New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
mechanical vibration analysis
Mechanical Vibrations 6th Edition Singiresu S Rao - Solutions
How can we make a system vibrate in one of its natural modes?
What is a degenerate system? Give two examples of physical systems that are degenerate.
How many degenerate modes can a vibrating system have?
What is the difference between a general transfer function and a frequency transfer function?
How many natural frequencies can be zero for an unrestrained two-degree-of-freedom system?
True or False.The normal modes can also be called principal modes.
True or False.The generalized coordinates are linearly dependent.
True or False.Principal coordinates can be considered as generalized coordinates.
True or False.The vibration of a system depends on the coordinate system.
True or False.The nature of coupling depends on the coordinate system.
True or False.The principal coordinates avoid both static and dynamic coupling.
True or False.The use of principal coordinates helps in finding the response of the system.
True or False.The mass, stiffness, and damping matrices of a two-degree-of-freedom system are symmetric.
True or False.The characteristics of a two-degree-of-freedom system are used in the design of dynamic vibration absorber.
True or False.Semidefinite systems are also known as degenerate systems.
True or False.A semidefinite system cannot have nonzero natural frequencies.
True or False.The generalized coordinates are always measured from the equilibrium position of the body.
True or False.During free vibration, different degrees of freedom oscillate with different phase angles.
True or False.During free vibration, different degrees of freedom oscillate at different frequencies.
True or False.During free vibration, different degrees of freedom oscillate with different amplitudes.
True or False.The relative amplitudes of different degrees of freedom in a two-degree-of-freedom system depend on the natural frequency.
True or False.The modal vectors of a system denote the normal modes of vibration.
True or False.The characteristic polynomial of a two-degree-of-freedom undamped system will be a quadratic in \(s^{2}\).
True or False.The characteristic polynomial of a two-degree-of-freedom damped system can be a quadratic in \(s^{2}\).
True or False.The equations of motion of a two-degree-of-freedom system can be expressed in terms of the displacement of either of the two masses.
Fill in the Blank.The free vibration of a two-degree-of-freedom system under arbitrary initial excitation can be found by superposing the two __________ modes of vibration.
Fill in the Blank.The motion of a two-degree-of-freedom system is described by two __________ coordinates.
Fill in the Blank.When the forcing frequency is equal to one of the natural frequencies of the system, a phenomenon known as __________ occurs.
Fill in the Blank.The amplitudes and phase angles are determined from the __________ conditions of the system.
Fill in the Blank.For a torsional system, __________ and __________ are analogous to the masses and linear springs, respectively, of a mass-spring system.
Fill in the Blank.The use of different generalized coordinates lead to different types of __________ .
Fill in the Blank.A semidefinite system has at least one __________ body motion.
Fill in the Blank.The elastic coupling is also known as __________.
