New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
introduction mechanical engineering
Introduction To MATLAB For Engineers 3rd Edition William Palm III - Solutions
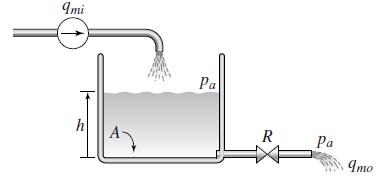
Consider the liquid-level system shown in Figure 10.7–1. The governing equation based on conservation of mass is Equation (10.7–2). Suppose that the height h is controlled by using a relay to switch the input flow rate between the values 0 and 50 kg/s. The flow rate is switched on when the
Evaluate the solution to Airy’s equation at x = 2 for the given initial conditions.
Solve Legendre’s equation for the given initial conditions.
The differential equation model for the motor torque m(t) required for a certain speed control system is where the desired speed is !d(t) and K is a constant called the control gain.a. Use the Laplace transform method to find the unit-step response [that is, υd(t) is a unit-step function].
The differential equation model for a certain speed control system for a vehicle iswhere the actual speed is υ, the desired speed is υd(t), and Kp and KI are constants called the control gains. Use the Laplace transform method to find the unit-step response [that is, υd (t) is a unit-step
The differential equation model for a certain position control system for a metal cutting tool is where the actual tool position is x; the desired position is xd (t); and Kp, KI, and KD are constants called the control gains. Use the Laplace transform method to find the unit-step response
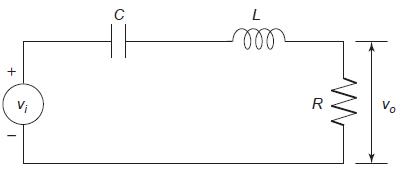
The RLC circuit described in Problem 28 and shown in Figure P28 has the following differential equation model: Use the Laplace transform method to solve for the unit-step response of υ0(t) for zero initial conditions, where C = 10-5 F and L = 5 , 10-3 H.For the first case (a broadband
This equation describes the motion of a certain mass connected to a spring with viscous friction on the surface where f (t) is an applied force. Suppose that f(t) = 0 for t < 0 and f (t) = 10 for t ≥ 0.a. Use MuPAD to obtain y(t) if y(0) = ẏ(0) = 0.b. Use MuPAD to obtain y(t) if y(0) =
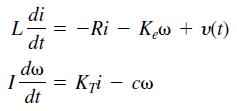
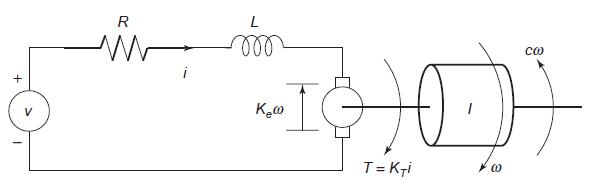
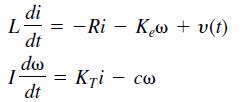
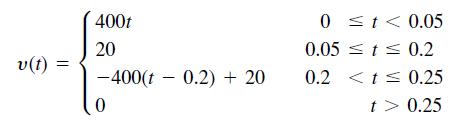
The equations for an armature-controlled dc motor follow. The motor’s current is i and its rotational velocity is ω. where L, R, and I are the motor’s inductance, resistance, and inertia; KT and Ke are the torque constant and back-emf constant; c is a viscous damping constant; and υ(t)
This equation describes the motion of a certain mass connected to a spring with viscous friction on the surface where f(t) is an applied force. Suppose that f (t) = 0 for t < 0 and f(t) = 10 for t ≥ 0.a. Use MuPAD to obtain y(t) if y(0) = ẏ(0) = 0.b. Use MuPAD to obtain y(t) if y(0) = 0
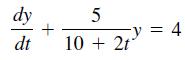
The following equation describes a certain dilution process, where y(t) is the concentration of salt in a tank of freshwater to which salt brine is being added:Suppose that y(0) = 0. Use MuPAD to obtain y(t). dy 2 y = 4 10 + 2t dt
This equation describes the motion of a mass connected to a spring with viscous friction on the surface where f(t) is an applied force. The position and velocity of the mass at t = 0 are denoted by x0 and υ0. Use MuPAD to answer the following questions.a. What is the free response in terms of
The equation for the voltage y across the capacitor of an RC circuit is where υ(t) is the applied voltage. Suppose that RC = 0.2 s and that the capacitor voltage is initially 2 V. If the applied voltage is υ(t) = 10[2 – e-t sin(5πt)], use MuPAD to obtain the voltage y(t). dy RC + y = v(t)
The following equation describes the temperature T(t) of a certain object immersed in a liquid bath of temperature Tb(t): Suppose the object’s temperature is initially T(0) = 70°F and the bath temperature is 170°F. Use MuPAD to answer the following questions:a. Determine T(t).b. How long
