} / \mathrm{m}\)c.
Determine the free-vibration response of the viscously damped systems described in Problem 2.149 when \(x_{0}=0.1 \mathrm{~m}\) and \(\dot{x}_{0}=10 \mathrm{~m} / \mathrm{s}\).Data From Problem 2.149:-Determine the values of \(\zeta\) and \(\omega_{d}\) for the following viscously damped systems:a.
Find the energy dissipated during a cycle of simple harmonic motion given by \(x(t)=0.2 \sin \omega_{d} t \mathrm{~m}\) by a viscously damped single-degree-of-freedom system with the following parameters:a. \(m=10 \mathrm{~kg}, c=50 \mathrm{~N}-\mathrm{s} / \mathrm{m}, k=1000 \mathrm{~N} /
The equation of motion of a spring-mass-damper system, with a hardening-type spring, is given by (in SI units)\[100 \ddot{x}+500 \dot{x}+10,000 x+400 x^{3}=0\]a. Determine the static equilibrium position of the system.b. Derive the linearized equation of motion for small displacements \((x)\) about
The equation of motion of a spring-mass-damper system, with a softening-type spring, is given by (in SI units)\[100 \ddot{x}+500 \dot{x}+10,000 x-400 x^{3}=0\]a. Determine the static equilibrium position of the system.b. Derive the linearized equation of motion for small displacements \((x)\) about
The needle indicator of an electronic instrument is connected to a torsional viscous damper and a torsional spring. If the rotary inertia of the needle indicator about its pivot point is \(25 \mathrm{~kg}-\mathrm{m}^{2}\) and the spring constant of the torsional spring is \(100
Find the responses of systems governed by the following equations of motion for the initial conditions \(x(0)=0, \dot{x}(0)=1\) :a. \(2 \ddot{x}+8 \dot{x}+16 x=0\)b. \(3 \ddot{x}+12 \dot{x}+9 x=0\)c. \(2 \ddot{x}+8 \dot{x}+8 x=0\)
Find the responses of systems governed by the following equations of motion for the initial conditions \(x(0)=1, \dot{x}(0)=0\) :a. \(2 \ddot{x}+8 \dot{x}+16 x=0\)b. \(3 \ddot{x}+12 \dot{x}+9 x=0\)c. \(2 \ddot{x}+8 \dot{x}+8 x=0\)
Find the responses of systems governed by the following equations of motion for the initial conditions \(x(0)=1, \dot{x}(0)=-1\) :a. \(2 \ddot{x}+8 \dot{x}+16 x=0\)b. \(3 \ddot{x}+12 \dot{x}+9 x=0\)c. \(2 \ddot{x}+8 \dot{x}+8 x=0\)
A spring-mass system is found to vibrate with a frequency of 120 cycles per minute in air and 100 cycles per minute in a liquid. Find the spring constant \(k\), the damping constant \(c\), and the damping ratio \(\zeta\) when vibrating in the liquid. Assume \(m=10 \mathrm{~kg}\).
Find the frequency of oscillation and time constant for the systems governed by the following equations:a. \(\ddot{x}+2 \dot{x}+9 x=0\)b. \(\ddot{x}+8 \dot{x}+9 x=0\)c. \(\ddot{x}+6 \dot{x}+9 x=0\)
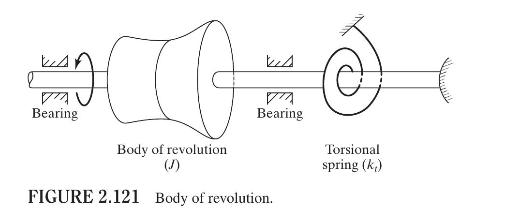
The mass moment of inertia of a nonhomogeneous and/or complex-shaped body of revolution about the axis of rotation can be determined by first finding its natural frequency of torsional vibration about its axis of rotation. In the torsional system shown in Fig. 2.121, the body of revolution (or
A damped system has the following parameters: \(m=2 \mathrm{~kg}, c=3 \mathrm{~N}-\mathrm{s} / \mathrm{m}\), and \(k=40 \mathrm{~N} / \mathrm{m}\). Determine the natural frequency, damping ratio, and the type of response of the system in free vibration. Find the amount of damping to be added or
The response of a damped single-degree-of-freedom system is given byDetermine the natural frequency, damping constant, initial displacement, and initial velocity of the system. x(t) = 0.05 e 10+10.5te-10 m (E.1)
The characteristic roots of a single-degree-of-freedom system are given below. Find all the applicable features of the system among the characteristic equation, time constant, undamped natural frequency, damped frequency, and damping ratio.a. \(s_{1,2}=-4 \pm 5 i\)b. \(s_{1,2}=4 \pm 5 i\)c.