Fill in the Blank.The inertia coupling is also known as __________ coupling.
Fill in the Blank.The damping coupling is also known as __________ coupling.
Fill in the Blank.The equations of motion of a system will be __________ when principal coordinates are used.
Fill in the Blank.The Routh-Hurwitz criterion can be used to investigate the __________ of a system.
Fill in the Blank.The equations of motion of a two-degree-of-freedom system are uncoupled only when the two masses are not __________ connected.
Fill in the Blank.The vibration of a system under initial conditions only is called __________ vibration.
Fill in the Blank.The vibration of a system under external forces is called __________ vibration.
Fill in the Blank.The order of a system is same as the order of the __________ polynomial of the system.
Fill in the Blank.The response of an unrestrained system is composed of rigid-body motion and __________ motion.
When a two-degree-of-freedom system is subjected to a harmonic force, the system vibrates at thea. frequency of applied forceb. smaller natural frequencyc. larger natural frequency
The number of degrees of freedom of a vibrating system depends ona. number of massesb. number of masses and degrees of freedom of each massc. number of coordinates used to describe the position of each mass
A two-degree-of-freedom system hasa. one normal modeb. two normal modesc. many normal modes
The equations of motion of a two-degree-of-freedom system are in generala. coupledb. uncoupledc. linear
Mechanical impedance \(Z_{r s}(i \omega)\) isa. \(\left[m_{r s} \ddot{\vec{x}}+\left[c_{r s} \dot{\vec{x}}+\left[k_{r s}\right] \vec{x}\right.\right.\)b. \(\left\{\begin{array}{l}X_{r}(i \omega) \\ X_{s}(i \omega)\end{array}\right\}\)c. \(-\omega^{2} m_{r s}+i \omega c_{r s}+k_{r s}\)
The impedance matrix, \([Z(i \omega)]\), can be used to find the solution asa. \(\vec{X}=[Z(i \omega)]^{-1} \vec{F} 0\)b. \(\vec{X}=[Z(i \omega)] \vec{F} 0\)c. \(\vec{X}=[Z(i \omega)] \vec{X} 0\)
The configuration of a system vibrating at one of its natural frequencies is calleda. natural modeb. natural frequencyc. solution
The equations of motion of a two-degree-of-freedom system are in general in the form ofa. coupled algebraic equationsb. coupled differential equationsc. uncoupled equations
Static couplinga. Only the mass matrix is nondiagonalb. The mass and damping matrices are nondiagonalc. Only the stiffness matrix is nondiagonald. Only the damping matrix is nondiagonal
Inertial couplinga. Only the mass matrix is nondiagonalb. The mass and damping matrices are nondiagonalc. Only the stiffness matrix is nondiagonald. Only the damping matrix is nondiagonal
Velocity couplinga. Only the mass matrix is nondiagonalb. The mass and damping matrices are nondiagonalc. Only the stiffness matrix is nondiagonald. Only the damping matrix is nondiagonal
Dynamic couplinga. Only the mass matrix is nondiagonalb. The mass and damping matrices are nondiagonalc. Only the stiffness matrix is nondiagonald. Only the damping matrix is nondiagonal
Match the data given in the left column with the frequency equations given in the right column for a two-degree-of-freedom system governed by the equations of motion:\[\begin{aligned}& J_{0} \ddot{\theta}_{1}-2 k_{t} \theta_{1}-k_{t} \theta_{2}=0 \\& 2 J_{0} \ddot{\theta}_{2}-k_{t} \theta_{1}+k_{t}