The equation for the voltage y across the capacitor of an RC circuit is where υ(t) is the applied voltage. Suppose that RC = 0.2 s and that the capacitor voltage is initially 2 V. If the applied voltage goes from 0 to 10 V at t = 0, use MuPAD to determine the voltage y(t). dy RC + y = v(t) dt
A particular rubber ball rebounds to one-half its original height when dropped on a floor .a. If the ball is initially dropped from a height h and is allowed to continue to bounce, find the expression for the total distance traveled by the ball after the ball hits the floor for the nth time.b. If
Find the expression for the sum of the geometric seriesfor r ≠ 1. n-1 k=0
Use MuPAD to compute the following limits. x + 1 lim x- 00 а. 3x b. lim 2x 2x + 3 X -00
Use MuPAD to compute the following limits. a. lim x* x0+ b. lim (cos x)/tan x x0+ 1 さ1- c. lim x-0+ sin x d. lim x-0- r 2 - 25 e. lim x-5-x - 10x +25 x - 1 f. lim x→1+ sin[(x - 1)']
Use MuPAD to compute the following limits. a. lim - 4 b. lim x--2 + 4 x4 + 2x? c. lim x-0 x + x
Integrals that cannot be evaluated in closed form sometimes can be evaluated approximately by using a series representation for the integrand. For example, the following integral is used for some probability calculations: a. Obtain the Taylor series for e-x2 about x = 0 and integrate the first
Find the Taylor series for ex sin x about x = 0 in two ways:a. By multiplying the Taylor series for ex and that for sin x.b. By using the taylor function directly on ex sin x.
Use the first five nonzero terms in the Taylor series for eix, sinx, and cos x about x = 0 to demonstrate the validity of Euler’s formula eix = cos x + i sin x.
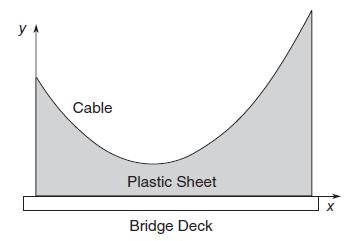
The shape of a cable hanging with no load other than its own weight is a catenary curve. A particular bridge cable is described by the catenary y(x) = 10 cosh[(x - 20)/10] for 0 ≤ x ≤ 50, where x and y are the horizontal and vertical coordinates measured in feet.The length L of a curve
The shape of a cable hanging with no load other than its own weight is a catenary curve. A particular bridge cable is described by the catenary y(x) = 10 cosh[(x - 20)/10] for 0 ≤ x ≤ 50, where x and y are the horizontal and vertical coordinates measured in feet. (See Figure P29.) It is desired
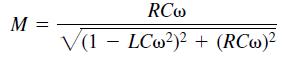
The RLC circuit shown in Figure P28 can be used as a narrowband filter . If the input voltage !i(t) consists of a sum of sinusoidally varying voltages with different frequencies, the narrowband filter will allow to pass only those voltages whose frequencies lie within a narrow range. The
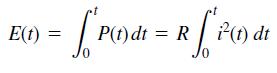
The power P dissipated as heat in a resistor R as a function of the current i(t) passing through it is P = i2R. The energy E(t) lost as a function of time is the time integral of the power. Thus If the current is measured in amperes, the power is in watts and the energy is in joules (1 W = 1
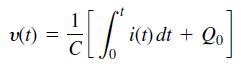
The equation for the voltage υ(t) across a capacitor as a function of time iswhere i(t) is the applied current and Q0 is the initial charge. Suppose that C = 10-6 F and that Q0 = 0. If the applied current is i(t) = [0.01 + 0.3e-5t sin(25υt)]10-3 A, use MuPAD to obtain the voltage υ(t). v(t) i(t)
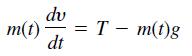
A rocket’s mass decreases as it burns fuel. The equation of motion for a rocket in vertical flight can be obtained from Newton’ s law and is where T is the rocket’s thrust and its mass as a function of time is given by m(t) = m0(1 - rt/b). The rocket’s initial mass is m0, the burn time
A certain object has a mass m $ 100 kg and is acted on by a force f (t) = 500[2 – e-t sin(5πt)] N. The mass is at rest at t = 0. Use MuPAD to compute the object’s velocity at t = 5 s. The equation of motion is mυ̇ = f(t).