Show the characteristic roots indicated in Problem 2.163 (a)-(d) in the \(s\)-plane and describe the nature of the response of the system in each case.Data From Problem 2.163:-The characteristic roots of a single-degree-of-freedom system are given below. Find all the applicable features of the
The characteristic equation of a single-degree-of-freedom system, given by Eq. (2.107), can be rewritten aswhere \(a=c / m\) and \(b=k / m\) can be considered as the parameters of the system. Identify regions that represent a stable, unstable, and marginally stable system in the parameter
Consider the characteristic equation: \(2 s^{2}+c s+18=0\). Draw the root locus of the system for \(c \geq 0\).
Consider the characteristic equation: \(2 s^{2}+12 s+k=0\). Draw the root locus of the system for \(k \geq 0\).
Consider the characteristic equation: \(m s^{2}+12 s+4=0\). Draw the root locus of the system for \(m \geq 0\).
A single-degree-of-freedom system consists of a mass of \(20 \mathrm{~kg}\) and a spring of stiffness \(4000 \mathrm{~N} / \mathrm{m}\). The amplitudes of successive cycles are found to be \(50,45,40,35, \ldots \mathrm{mm}\). Determine the nature and magnitude of the damping force and the frequency
A mass of \(20 \mathrm{~kg}\) slides back and forth on a dry surface due to the action of a spring having a stiffness of \(10 \mathrm{~N} / \mathrm{mm}\). After four complete cycles, the amplitude has been found to be \(100 \mathrm{~mm}\). What is the average coefficient of friction between the two
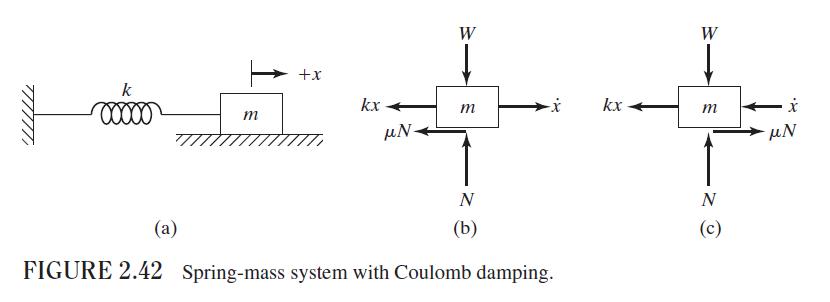
A 10-kg mass is connected to a spring of stiffness \(3000 \mathrm{~N} / \mathrm{m}\) and is released after giving an initial displacement of \(100 \mathrm{~mm}\). Assuming that the mass moves on a horizontal surface, as shown in Fig. 2.42(a), determine the position at which the mass comes to rest.
A weight of \(25 \mathrm{~N}\) is suspended from a spring that has a stiffness of \(1000 \mathrm{~N} / \mathrm{m}\). The weight vibrates in the vertical direction under a constant damping force. When the weight is initially pulled downward a distance of \(10 \mathrm{~cm}\) from its static
A mass of \(20 \mathrm{~kg}\) is suspended from a spring of stiffness \(10,000 \mathrm{~N} / \mathrm{m}\). The vertical motion of the mass is subject to Coulomb friction of magnitude \(50 \mathrm{~N}\). If the spring is initially displaced downward by \(5 \mathrm{~cm}\) from its static equilibrium
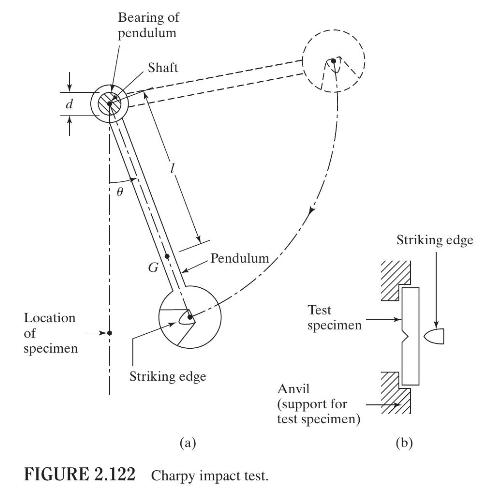
The Charpy impact test is a dynamic test in which a specimen is struck and broken by a pendulum (or hammer) and the energy absorbed in breaking the specimen is measured. The energy values serve as a useful guide for comparing the impact strengths of different materials. As shown in Fig. 2.122, the
Find the equivalent viscous-damping constant for Coulomb damping for sinusoidal vibration.
