New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
advanced engineering mathematics
Advanced Engineering Mathematics 10th edition Erwin Kreyszig - Solutions
The order seems to be 1/n if f is discontinous, and 1/n2 if f is continuous but f' = df/dx is discontinuous, 1/n3 if f and f' are continuous but f" is discontinuous, etc. Try to verify this for examples. Try to prove it by integrating the Euler formulas by parts. What is the practical
Calculate the inverse of the 8 × 8 Fourier matrix. Transform a general sample of eight values and transform it back to the given data.
Sketch the given function and represent it as indicated. If you have a CAS, graph approximate curves obtained by replacing ∞ with finite limits; also look for Gibbs phenomena.f(x) = x + 1 if 0 < x < 1 and 0 otherwise; by the Fourier sine transform
Find(a) The Fourier cosine series(b) The Fourier sine series. Sketch f(x) and its two periodic extensions. Show the details. KIN NIA
Sketch the given function and represent it as indicated. If you have a CAS, graph approximate curves obtained by replacing ∞ with finite limits; also look for Gibbs phenomena.f(x) = x if 0 < x < 1 and 0 otherwise; by the Fourier integral
Sketch the given function and represent it as indicated. If you have a CAS, graph approximate curves obtained by replacing ∞ with finite limits; also look for Gibbs phenomena.f(x) = kx if α < x < b and 0 otherwise; by the Fourier transform
Find (a) The Fourier cosine series(b) The Fourier sine series. Sketch f(x) and its two periodic extensions. Show the details.f (x) = sin x (0 < x < π)
How does the frequency of the eigenfunctions of the rectangular membrane change(a) If we double the tension?(b) If we take a membrane of half the density of the original one?(c) If we double the sides of the membrane? Give reasons.
How does the frequency of the fundamental mode of the vibrating string depend on the length of the string? On the mass per unit length? What happens if we double the tension? Why is a contrabass larger than a violin?
For what kinds of problems will modeling lead to an ODE? To a PDE?
Show that c is the speed of each of the two waves given by (4).
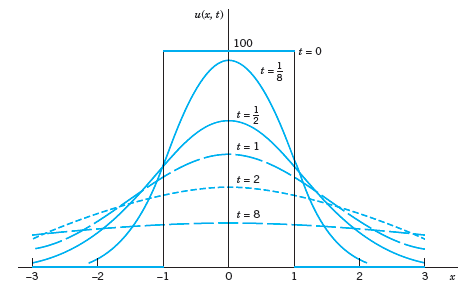
(a) Graph the basic Fig. 299.(b) In (a) apply animation to “see” the heat flow in terms of the decrease of temperature. (c) Graph u(x, t) with c = 1 as a surface over a rectangle of the form -α
How does the rate of decay of (8) with fixed n depend on the specific heat, the density, and the thermal conductivity of the material?
Prove it for second-order PDEs in two and three independent variables. Prove it by substitution.
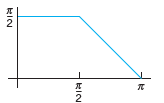
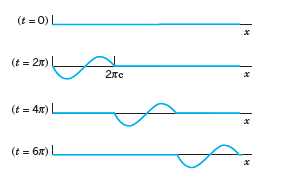
Sketch a figure similar to Fig. 317 when c = 1 and f(x) is “triangular,” say, f(x) = x if 0 (t = 0) L (t = 2) (t = 4n) L (t = 6) L 2
Mention some of the basic physical principles or laws that will give a PDE in modeling.
If the first eigenfunction (8) of the bar decreases to half its value within 20 sec, what is the value of the diffusivity?
Radial symmetry reduces (5) to ∇2u = urr + ur/r. Derive this directly from ∇2u = uxx + uyy. Show that the only solution of ∇2u = 0 depending only on r = √x2 + y2 is u = α ln r + b with arbitrary constants α and b.
Determine and sketch the nodal lines of the square membrane for m = 1, 2, 3, 4 and n = 1, 2, 3, 4.
Write down the derivation in this section for length L = π to see the very substantial simplification of formulas in this case that may show ideas more clearly.
How does the speed of the wave in Example 1 of the text depend on the tension and on the mass of the string?