Match the data given in the left column with the frequency equations given in the right column for a two-degree-of-freedom system governed by the equations of motion:\[\begin{aligned}& J_{0} \ddot{\theta}_{1}-2 k_{t} \theta_{1}-k_{t} \theta_{2}=0 \\& 2 J_{0} \ddot{\theta}_{2}-k_{t} \theta_{1}+k_{t}
Match the data given in the left column with the frequency equations given in the right column for a two-degree-of-freedom system governed by the equations of motion:\[\begin{aligned}& J_{0} \ddot{\theta}_{1}-2 k_{t} \theta_{1}-k_{t} \theta_{2}=0 \\& 2 J_{0} \ddot{\theta}_{2}-k_{t} \theta_{1}+k_{t}
Match the data given in the left column with the frequency equations given in the right column for a two-degree-of-freedom system governed by the equations of motion:\[\begin{aligned}& J_{0} \ddot{\theta}_{1}-2 k_{t} \theta_{1}-k_{t} \theta_{2}=0 \\& 2 J_{0} \ddot{\theta}_{2}-k_{t} \theta_{1}+k_{t}
Match the data given in the left column with the frequency equations given in the right column for a two-degree-of-freedom system governed by the equations of motion:\[\begin{aligned}& J_{0} \ddot{\theta}_{1}-2 k_{t} \theta_{1}-k_{t} \theta_{2}=0 \\& 2 J_{0} \ddot{\theta}_{2}-k_{t} \theta_{1}+k_{t}
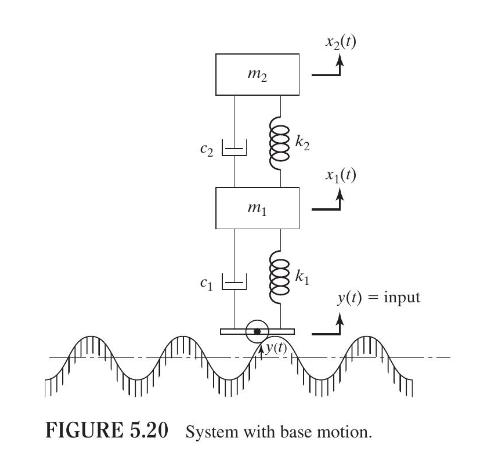
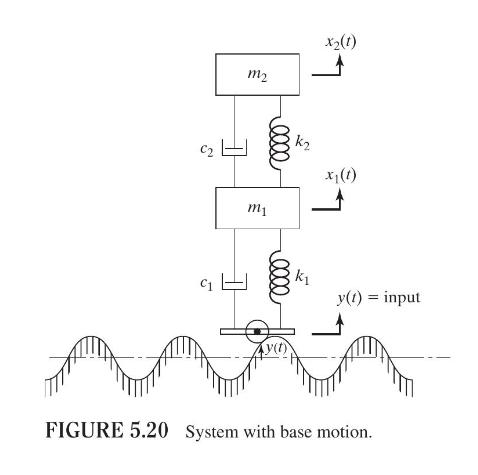
Derive the equations of motion of the system shown in Fig. 5.20. C m2 x2(1) m1 k2 x(1) elle y(t) k1 y(t) = input FIGURE 5.20 System with base motion.
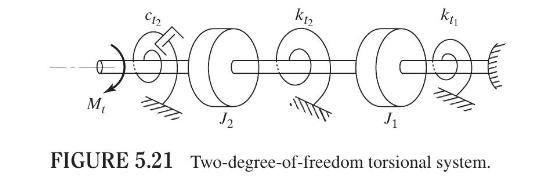
Derive the equations of motion of the system shown in Fig. 5.21. C m2 x2(1) m1 k2 x(1) elle y(t) k1 y(t) = input FIGURE 5.20 System with base motion.
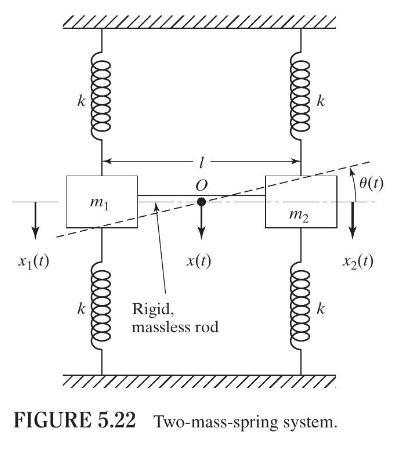
Two masses \(m_{1}\) and \(m_{2}\), each connected by two springs of stiffness \(k\), are connected by a rigid massless horizontal rod of length \(l\) as shown in Fig. 5.22. (a) Derive the equations of motion of the system in terms of the vertical displacement of the C.G. of the system, \(x(t)\),
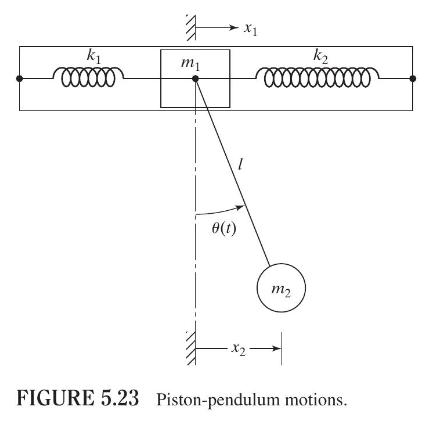
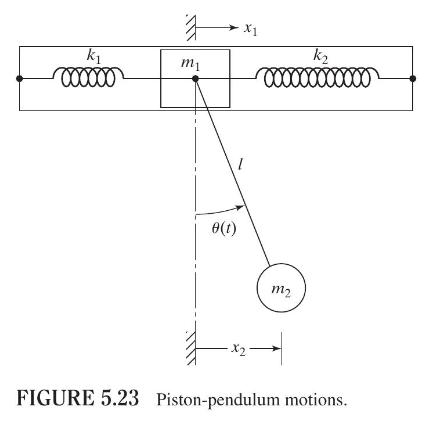
A two-mass system consists of a piston of mass \(m_{1}\), connected by two elastic springs, that moves inside a tube as shown in Fig. 5.23. A pendulum of length \(l\) and end mass \(m_{2}\) is connected to the piston as shown in Fig. 5.23. (a) Derive the equations of motion of the system in terms
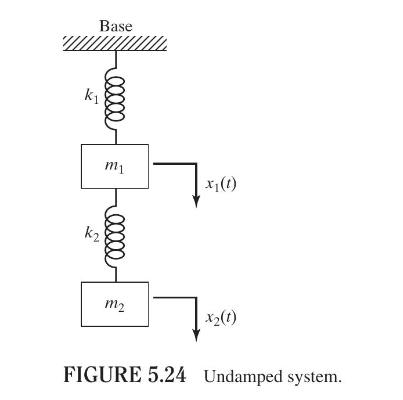
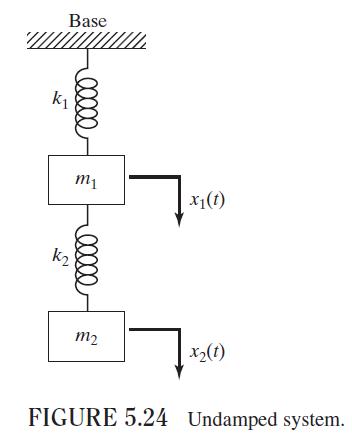
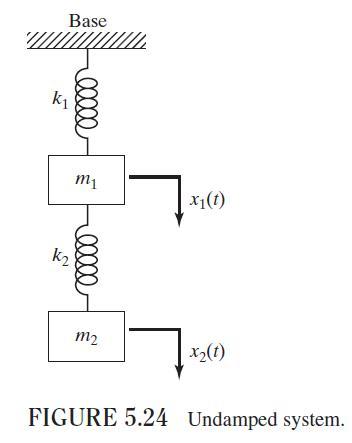
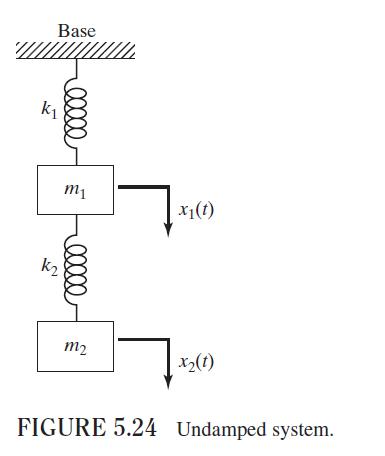
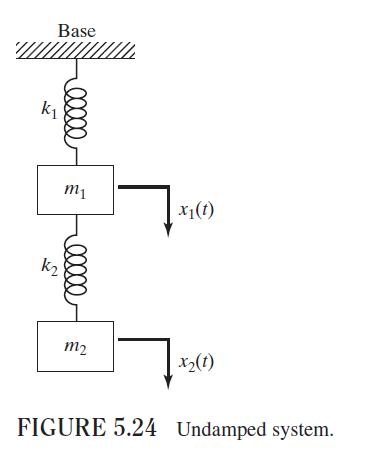
Find the natural frequencies of the system shown in Fig. 5.24, with \(m_{1}=m, m_{2}=2 m\), \(k_{1}=k\), and \(k_{2}=2 k\). Determine the response of the system when \(k=1000 \mathrm{~N} / \mathrm{m}, m=20 \mathrm{~kg}\), and the initial values of the displacements of the masses \(m_{1}\) and
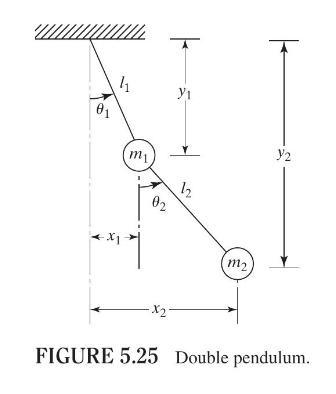
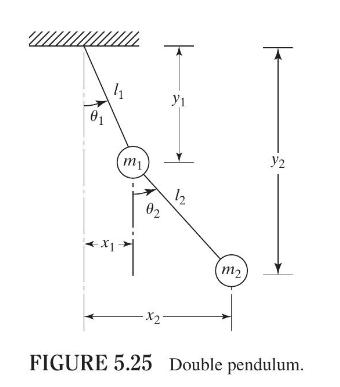
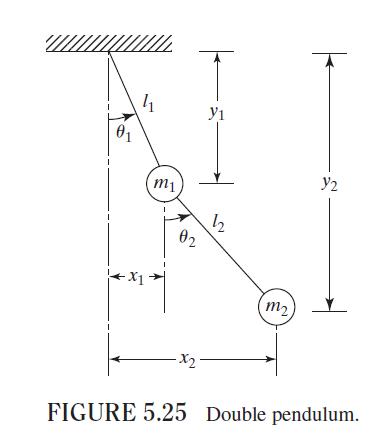
Set up the differential equations of motion for the double pendulum shown in Fig. 5.25, using the coordinates \(x_{1}\) and \(x_{2}\) and assuming small amplitudes. Find the natural frequencies, the ratios of amplitudes, and the locations of nodes for the two modes of vibration when
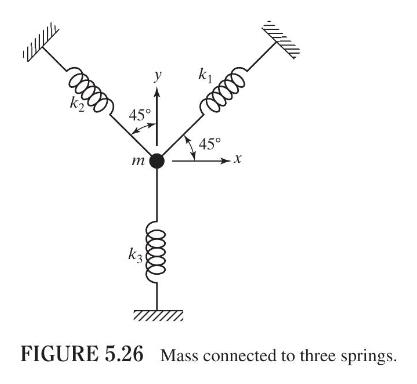
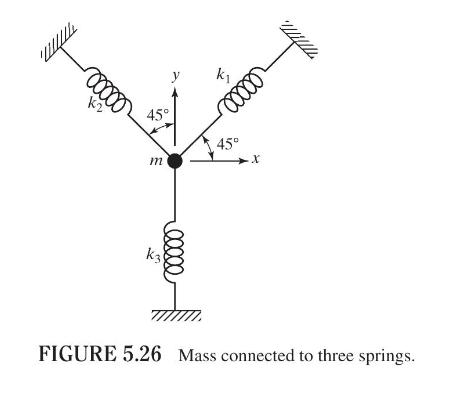
Determine the natural modes of the system shown in Fig. 5.26 when \(k_{1}=k_{2}=k_{3}=k\). 00000 K2 kz 00000 45 m 45 00000 x FIGURE 5.26 Mass connected to three springs.