A single-degree-of-freedom system consists of a mass, a spring, and a damper in which both dry friction and viscous damping act simultaneously. The free-vibration amplitude is found to decrease by \(1 \%\) per cycle when the amplitude is \(20 \mathrm{~mm}\) and by \(2 \%\) per cycle when the
A metal block, placed on a rough surface, is attached to a spring and is given an initial displacement of \(10 \mathrm{~cm}\) from its equilibrium position. It is found that the natural time period of motion is \(1.0 \mathrm{~s}\) and that the amplitude reduces by \(0.5 \mathrm{~cm}\) in each
The mass of a spring-mass system with \(k=10,000 \mathrm{~N} / \mathrm{m}\) and \(m=5 \mathrm{~kg}\) is made to vibrate on a rough surface. If the friction force is \(F=20 \mathrm{~N}\) and the amplitude of the mass is observed to decrease by \(50 \mathrm{~mm}\) in 10 cycles, determine the time
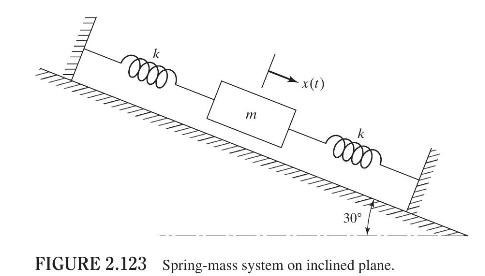
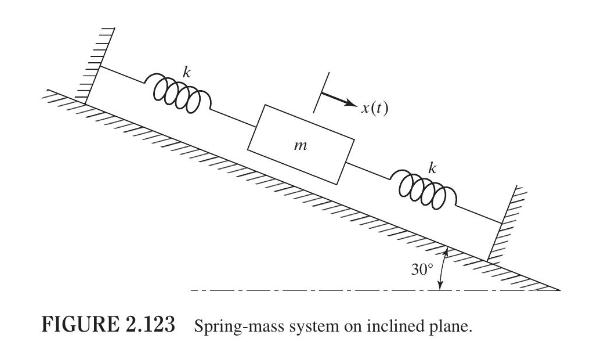
The mass of a spring-mass system vibrates on a dry surface inclined at \(30^{\circ}\) to the horizontal as shown in Fig. 2.123.a. Derive the equation of motion.b. Find the response of the system for the following data:\[m=20 \mathrm{~kg}, \quad k=1000 \mathrm{~N} / \mathrm{m}, \quad \mu=0.1, \quad
The mass of a spring-mass system is initially displaced by \(10 \mathrm{~cm}\) from its unstressed position by applying a force of \(25 \mathrm{~N}\), which is equal to five times the weight of the mass. If the mass is released from this position, how long will the mass vibrate and at what distance
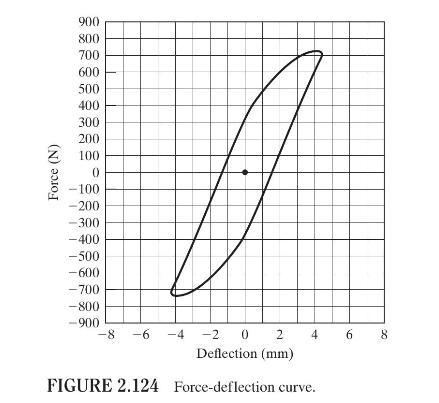
The experimentally observed force-deflection curve for a composite structure is shown in Fig. 2.124. Find the hysteresis damping constant, the logarithmic decrement, and the equivalent viscous-damping ratio corresponding to this curve. Force (N) 900 800 700 600 500 400 300 200 100 0 -100 -200 -300