State three or four of the most important PDEs and their main applications.
If a steel wire 2 m in length weighs 0.9 nt (about 0.20 lb) and is stretched by a tensile force of 300 nt (about 67.4 lb), what is the corresponding speed of transverse waves?
Using (6), obtain the solution of (1) in integral form satisfying the initial condition u (x, 0) = f(x), wheref(x) = 1/(1 + x2).
Sketch or graph and compare the first three eigenfunctions (8) with Bn = 1, c = 1, and L = π for t = 0, 0.1, 0.2, · · · ,1.0.
Show that (5) can be written ∇2u = (rur)r/r + uθθ/r2, a form that is often practical.
Verify (by substitution) that the given function is a solution of the PDE. Sketch or graph the solution as a surface in space.Wave Equation (1) with suitable cu = cos 4t sin 2x
Write a program for graphing un, with L = π and c2 of your choice similarly as in Fig. 287. Apply the program to u2, u3, u4. Also graph these solutions as surfaces over the xt-plane. Explain the connection between these two kinds of graphs.
What is “separating variables” in a PDE? When did we apply it twice in succession?
What are the frequencies of the eigenfunctions in Prob. 3?Data from Prob. 3If a steel wire 2 m in length weighs 0.9 nt (about 0.20 lb) and is stretched by a tensile force of 300 nt (about 67.4 lb), what is the corresponding speed of transverse waves?
Using (6), obtain the solution of (1) in integral form satisfying the initial condition u (x, 0) = f(x), wheref (x) = e-|x|
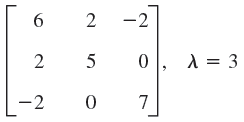
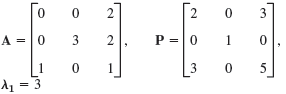
Find the eigenvalues. Find the corresponding eigenvectors. Use the given λ or factor in Probs. 11 and 15.
Find the growth rate in the Leslie model (see Example 3) with the matrix as given. Show the details.
Find the eigenvalues. Find the eigenvectors.
What is diagonalization? Transformation to principal axes?
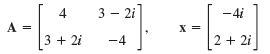
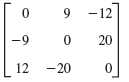
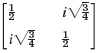
Is the matrix A Hermitian or skew-Hermitian? Find x̅TAx. Show the details.
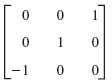
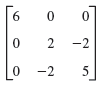
Are the following matrices symmetric, skew-symmetric, or orthogonal? Find the spectrum of each, thereby illustrating Theorems 1 and 5. Show your work in detail.
Find an eigenbasis (a basis of eigenvectors) and diagonalize. Show the details.
Find the eigenvalues. Find the corresponding eigenvectors.
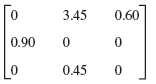
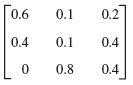
Find the limit state of the Markov process modeled by the given matrix. Show the details.
State the definitions and main properties of the three classes of real matrices and of complex matrices that we have discussed.
When can we expect orthogonal eigenvectors?
Are the following matrices symmetric, skew-symmetric, or orthogonal? Find the spectrum of each, thereby illustrating Theorems 1 and 5. Show your work in detail.
Find further 2 × 2 and 3 × 3 matrices without eigenbasis.
Find the eigenvalues. Find the corresponding eigenvectors.
Find the limit state of the Markov process modeled by the given matrix. Show the details.
What is an eigenbasis? When does it exist? Why is it important?
What is algebraic multiplicity of an eigenvalue? Defect?
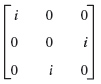
Is the given matrix Hermitian? Skew-Hermitian? Unitary? Find its eigenvalues and eigenvectors.
Are the following matrices symmetric, skew-symmetric, or orthogonal? Find the spectrum of each, thereby illustrating Theorems 1 and 5. Show your work in detail.
Verify this for A and A = P-1AP. If y is an eigenvector of P, show that x = Py are eigenvectors of A. Show the details of your work.
Find the eigenvalues. Find the corresponding eigenvectors.