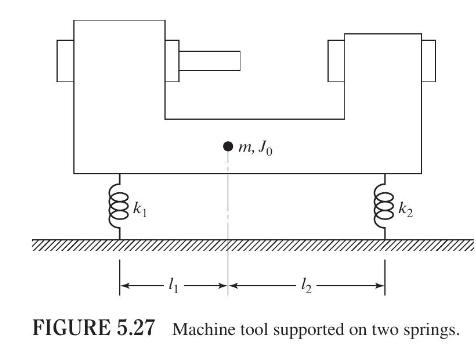
A machine tool, having a mass of \(m=1000 \mathrm{~kg}\) and a mass moment of inertia of \(J_{0}=300 \mathrm{~kg}-\mathrm{m}^{2}\), is supported on elastic supports, as shown in Fig. 5.27. If the stiffnesses of the supports are given by \(k_{1}=3000 \mathrm{~N} / \mathrm{mm}\) and \(k_{2}=2000
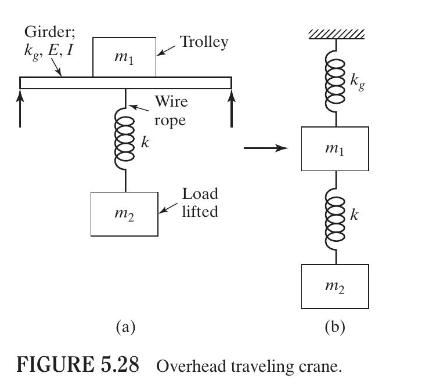
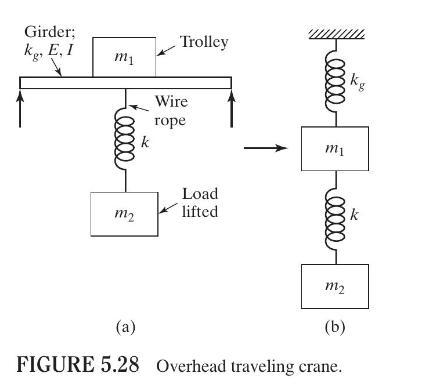
An electric overhead traveling crane, consisting of a girder, trolley, and wire rope, is shown in Fig. 5.28. The girder has a flexural rigidity \((E I)\) of \(17 \times 10^{9} \mathrm{~N}-\mathrm{m}^{2}\) and a span \((L)\) of \(10 \mathrm{~m}\). The rope is made of steel and has a length \((l)\)
An overhead traveling crane can be modeled as indicated in Fig. 5.28. Assuming that the girder has a span of \(40 \mathrm{~m}\), an area moment of inertia \((I)\) of \(0.02 \mathrm{~m}^{4}\), and a modulus of elasticity \((E)\) of \(2.06 \times 10^{11} \mathrm{~N} / \mathrm{m}^{2}\), the trolley
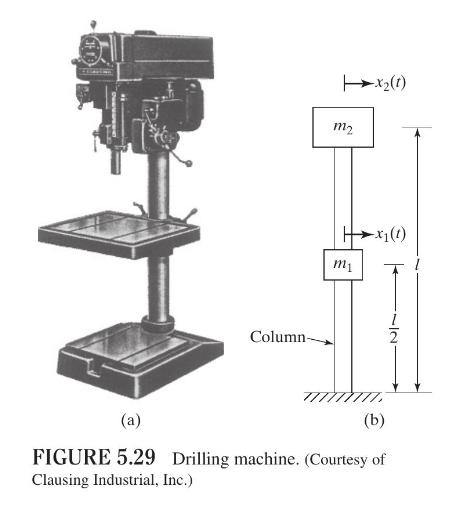
The drilling machine shown in Fig. 5.29 (a) can be modeled as a two-degree-of-freedom system as indicated in Fig. 5.29(b). Since a transverse force applied to mass \(m_{1}\) or mass \(m_{2}\) causes both the masses to deflect, the system exhibits elastic coupling. The bending stiffnesses of the
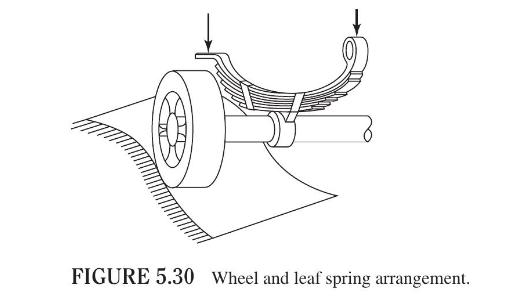
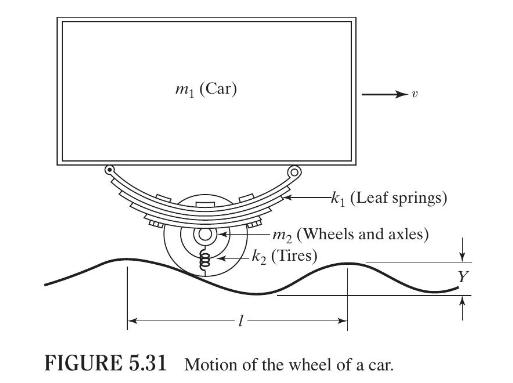
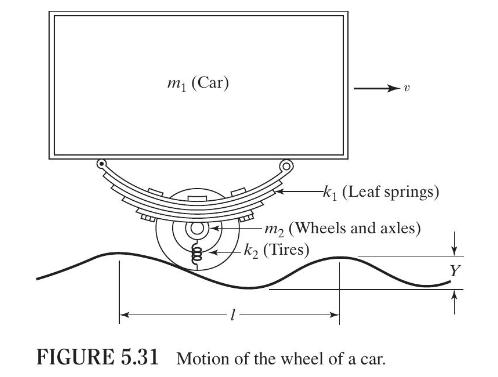
One of the wheels and leaf springs of a car, traveling over a rough road, is shown in Fig. 5.30. For simplicity, all the wheels can be assumed to be identical and the system can be idealized as shown in Fig. 5.31. The car has a mass of \(m_{1}=1000 \mathrm{~kg}\) and the leaf springs have a total
Derive the equations of motion of the double pendulum shown in Fig. 5.25, using the coordinates \(\theta_{1}\) and \(\theta_{2}\). Also find the natural frequencies and mode shapes of the system for \(m_{1}=m_{2}=m\) and \(l_{1}=l_{2}=l\).Figure 5.25:- 01 41 T 1 X1 m1 02 12 Y2 -x2- m2) FIGURE 5.25
Find the natural frequencies and mode shapes of the system shown in Fig. 5.24 for \(m_{1}=m_{2}=m\) and \(k_{1}=k_{2}=k\). Base k m1 x1(t) k 00000 m2 x2(t) FIGURE 5.24 Undamped system.