A panel made of fiber-reinforced composite material is observed to behave as a single-degreeof-freedom system of mass \(1 \mathrm{~kg}\) and stiffness \(2 \mathrm{~N} / \mathrm{m}\). The ratio of successive amplitudes is found to be 1.1. Determine the value of the hysteresis-damping constant
A built-up cantilever beam having a bending stiffness of \(200 \mathrm{~N} / \mathrm{m}\) supports a mass of \(2 \mathrm{~kg}\) at its free end. The mass is displaced initially by \(30 \mathrm{~mm}\) and released. If the amplitude is found to be \(20 \mathrm{~mm}\) after 100 cycles of motion,
A mass of \(5 \mathrm{~kg}\) is attached to the top of a helical spring, and the system is made to vibrate by giving to the mass an initial deflection of \(25 \mathrm{~mm}\). The amplitude of the mass is found to reduce to \(10 \mathrm{~mm}\) after 100 cycles of vibration. Assuming a spring rate of
Consider the equation of motion of a simple pendulum:a. Linearize Eq. (E.1) about an arbitrary angular displacement \(\theta_{0}\) of the pendulum.b. Investigate the stability of the pendulum about \(\theta_{0}=0\) and \(\theta_{0}=\pi\) using the linearized equation of motion. 0 + sin 0 = = 0 (E.1)
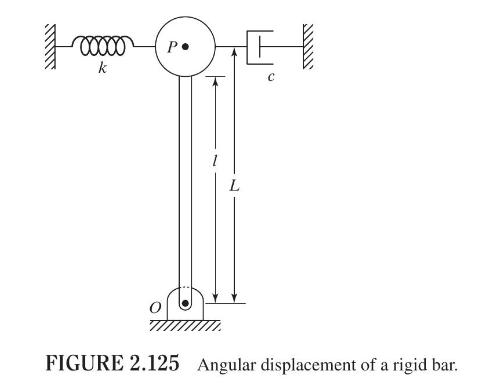
Figure 2.125 shows a uniform rigid bar of mass \(m\) and length \(l\), pivoted at one end (point \(O\) ) and carrying a circular disk of mass \(M\) and mass moment of inertia \(J\) (about its rotational axis) at the other end (point \(P\) ). The circular disk is connected to a spring of stiffness
Find the free-vibration response of a spring-mass system subject to Coulomb damping using MATLAB for the following data:\[m=5 \mathrm{~kg}, \quad k=100 \mathrm{~N} / \mathrm{m}, \quad \mu=0.5, \quad x_{0}=0.4 \mathrm{~m}, \quad \dot{x}_{0}=0\]
Plot the response of a critically damped system (Eq. 2.80) for the following data using MATLAB:a. \(x_{0}=10 \mathrm{~mm}, 50 \mathrm{~mm}, 100 \mathrm{~mm} ; \dot{x}_{0}=0, \omega_{n}=10 \mathrm{rad} / \mathrm{s}\).b. \(x_{0}=0, \dot{x}_{0}=10 \mathrm{~mm} / \mathrm{s}, 50 \mathrm{~mm} /