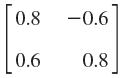
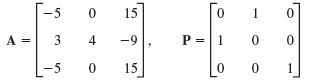
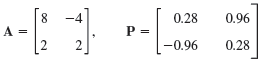
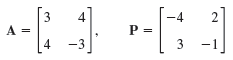
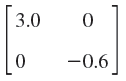
Given A in a deformation y = Ax, find the principal directions and corresponding factors of extension or contraction. Show the details.
Does a 5 × 5 matrix always have a real eigenvalue?
Verify this for A and A = P-1AP. If y is an eigenvector of P, show that x = Py are eigenvectors of A. Show the details of your work.
Can a real matrix have complex eigenvalues? Can a complex matrix have real eigenvalues?
Is the given matrix Hermitian? Skew-Hermitian? Unitary? Find its eigenvalues and eigenvectors.
Are the following matrices symmetric, skew-symmetric, or orthogonal? Find the spectrum of each, thereby illustrating Theorems 1 and 5. Show your work in detail.
Verify this for A and A = P-1AP. If y is an eigenvector of P, show that x = Py are eigenvectors of A. Show the details of your work.
Find the eigenvalues. Find the corresponding eigenvectors.
Given A in a deformation y = Ax, find the principal directions and corresponding factors of extension or contraction. Show the details.
Do there exist square matrices without eigenvalues?
Give a few typical applications of eigenvalue problems.
Is the given matrix Hermitian? Skew-Hermitian? Unitary? Find its eigenvalues and eigenvectors.
Are the following matrices symmetric, skew-symmetric, or orthogonal? Find the spectrum of each, there by illustrating Theorems 1 and 5. Show your work in detail.
Verify this for A and A = P-1AP. If y is an eigenvector of P, show that x = Py are eigenvectors of A. Show the details of your work.
Find the eigenvalues. Find the corresponding eigenvectors.
Given A in a deformation y = Ax, find the principal directions and corresponding factors of extension or contraction. Show the details.
In solving an eigenvalue problem, what is given and what is sought?
Is the given set of vectors a vector space? Give reasons. If your answer is yes, determine the dimension and find a basis. (v1, v2, · · · denote components.)All vectors in R4 with v1 = 2v2 = 3v3 = 4v4
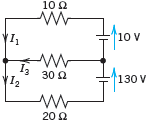
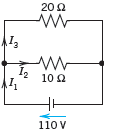
Find the currents.
Is the given set of vectors a vector space? Give reasons. If your answer is yes, determine the dimension and find a basis. (v1, v2, · · · denote components.)All vectors in R3 with 3v1 - v3 = 0, 2v1 + 3v2 - 4v3 = 0
Find the currents.
Is the given set of vectors a vector space? Give reasons. If your answer is yes, determine the dimension and find a basis. (v1, v2, · · · denote components.)All vectors in R5 with positive components
Determine the ranks of the coefficient matrix and the augmented matrix and state how many solutions the linear system will have.In Prob. 27Data from Prob. 27Showing the details, find all solutions or indicate that no solution exists. x + 2y = 6 3x + 5y = 20-4x +
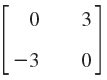
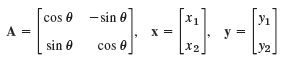
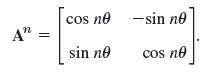
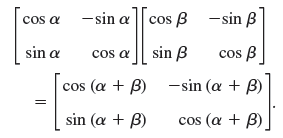
Rotations have various applications. We show in this project how they can be handled by matrices.(a) Show that the linear transformation y = Ax withis a counterclockwise rotation of the Cartesian x1x2-coordinate system in the plane about the origin, where θ is the angle of rotation.(b) Show that
Is the given set of vectors a vector space? Give reasons. If your answer is yes, determine the dimension and find a basis. (v1, v2, · · · denote components.)All vectors in R2 with v1 > v2
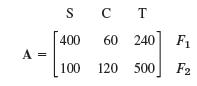
Two factory outlets F1 and F2 in New York and Los Angeles sell sofas (S), chairs (C), and tables (T) with a profit of $35, $62, and 30$, respectively. Let the sales in a certain week be given by the matrix Introduce a “profit vector” p such that the components of v = Ap give the total profits
Determine the ranks of the coefficient matrix and the augmented matrix and state how many solutions the linear system will have.In Prob. 23Data from Prob. 23Showing the details, find all solutions or indicate that no solution exists.9x + 3y - 6z = 602x - 4y + 8z = 4
Is the given set of vectors a vector space? Give reasons. If your answer is yes, determine the dimension and find a basis. (v1, v2, · · · denote components.)All vectors in R3 with v1 - v2 + 2v3 = 0
Write a program for a Markov process. Use it to calculate further steps in Example 13 of the text. Experiment with other stochastic 3 X 3 matrices, also using different starting values.