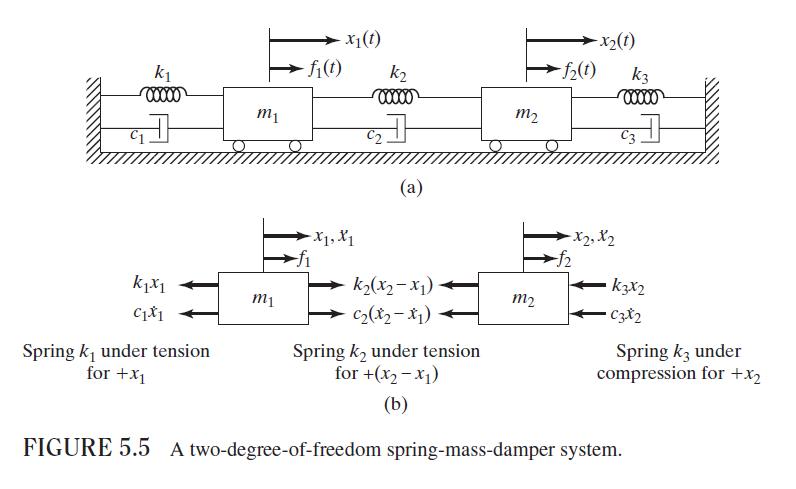
The normal modes of a two-degree-of-freedom system are orthogonal if \(X^{(1)^{T}}[m] \vec{X}^{(2)}=0\). Prove that the mode shapes of the system shown in Fig. 5.5 (a) are orthogonal.Figure 5.5:- k1 00000 m1 kx1 m1 C1x1 Spring k under tension for +1 fi(t) x1(t) k2 (a) -X1, X1 k2(x-x1) C2(x-x1)
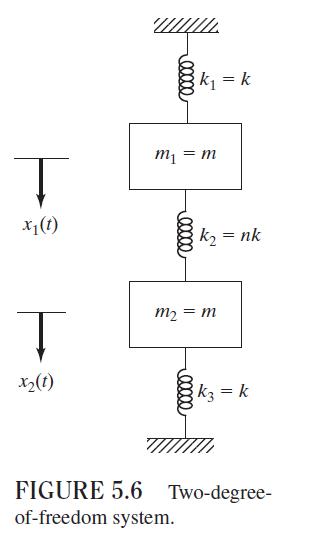
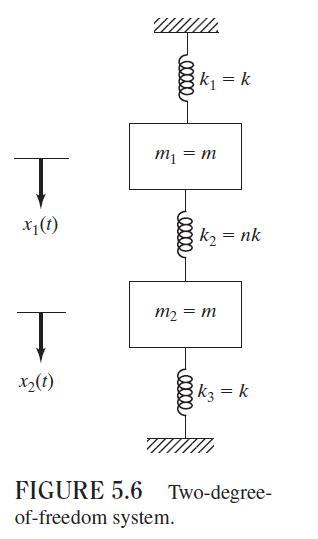
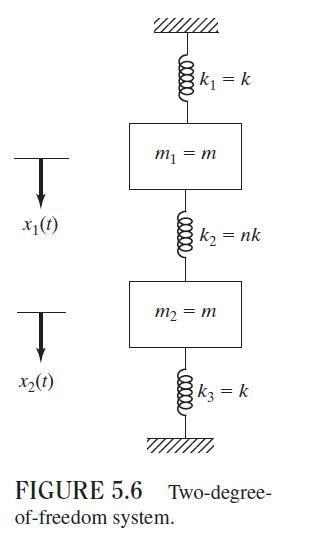
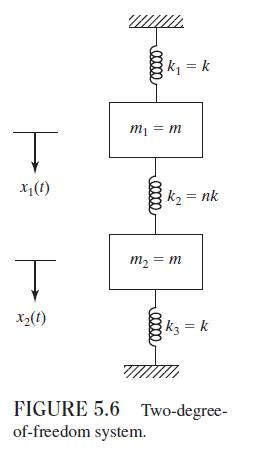
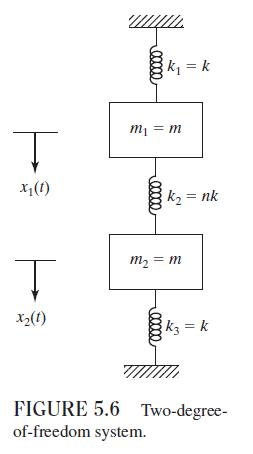
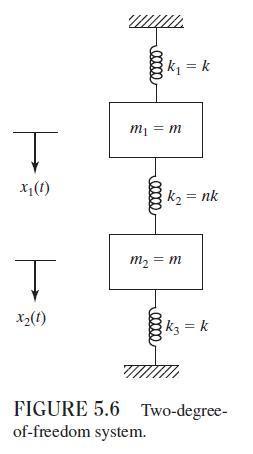
Find the natural frequencies of the system shown in Fig. 5.6 for \(k_{1}=300 \mathrm{~N} / \mathrm{m}\), \(k_{2}=500 \mathrm{~N} / \mathrm{m}, k_{3}=200 \mathrm{~N} / \mathrm{m}, m_{1}=2 \mathrm{~kg}\), and \(m_{2}=1 \mathrm{~kg}\). m (Car) 22 -k (Leaf springs) m2 (Wheels and axles) k (Tires) Y
Find the natural frequencies and mode shapes of the system shown in Fig. 5.24 for \(m_{1}=m_{2}=1 \mathrm{~kg}, k_{1}=2000 \mathrm{~N} / \mathrm{m}\), and \(k_{2}=6000 \mathrm{~N} / \mathrm{m}\). k k Base m1 x1(t) m2 x2(t) FIGURE 5.24 Undamped system.