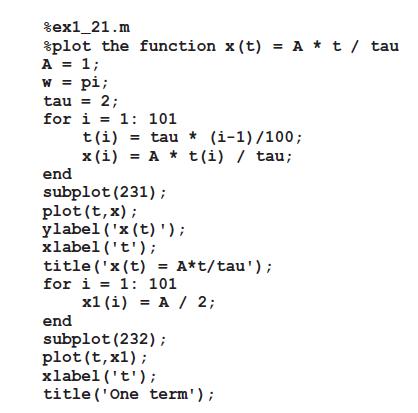
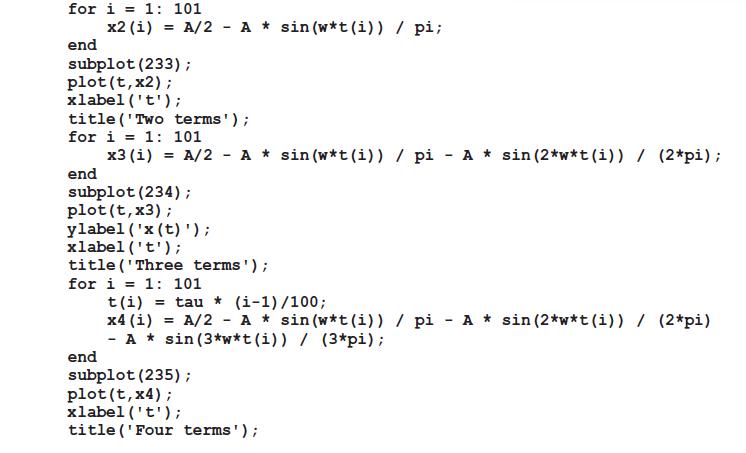
Plot Eq. (2.81) as well as each of the two terms of Eq. (2.81) as functions of \(t\) using MATLAB for the following data:\[\omega_{n}=10 \mathrm{rad} / \mathrm{s}, \quad \zeta=2.0, \quad x_{0}=20 \mathrm{~mm}, \quad \dot{x}_{0}=50 \mathrm{~mm} / \mathrm{s}\]Equation 2.81:- x(t) = Ce(5+g1)wnt +
Using the MATLAB Program 2.m, plot the free-vibration response of a viscously damped system with \(m=4 \mathrm{~kg}, k=2500 \mathrm{~N} / \mathrm{m}, x_{0}=100 \mathrm{~mm}, \dot{x}_{0}=-10 \mathrm{~m} / \mathrm{s}, \Delta t=0.01 \mathrm{~s}, n=50\) for the following values of the damping
Using the MATLAB Program 2.m, plot the free-vibration response of a viscously damped system with \(m=4 \mathrm{~kg}, k=2500 \mathrm{~N} / \mathrm{m}, x_{0}=100 \mathrm{~mm}, \dot{x}_{0}=-10 \mathrm{~m} / \mathrm{s}, \Delta t=0.01 \mathrm{~s}, n=50\) for the following values of the damping
Using the MATLAB Program 2.m, plot the free-vibration response of a viscously damped system with \(m=4 \mathrm{~kg}, k=2500 \mathrm{~N} / \mathrm{m}, x_{0}=100 \mathrm{~mm}, \dot{x}_{0}=-10 \mathrm{~m} / \mathrm{s}, \Delta t=0.01 \mathrm{~s}, n=50\) for the following values of the damping
Using the MATLAB Program 2.m, plot the free-vibration response of a viscously damped system with \(m=4 \mathrm{~kg}, k=2500 \mathrm{~N} / \mathrm{m}, x_{0}=100 \mathrm{~mm}, \dot{x}_{0}=-10 \mathrm{~m} / \mathrm{s}, \Delta t=0.01 \mathrm{~s}, n=50\) for the following values of the damping
Find the response of the system described in Problem 2.179 using MATLAB.Data From Problem 2.179:-The mass of a spring-mass system vibrates on a dry surface inclined at \(30^{\circ}\) to the horizontal as shown in Fig. 2.123.a. Derive the equation of motion.b. Find the response of the system for the