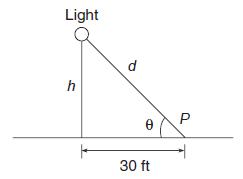
A certain spherical street lamp emits light in all directions. It is mounted on a pole of height h (see Figure P23). The brightness B at point P on the sidewalk is directly proportional to sin + and inversely proportional to the square of the distance d from the light to the point. Thus where c is
Suppose you have a wire of length L. You cut a length x to make a square and use the remaining length L - x to make a circle. Use MuPAD to find the length x that maximizes the sum of the areas enclosed by the square and the circle.
Ship A is traveling north at 6 mi/hr, and ship B is traveling west at 12 mi/hr. When ship A was dead ahead of ship B, it was 6 mi away. Use MuPAD to determine how close the ships come to each other.
Aparticular circle is centered at the origin and has a radius of 5. Use MuPAD to find the equation of the line that is tangent to the circle at the point x = 3, y = 4.
Use MuPAD to find the point on the line y = 2 – x/3 that is closest to the point x = -3, y = 1.
The surface area of a sphere of radius r is S = 4πr2. Its volume isV = 4πr3/3.a. Use MuPAD to find the expression for dS/dV.b. A spherical balloon expands as air is pumped into it. What is the rate of increase in the balloon’s surface area with volume when its volume is 30 in.3?
Use MuPAD to determine all the local minima and local maxima and all the inflection points where dy/dx = 0 of the following function: y = x - + 8x - 4 3
Use MuPAD to find all the values of x where the graph of y = 3x - 2x has a horizontal tangent line.
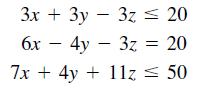
Solve the following optimization problem. MinimizeJ = x + 3y + 2zsubject to the constraints 3x + 3y – 3z < 20 6x – 4y – 3z = 20 7x + 4y + 11z < 50
Solve the following recurrence relation for the given initial conditions. y(n + 2) – 0.3y(n + 1) + 0.02y(n) = 10 y(0) = 2 y(1) = 0
The equations for the armature-controlled dc motor shown in Figure P13 follow. The motor’s current is i, and its rotational velocity is 2. where L, R, and I are the motor’s inductance, resistance, and inertia; KT and Ke are the torque constant and back-emf constant; c is a viscous damping
The currents i1, i2, and i3 in the circuit shown in Figure P12 are described by the following equation set if all the resistances are equal to R. Here υ1 and υ2 are applied voltages; the other two currents can be found from i4 = i1 - i2 and i5 = i2 - i3.a. Use both the matrix inverse method
Use the matrix inverse and the matrix division method to solve the following set for x and y in terms of c: 4cx + 5y = 43 3x – 4y = -22
Find the characteristic polynomial and roots of the following matrix: -- A = 21 3k -7 .
Show that R-1(a) = R(-a). This equation shows that a rotation through a negative angle is equivalent to an inverse transformation.
Show that R-1(a)R(a) = I, where I is the identity matrix and R(a) is the rotation matrix. This equation shows that the inverse coordinate transformation returns you to the original coordinate system.
The equation describes the polar coordinates of an orbit with the coordinate origin at the sun. If ∈ = 0, the orbit is circular; if 0 < ∈ < 1, the orbit is elliptical. The planets have orbits that are nearly circular; comets have orbits that are highly elongated
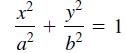
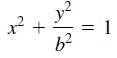
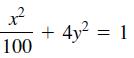
The equation for an ellipse centered at the origin of the Cartesian coordinates (x, y) is where a and b are constants that determine the shape of the ellipse.a. In terms of the parameter b, use MuPAD to find the points of intersection of the two ellipses described byAndb. Evaluate the solution
Use MuPAD to solve the polynomial equation x3 + 8x2 + ax + 10 = 0 for x in terms of the parameter a, and evaluate your solution for the case a = 17. Use MuPAD to check the answer.
The law of cosines for a triangle states that a2 = b2 + c2 - 2bc cosA, where a is the length of the side opposite the angle A, and b and c are the lengths of the other sides.a. Use MuPAD to solve for b.b. Suppose that A = 60°, a = 5 m, and c = 2 m. Determine b.