Derive expressions for the displacements of the masses in Fig. 5.6 when \(m_{i}=5000 \mathrm{~kg}\), \(i=1,2\), and \(k_{i}=10 \mathrm{MN} / \mathrm{m}, i=1,2,3\). 00000 k = k T x1(t) m 00000 = m k = nk X(1) m2 00000 m k3 = k FIGURE 5.6 of-freedom system. Two-degree-
For the system shown in Fig. 5.6, \(m_{1}=1 \mathrm{~kg}, m_{2}=2 \mathrm{~kg}, k_{1}=2000 \mathrm{~N} / \mathrm{m}, k_{2}=1000 \mathrm{~N} / \mathrm{m}\), \(k_{3}=3000 \mathrm{~N} / \mathrm{m}\), and an initial velocity of \(20 \mathrm{~m} / \mathrm{s}\) is imparted to mass \(m_{1}\). Find the
For Problem 5.17, calculate \(x_{1}(t)\) and \(x_{2}(t)\) for the following initial conditions:a. \(x_{1}(0)=0.2 \mathrm{~m}, \dot{x}_{1}(0)=x_{2}(0)=\dot{x}_{2}(0)=0\).b. \(x_{1}(0)=0.2 \mathrm{~m}, \dot{x}_{1}(0)=x_{2}(0)=0, \dot{x}_{2}(0)=5.0 \mathrm{~m} / \mathrm{s}\).Data From Problem
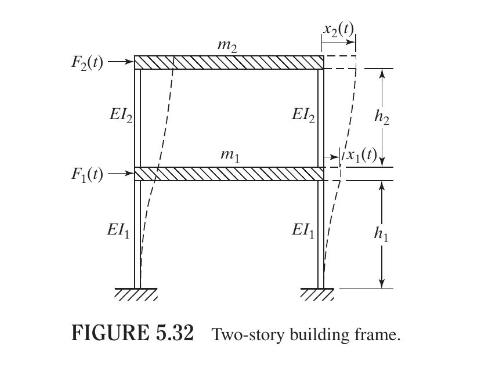
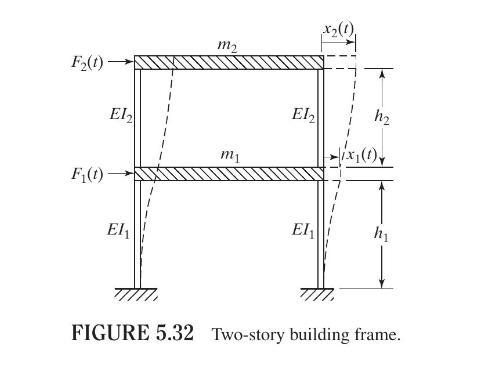
A two-story building frame is modeled as shown in Fig. 5.32. The girders are assumed to be rigid, and the columns have flexural rigidities \(E I_{1}\) and \(E I_{2}\), with negligible masses. The stiffness of each column can be computed as\[\frac{24 E I_{i}}{h_{i}^{3}}, \quad i=1,2\]For \(m_{1}=2
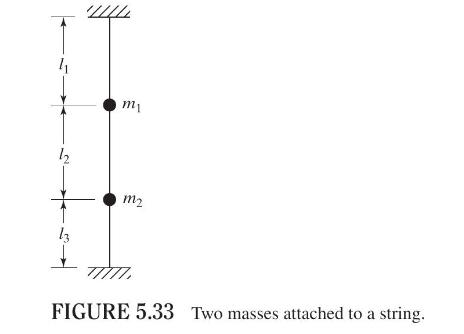
Figure 5.33 shows a system of two masses attached to a tightly stretched string, fixed at both ends. Determine the natural frequencies and mode shapes of the system for \(m_{1}=m_{2}=m\) and \(l_{1}=l_{2}=l_{3}=l\). 41 mi 13 m FIGURE 5.33 Two masses attached to a string.