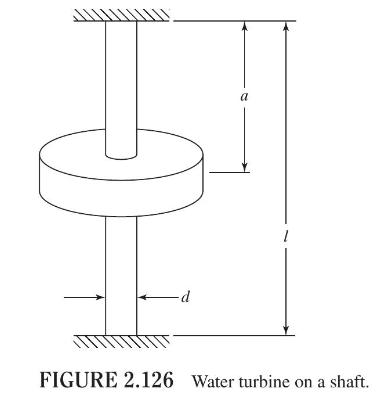
A water turbine of mass \(1000 \mathrm{~kg}\) and mass moment of inertia \(500 \mathrm{~kg}-\mathrm{m}^{2}\) is mounted on a steel shaft, as shown in Fig. 2.126. The operational speed of the turbine is \(2400 \mathrm{rpm}\). Assuming the ends of the shaft to be fixed, find the values of \(l, a\),
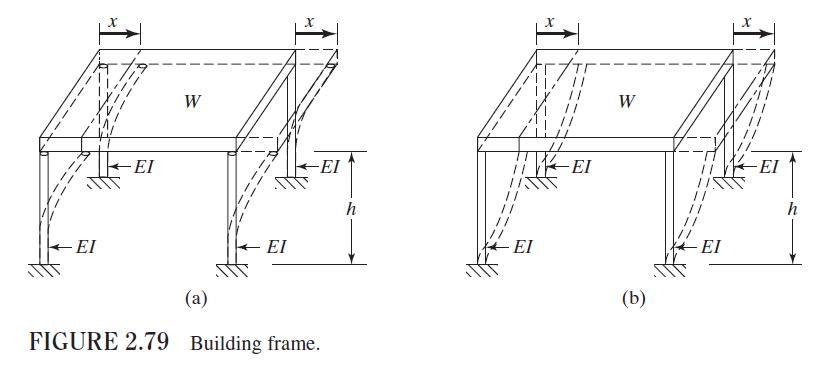
Design the columns for each of the building frames shown in Figs. 2.79 (a) and (b) for minimum weight such that the natural frequency of vibration is greater than \(50 \mathrm{~Hz}\). The mass of the floor \((m)\) is \(2000 \mathrm{~kg}\) and the length of the columns \((l)\) is \(2.5
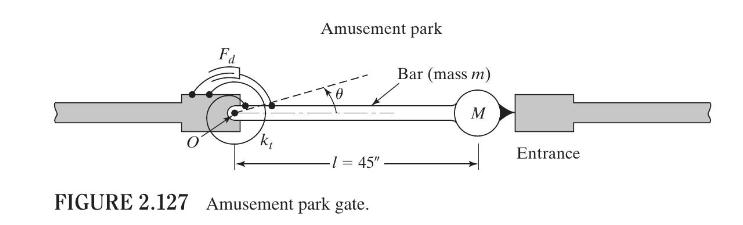
One end of a uniform rigid bar of mass \(m\) is connected to a wall by a hinge joint \(O\), and the other end carries a concentrated mass \(M\), as shown in Fig. 2.127. The bar rotates about the hinge point \(O\) against a torsional spring and a torsional damper. It is proposed to use
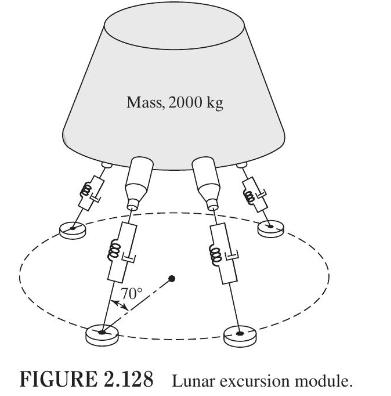
The lunar excursion module has been modeled as a mass supported by four symmetrically located legs, each of which can be approximated as a spring-damper system with negligible mass (see Fig. 2.128). Design the springs and dampers of the system in order to have the damped period of vibration between
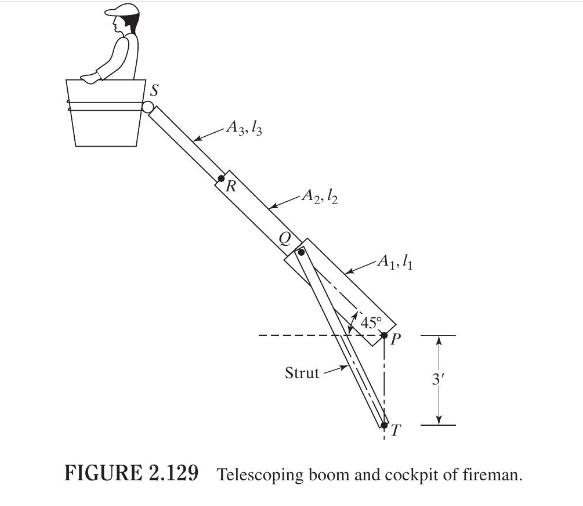
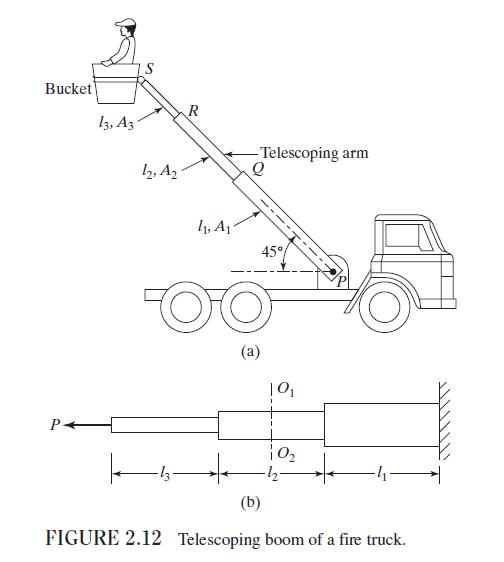
Consider the telescoping boom and cockpit of the firetruck shown in Fig. 2.12(a). Assume that the telescoping boom \(P Q R S\) is supported by a strut \(Q T\), as shown in Fig. 2.129. Determine the cross section of the strut \(Q T\) so that the natural time period of vibration of the cockpit with
How are the amplitude, frequency, and phase of a steady-state vibration related to those of the applied harmonic force for an undamped system?