The equation of a circle of radius r centered at x = 0, y = 0 isx2 + y2 = r2Use MuPAD functions to nd the equation of a circle of radius r centered at the point x = a, y = b. Rearrange the equation into the formAx2 + Bx + Cxy + Dy + Ey2 = F and nd the expressions for the coef cients in terms of a,
Two polynomials in the variable x are represented by the coefficient vectors p1 = [6,2,7,-3] and p2 = [10,-5,8].a. Use MuPAD to find the product of these two polynomials; express the product in its simplest form.b. Use MuPAD to find the numeric value of the product if x = 2.
Use MuPAD to prove the following identities:a. sin2x = cos2 x = 1b. sin(x + y) = sin x cosy + cosx sinyc. sin2x = 2 sin x cosxd. cosh2x - sinh2 x = 1
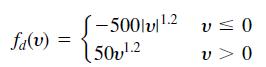
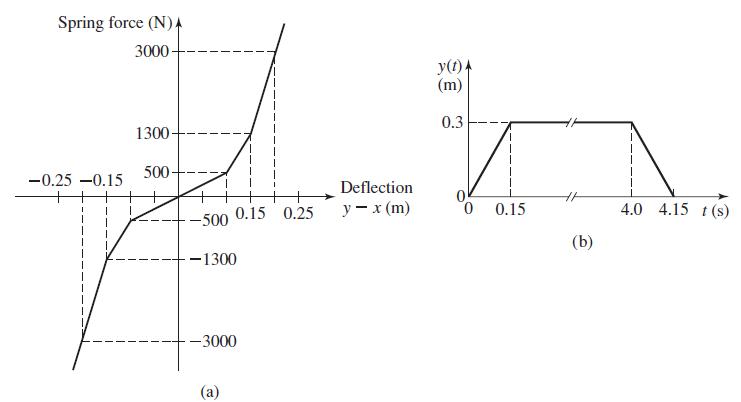
Redo the Simulink suspension model developed in Section 10.9, using the spring relation and input function shown in Figure P34 and the following damper relation.Use the simulation to plot the response. Evaluate the overshoot and undershoot.Figure P34 -500lvl12 v s 0 fa(v) = 50v12 v > 0
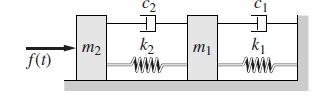
Consider the system shown in Figure P35. The equations of motion are Suppose that m1 = m2 = 1, c1 = 3, c2 = 1, k1 = 1, and k2 = 4.a. Develop a Simulink model of this system. In doing this, consider whether to use a state variable representation or a transfer-function representation of the
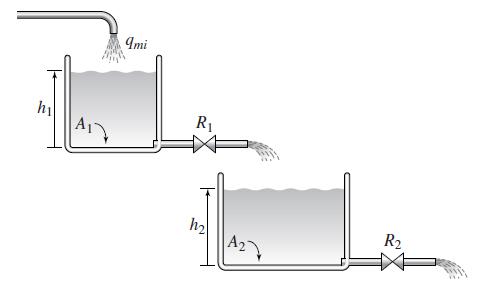
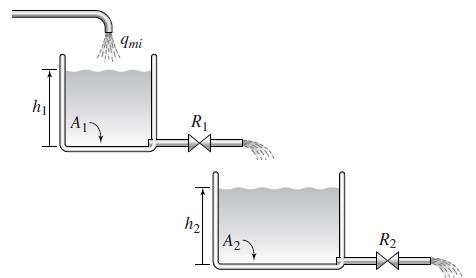
Refer to Figure P30. Suppose there is a dead time of 10 sec between the out flow of the top tank and the lower tank. Use the subsystem block developed in Section 10.7 to create a Simulink model of this system. Using the parameters given in Problem 30, plot the heights h1 and h2 versus time.Figure
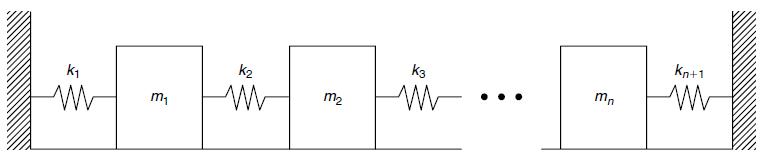
Consider Figure 10.7–8 for the case where there are three masses. Use the values m1 = m3 = 10 kg, m2 = 30 kg, k1 = k4 = 104 N/m, and k2 = k3 = 2 × 104 N/m.a. Develop a subsystem block for one mass.b. Use the subsystem block to construct a Simulink model of the entire system of three masses. Plot
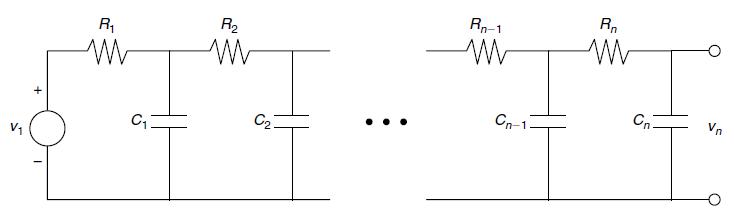
Consider Figure 10.7–7 for the case where there are three RC loops with the values R1 = R3 = 104 Ω, R2 = 5 × 104 Ω, C1 = C3 = 10-6 F, and C2 = 4 × 10-6 F.a. Develop a subsystem block for one RC loop.b. Use the subsystem block to construct a Simulink model of the entire system of three loops.