Showing the details, find all solutions or indicate that no solution exists. x + 2y = 6 3x + 5y = 20-4x + y = -42
Showing the details, find all solutions or indicate that no solution exists. 2x + 3y - 7z = 3-4x - 6y + 14z = 7
Are the following sets of vectors linearly independent? Show the details of your work.
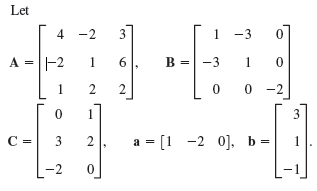
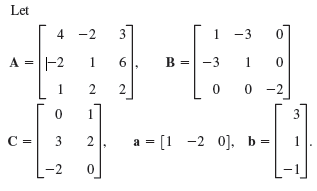
These matrices occur quite frequently in applications, so it is worthwhile to study some of their most important properties.(a) Verify the claims in (11) that αkj = αjk for a symmetric matrix, and αkj = -αjk for a skew symmetric matrix. Give examples.(b) Show that for every square matrix C
Showing the details, find all solutions or indicate that no solution exists.0.3x - 0.7y + 1.3z = 3.24 0.9y - 0.8z = -2.53 0.7z = 1.19
Solve by Cramer’s rule. Check by Gauss elimination and back substitution. Show details.-4w + x + y = -10 w - 4x + z = 1 w - 4y + z = -7 x +
Verify (5) for the first two column vectors of the coefficient matrix in Prob. 13.Data from Prob 13Find the inverse transformation. Show the details.y1 = 5x1 + 3x2 - 3x3y2 = 3x1 + 2x2 + 2x3y3 = 2x1 - x2 + 2x3
Are the following sets of vectors linearly independent? Show the details of your work.
Calculate AB in Prob. 11 column wise. Data from Prob. 11 Showing all intermediate results, calculate the following expression or give reasons why they are undefined: AB, ABT, BA, BTA
Showing the details, find all solutions or indicate that no solution exists.9x + 3y - 6z = 602x - 4y + 8z = 4
Solve by Cramer’s rule. Check by Gauss elimination and back substitution. Show details. 3y - 4z = 162x - 5y + 7z = -27
Verify (4) for the vectors in Probs. 15 and 18.Data from Prob 15Find the Euclidean norm of the vectors:[3 1 -4]TData from Prob 18Find the Euclidean norm of the vectors:[1 0 0 1 -1 0 -1
Write AB in Prob. 11 in terms of row and column vectors. Data from Prob. 11 Showing all intermediate results, calculate the following expression or give reasons why they are undefined: AB, ABT, BA, BTA
For what value(s) of k are the vectors [2 1/2 -4 0]T and [5 k 0 1/4]T orthogonal?
Are the following sets of vectors linearly independent? Show the details of your work.
Prove (2) for 2 × 2 matrices A = [αjk], B = [bjk], C = [cjk], and a general scalar.
Showing the details, find all solutions or indicate that no solution exists. 4y + z = 012x - 5y - 3z = 34-6x + 4z = 8
Methods of electrical circuit analysis have applications to other fields. For instance, applying the analog of Kirchhoff’s Current Law, find the traffic flow (cars per hour) in the net of one-way streets (in the directions indicated by the arrows) shown in the figure. Is the solution unique?
Solve by Cramer’s rule. Check by Gauss elimination and back substitution. Show details.3x - 5y = 15.56x + 16y = 5.0
Showing 1200 - 1300
of 3937
First
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Last
Step by Step Answers