Explain why a constant force on the vibrating mass has no effect on the steady-state vibration.
Define the term magnification factor. How is the magnification factor related to the frequency ratio?
What will be the frequency of the applied force with respect to the natural frequency of the system if the magnification factor is less than unity?
What are the amplitude and the phase angle of the response of a viscously damped system in the neighborhood of resonance?
Is the phase angle corresponding to the peak amplitude of a viscously damped system ever larger than \(90^{\circ}\) ?
Why is damping considered only in the neighborhood of resonance in most cases?
Show the various terms in the forced equation of motion of a viscously damped system in a vector diagram.
What happens to the response of an undamped system at resonance?
Define the following terms: beating, quality factor, transmissibility, complex stiffness, quadratic damping.
Give a physical explanation of why the magnification factor is nearly equal to 1 for small values of \(r\) and is small for large values of \(r\).
Will the force transmitted to the base of a spring-mounted machine decrease with the addition of damping?
How does the force transmitted to the base change as the speed of the machine increases?
If a vehicle vibrates badly while moving on a uniformly bumpy road, will a change in the speed improve the condition?
Is it possible to find the maximum amplitude of a damped forced vibration for any value of \(r\) by equating the energy dissipated by damping to the work done by the external force?
What assumptions are made about the motion of a forced vibration with nonviscous damping in finding the amplitude?
Is it possible to find the approximate value of the amplitude of a damped forced vibration without considering damping at all? If so, under what circumstances?
Is dry friction effective in limiting the reasonant amplitude?
How do you find the response of a viscously damped system under rotating unbalance?
What is the frequency of the response of a viscously damped system when the external force is \(F_{0} \sin \omega t\) ? Is this response harmonic?
What is the difference between the peak amplitude and the resonant amplitude?
Why is viscous damping used in most cases rather than other types of damping?
What is self-excited vibration?
How is transfer function defined?
How can we generate the frequency transfer function from the general transfer function?
What is a Bode diagram?
How is decibel defined?
True or False.The magnification factor is the ratio of maximum amplitude and static deflection.
True or False.The response will be harmonic if excitation is harmonic.
True or False.The phase angle of the response depends on the system parameters \(m, c, k\), and \(\omega\).
True or False.The phase angle of the response depends on the amplitude of the forcing function.
True or False.During beating, the amplitude of the response builds up and then diminishes in a regular pattern.
True or False.The \(Q\)-factor can be used to estimate the damping in a system.
True or False.The half-power points denote the values of frequency ratio where the amplification factor falls to \(Q / \sqrt{2}\), where \(Q\) is the \(Q\) factor.
True or False.The amplitude ratio attains its maximum value at resonance in the case of viscous damping.
True or False.The response is always in phase with the harmonic forcing function in the case of hysteresis damping.
True or False.Damping reduces the amplitude ratio for all values of the forcing frequency.
True or False.The unbalance in a rotating machine causes vibration.
True or False.The steady-state solution can be assumed to be harmonic for small values of dry-friction force.
True or False.In a system with rotational unbalance, the effect of damping becomes negligibly small at higher speeds.
True or False.The transfer function is a property of the system and is not related to the input.
True or False.The transfer functions of several different systems can be same.
True or False.If the transfer function of a system is known, the system response can be found for all types of input.
Fill in the Blank.The excitation can be ___________ , periodic, nonperiodic, or random in nature.
Fill in the Blank.The response of a system to a harmonic excitation is called ___________ response.
Fill in the Blank.The response of a system to suddenly applied nonperiodic excitation is called ___________ response.
Fill in the Blank.When the frequency of excitation coincides with the natural frequency of the system, the condition is known as ___________ .
Fill in the Blank.The magnification factor is also known as ___________ factor.
Showing 2200 - 2300
of 2655
First
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Step by Step Answers