a. Use the subsystem block developed in Section 10.7 to construct a Simulink model of the system shown in Figure P30. The mass in flow rate is a step function.b. Use the Simulink model to obtain plots of h1(t) and h2(t) for the following parameter values: A1 = 3 ft2, A2 = 5 ft2, R1 = 30 ft-1 ∙
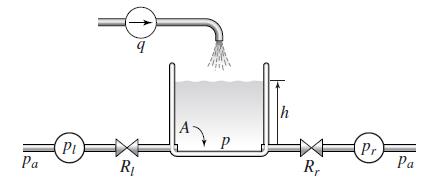
Refer to Figure 10.7–2. Assume that the resistances obey the linear relation, so that the mass flow ql through the left-hand resistance is ql = (pl – p)/Rl, with a similar linear relation for the right-hand resistance.a. Create a Simulink subsystem block for this element.b. Use the subsystem
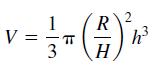
A cone-shaped paper drinking cup (like the kind used at water fountains) has a radius R and a height H. If the water height in the cup is h, the water volume is given by Suppose that the cup’s dimensions are R = 1.5 in. and H = 4 in.a. If the flow rate from the fountain into the cup is 2 in.
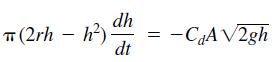
The equation describing the water height h in a spherical tank with a drain at the bottom is Suppose that the tank’s radius is r = 3 m and the circular drain hole of area A has a radius of 2 cm. Assume that Cd = 0.5 and that the initial water height is h(0) = 5 m. Use g ! 9.81 m/s2. Use
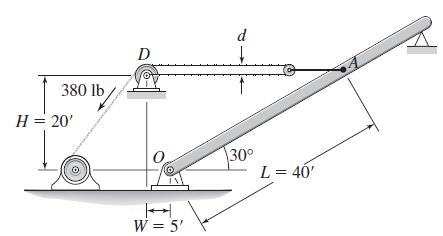
Consider the system for lifting a mast shown in Figure P26. The 70-ft-long mast weighs 500 lb. The winch applies a force f = 380 lb to the cable. The mast is supported initially at an angle of 30), and the cable at A is initially horizontal. The equation of motion of the mast is Create and run
The following model describes a mass supported by a nonlinear, hardening spring. The units are SI. Use g = 9.81 m/s2. Create a Simulink model to plot the solution for 0 ≤ t ≤ 2. 5y = 5g – (900y + 1700y) y(0) = 0.5 ý(0) = 0 %D
Create a Simulink model to plot the solution of the following equation for 0 ≤ t ≤ 3. i + 10x = 5 sin 3t x(0) = 1 %3D
Construct a Simulink model to plot the solution of the following equation for 0 ≤ t ≤ 4. 2x + 12i + 10x? = 8 sin 0.8t x(0) = i(0) = 0 %3D
Use Transfer Function blocks to construct a Simulink model to plot the solution of the following equations for 0 ≤ t ≤ 2 where f(t) = 50us(t). At the output of the first block there is a saturation that limits |x| to be ≤ 1. This limits the input to the second block. 3x + 15i + 18x =
Use Transfer Function blocks to construct a Simulink model to plot the solution of the following equations for 0 ≤ t ≤ 2 where f (t) = 50us (t). At the output of the first block there is a dead zone for -1 ≤ x ≤ 1. This limits the input to the second block. 3x + 15x + 18x = f(t) x(0) =
Use Transfer Function blocks to construct a Simulink model to plot the solution of the following equations for 0 ≤ t ≤ 2. where f(t) = 75us(t). 3* + 15x + 18x = f(t) x(0) = i(0) = 0 2ÿ + 16y + 50y = x(t) y(0) = ý (0) = 0
Use the Transfer Function block to construct a Simulink model to plot the solution of the following equation for 0 ≤ t ≤ 4. 2x + 12i + 10x Su,(t) – Su,(t – 2) x(0) = i(0) = 0
Refer to Problem 15. Use the simulation with qmax = 8 × 105 to compare the energy consumption and the thermostat cycling frequency for the two temperature bands (69°, 71°) and (68°, 72°).