Find the normal modes of the two-story building shown in Fig. 5.32 when \(m_{1}=3 m\), \(m_{2}=m, k_{1}=3 k\), and \(k_{2}=k\), where \(k_{1}\) and \(k_{2}\) represent the total equivalent stiffnesses of the lower and upper columns, respectively. F2(t) El F(t) El m x2(1) my El h El h FIGURE 5.32
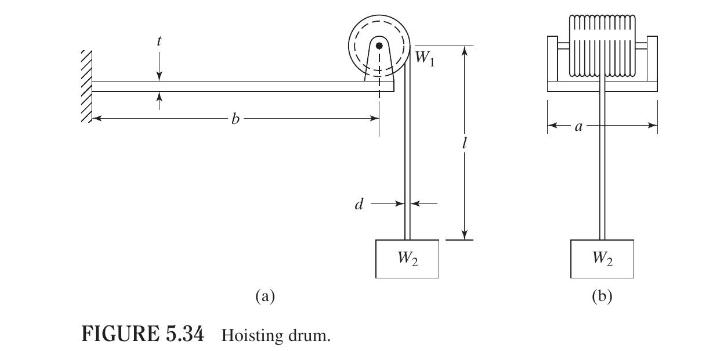
A hoisting drum, having a weight \(W_{1}\), is mounted at the end of a steel cantilever beam of thickness \(t\), width \(a\), and length \(b\), as shown in Fig. 5.34. The wire rope is made of steel and has a diameter of \(d\) and a suspended length of \(l\). If the load hanging at the end of the
Determine the initial conditions of the system shown in Fig. 5.24 for which the system vibrates only at its lowest natural frequency for the following data: \(k_{1}=k, k_{2}=2 k\), \(m_{1}=m, m_{2}=2 m\).Figure 5.24:- k k m1 00000 Base x1(t) m2 x2(t) FIGURE 5.24 Undamped system.
The system shown in Fig. 5.24 is initially disturbed by holding the mass \(m_{1}\) stationary and giving the mass \(m_{2}\) a downward displacement of \(0.1 \mathrm{~m}\). Discuss the nature of the resulting motion of the system.Figure 5.24:- k k m1 00000 Base x1(t) m2 x2(t) FIGURE 5.24 Undamped
Design the cantilever beam supporting the hoisting drum and the wire rope carrying the load in Problem 5.24 in order to have the natural frequencies of the system greater than \(10 \mathrm{~Hz}\) when \(W_{1}=5000 \mathrm{~N}\) and \(W_{2}=2500 \mathrm{~N}, b=0.75 \mathrm{~m}\), and \(l=1.5
Find the free-vibration response of the two-degree-of-freedom system shown in Fig. 5.6 with \(n=1, k=8\), and \(m=2\) for the initial conditions \(x_{1}(0)=1, x_{2}(0)=\dot{x}_{1}(0)=0\), and \(\dot{x}_{2}(0)=1\).Figure 5.6:- T x (1) "wwwww k = k m = m 00000 k = nk m = m X(1) k3 = k FIGURE 5.6
Find the free-vibration response of the two-degree-of-freedom system shown in Fig. 5.6 with \(n=1, k=8\), and \(m=2\) for the initial conditions \(x_{1}(0)=1\) and \(\mathrm{x}_{2}(0)=\dot{x}_{1}(0)=\) \(\dot{x}_{2}(0)=0\). T x (1) "wwwww k = k m = m 00000 k = nk m = m X(1) k3 = k FIGURE 5.6
Using the results of Example 5.1, verify that the mode shapes satisfy the following relations, known as orthogonality relations:Data From Example 5.1:-Figure 5.6:-\(\vec{X}^{(1)^{T}} \vec{X}^{(2)}=0, \quad \vec{X}^{(1)^{T}}[m] \vec{X}^{(2)}=0, \quad \vec{X}^{(1)^{T}}[m] \vec{X}^{(1)}=c_{1}=\)
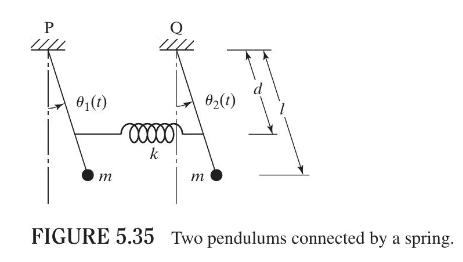
Two identical pendulums, each with mass \(m\) and length \(l\), are connected by a spring of stiffness \(k\) at a distance \(d\) from the fixed end, as shown in Fig. 5.35.a. Derive the equations of motion of the two masses.b. Find the natural frequencies and mode shapes of the system.c. Find the
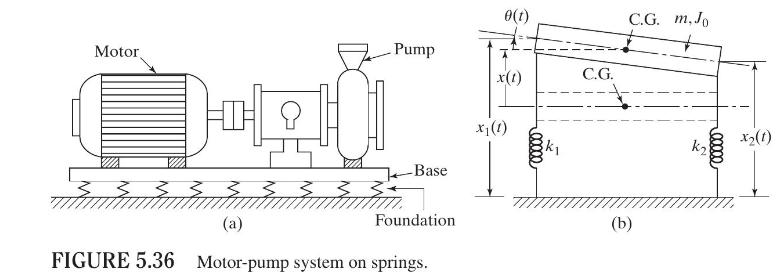
The motor-pump system shown in Fig. 5.36(a) is modeled as a rigid bar of mass \(m=50 \mathrm{~kg}\) and mass moment of inertia \(J_{0}=100 \mathrm{~kg}-\mathrm{m}^{2}\). The foundation of the system can be replacedby two springs of stiffness \(k_{1}=500 \mathrm{~N} / \mathrm{m}\) and \(k_{2}=200
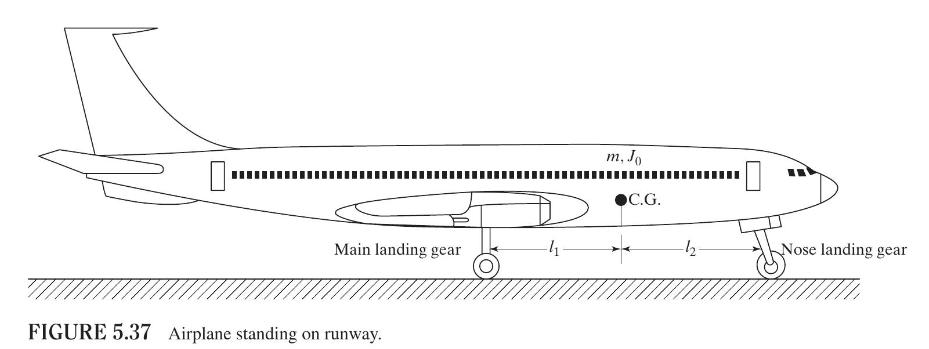
An airplane standing on a runway is shown in Fig. 5.37. The airplane has a mass \(m=20,000 \mathrm{~kg}\) and a mass moment of inertia \(J_{0}=50 \times 10^{6} \mathrm{~kg}-\mathrm{m}^{2}\). If the values of stiffness and damping constant are \(k_{1}=10 \mathrm{kN} / \mathrm{m}\) and \(c_{1}=2
The mass and stiffness matrices and the mode shapes of a two-degree-of-freedom system are given by\[[m]=\left[\begin{array}{ll}1 & 0 \\0 & 4\end{array}\right], \quad[k]=\left[\begin{array}{cc}12 & -k_{12} \\-k_{12} & k_{22}\end{array}\right], \quad \vec{X}^{(1)}=\left\{\begin{array}{c}1
The mass and stiffness matrices and the mode shapes of a two-degree-of-freedom system are given by\[[m]=\left[\begin{array}{cc}m_{1} & 0 \\0 & m_{2}\end{array}\right], \quad[k]=\left[\begin{array}{cc}27 & -3 \\-3 & 3\end{array}\right], \quad \vec{X}^{(1)}=\left\{\begin{array}{l}1
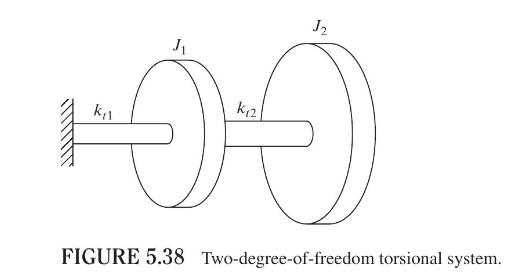
Determine the natural frequencies and normal modes of the torsional system shown in Fig. 5.38 for \(k_{t 2}=2 k_{t 1}\) and \(J_{2}=2 J_{1}\). k J k 2 FIGURE 5.38 Two-degree-of-freedom torsional system.
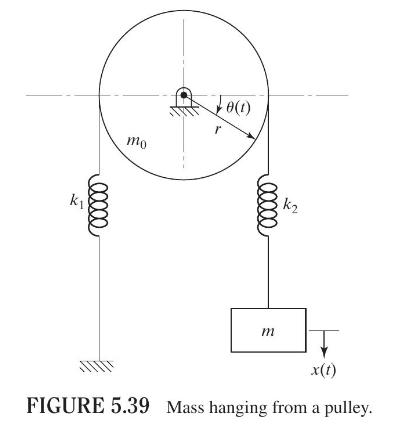
Determine the natural frequencies of the system shown in Fig. 5.39 by assuming that the rope passing over the cylinder does not slip. k 00000 mo m 8(1) 00000 k x(t) FIGURE 5.39 Mass hanging from a pulley.
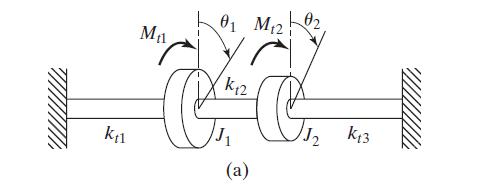
Find the natural frequencies and mode shapes of the system shown in Fig. 5.8 (a) by assuming that \(J_{1}=J_{0}, J_{2}=2 J_{0}\), and \(k_{t 1}=k_{t 2}=k_{t 3}=k_{t}\).Figure 5.8(a):- 01 M12 02 K1 Mn k12 12 K13 (a)
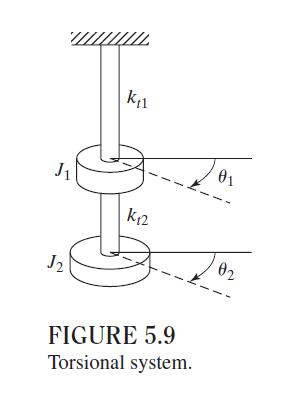
Determine the normal modes of the torsional system shown in Fig. 5.9 when \(k_{t 1}=k_{t}, k_{t 2}=5 k_{t}, J_{1}=J_{0}\), and \(J_{2}=5 J_{0}\). k1 J1 K2 01 J2 FIGURE 5.9 Torsional system. 02
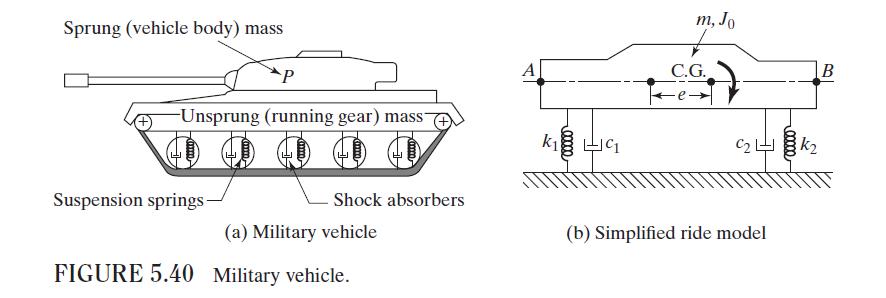
A simplified ride model of the military vehicle in Fig. 5.40 (a) is shown in Fig. 5.40(b). This model can be used to obtain information about the bounce and pitch modes of the vehicle. If the total mass of the vehicle is \(m\) and the mass moment of inertia about its C.G. is \(J_{0}\), derive the
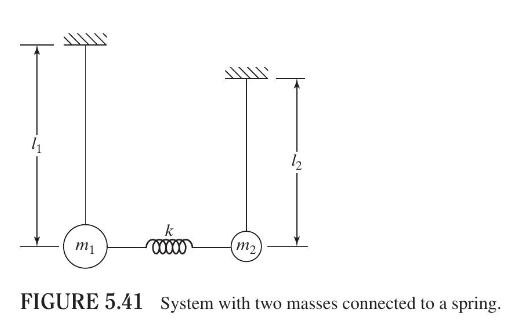
Find the natural frequencies and the amplitude ratios of the system shown in Fig. 5.41. k m1 00000 m2 FIGURE 5.41 System with two masses connected to a spring.
Showing 1500 - 1600
of 2655
First
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Last
Step by Step Answers