a. Develop a Simulink model of a thermostatic control system in which the temperature model is where T is the room air temperature in °F, Tα is the ambient (outside) air temperature in )F, time t is measured in hours, q is the input from the heating system in lb ft/hr, R is the thermal
A certain mass, m = 2 kg, moves on a surface inclined at an angle ϕ = 30° above the horizontal. Its initial velocity is (0) = 3 m/s up the incline. An external force of f1 = 5 N acts on it parallel to and up the incline. The coefficient of Coulomb friction is µ = 0.2. Use the Sign block and
Obtain a series solution to the following Legendre equation for the given initial conditions.
If a mass-spring system has Coulomb friction on the surface rather than viscous friction, its equation of motion is where µ is the coefficient of friction. Develop a Simulink model for the case where m = 1kg, k = 5 N/m, µ = 0.4, and g = 9.8 m/s2. Run the simulation for two cases:(a) The
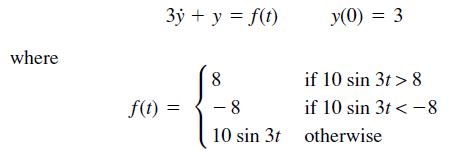
Use the Saturation block to create a Simulink model to plot the solution of the following equation for 0 ≤ t ≤ 6. 3y + y = f(t) y(0) = 3 %D where 8 if 10 sin 3t > 8 f(t) = - 8 if 10 sin 3t < -8 10 sin 3t otherwise
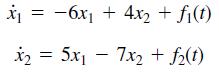
Construct a Simulink model to plot the solution of the following equations for 0 ≤ t ≤ 3 where f1(t) is a step function of height 3 starting at t = 0 and f2(t) is a step function of height -3 starting at t = 1. * = -6x1 + 4x2 + fi(t) iz = 5x1 - 7x, + f2(t)
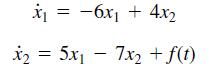
Construct a Simulink model to plot the solution of the following equations for 0 ≤ t ≤ 2 where f(t) = 3t. Use the Ramp block in the Sources library. ij = -6x1 + 4x2 i2 = 5x - 7x, +f(t)
A tank having vertical sides and a bottom area of 100 ft2 is used to store water. To fill the tank, water is pumped into the top at the rate given in the following table. Use Simulink to solve for and plot the water height h(t) for 0 ≤ t ≤10 min. Time (min) 1 3 4 7 8 9. 10 Flow Rate (ft'/min) 0
Construct a Simulink model to plot the solution of the following equation for 0 ≤ t ≤ 10. where us(t) is a unit-step function (in the Block Parameters window of the Step block, set the Step time to 0, the Initial value to 0, and the Final value to 1). 15й + 5х 4u,(t) — 4и,(t - 2) х0)
The following equation has no analytical solution even though it is linear.ẋ + x = tan t x(0) = 0The approximate solution, which is less accurate for large values of t, is Create a Simulink model to solve this problem, and compare its solution with the approximate solution over the range 0
A projectile is launched with a velocity of 100 m/s at an angle of 30) above the horizontal. Create a Simulink model to solve the projectile’s equations of motion where x and y are the horizontal and vertical displacements of the projectile. Use the model to plot the projectile’s
Create a Simulink model to plot the solution of the following equation for 0 ≤ t ≤ 6. 10y = 7 sin 4t + 5 cos 3t y(0) = 3 ý (0) = 2
Draw a simulation diagram for the following equation. 3y + 5 sin y = f(t)
Draw a simulation diagram for the following equation. 5ÿ = 3ý + 7y = f(t)
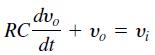
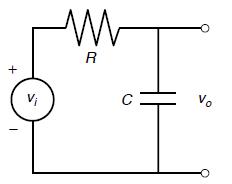
The model for the RC circuit shown in Figure P42 is For RC = 0.2 s, plot the voltage response υo(t) for the case where the applied voltage is a single square pulse of height 10 V and duration 0.4 s, starting at t = 0. The initial capacitor voltage is zero.Figure P42 dv. RC- + v, = Vị dt
Draw a simulation diagram for the following equation. ý = 5f(t) – 7y
Consider the following equation. a. Plot the free response for the initial conditions y(0) = 10,ẏ(0) = -5.b. Plot the unit-step response (for zero initial conditions).c. The total response to a step input is the sum of the free response and the step response. Demonstrate this fact for this
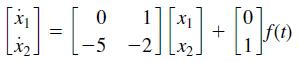
The following state model describes the motion of a certain mass connected to a spring, with viscous friction on the surface, where m = 1, c = 2, and k = 5. a. Use the initial function to plot the position x1 of the mass, if the initial position is 5 and the initial velocity is 3.b. Use the
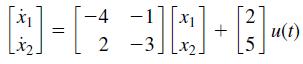
Find the reduced form of the following state model. -4 -1 2 -3 и() 15
Compute and plot the unit-step response of the following model. 10ў + бў + 2у %3Df+ 7f
Compute and plot the unit-impulse response of the following model. 10y + 3y + 7y = f(t) )
The equations for an armature-controlled dc motor are the following. The motor’s current is i and its rotational velocity is ω. where L, R, and I are the motor’s inductance, resistance, and inertia; KT and Ke are the torque constant and back emf constant; c is a viscous damping constant;
Van der Pol’s equation isThis equation is stiff for large values of the parameter 3. Compare the performance of ode45 and ode15s for this equation. Use 3 =1000 and 0 ≤ t ≤ 3000, with the initial conditions y(0) = 2, ẏ(0) = 0. Plot y(t) versus t. ў — р(1 — у)ў + у %3D 0
The equation of motion for a pendulum whose base is accelerating horizontally with an acceleration a(t) is Suppose that g = 9.81 m/s2, L " 1 m, and θ̇(0) = 0. Plot ,(t) for 0 ≤ t ≤ 10 s for the following three cases.a. The acceleration is constant: a = 5 m/s2, and θ(0) = 0.5 rad.b. The
Van der Pol’s equation has been used to describe many oscillatory processes. It is Plot y(t) for 3 = 1 and 0 ≤ t ≤ 20, using the initial conditions y(0) = 5, ẏ(0) = 0. ў — р(1 — у?)ў + у 3 0 y
The following equation describes the motion of a certain mass connected to a spring, with no friction where f(t) is an applied force. Suppose the applied force is sinusoidal with a frequency of ω rad/s and an amplitude of 10 N: f (t) = 10 sin(ωt).Suppose that the initial conditions are y(0)
The following equation describes the motion of a certain mass connected to a spring, with viscous friction on the surface where f(t) is an applied force. Suppose that f(t) = 0 for t + 0 and f(t) = 10 for t ≥ 0.a. Plot y(t) for y(0) = ẏ(0) = 0.b. Plot y(t) for y(0) = 0 and ẏ(0) = 10.
The following equation describes the motion of a certain mass connected to a spring, with viscous friction on the surface where f(t) is an applied force. Suppose that f (t) = 0 for t + 0 and f (t) = 10 for t ≥ 0.a. Plot y(t) for y(0) = ẏ(0) = 0.b. Plot y(t) for y(0) = 0 and ẏ(0) = 10.
The following equation describes a certain dilution process, where y(t) is the concentration of salt in a tank of freshwater to which salt brine is being added.Suppose that y(0) = 0. Plot y(t) for 0 ≤ t ≤ 10. dy = 4 !! dt 10 + 2t
Showing 3900 - 4000
of 4547
First
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
Step by Step Answers


![a. lim x* x0+ b. lim (cos x)/tan x x0+ 1 さ1- c. lim x-0+ sin x d. lim x-0- r 2 - 25 e. lim x-5-x - 10x +25 x - 1 f. lim x→1+ sin[(x - 1)']](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1594/1/0/6/7645f04238ce759c1594106764320.jpg)