New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
first course differential equations
Differential Equations And Linear Algebra 4th Edition C. Edwards, David Penney, David Calvis - Solutions
For each two-population system in Problems 26 through 34, first describe the type of x-and y-populations involved (exponential or logistic) and the nature of their interaction— competition, cooperation, or predation. Then find and characterize the system’s critical points (as to type and
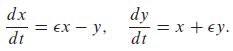
The term bifurcation generally refers to something “splitting apart.” With regard to differential equations or systems involving a parameter, it refers to abrupt changes in the character of the solutions as the parameter is changed continuously. Problems 33 through 36 illustrate sensitive cases
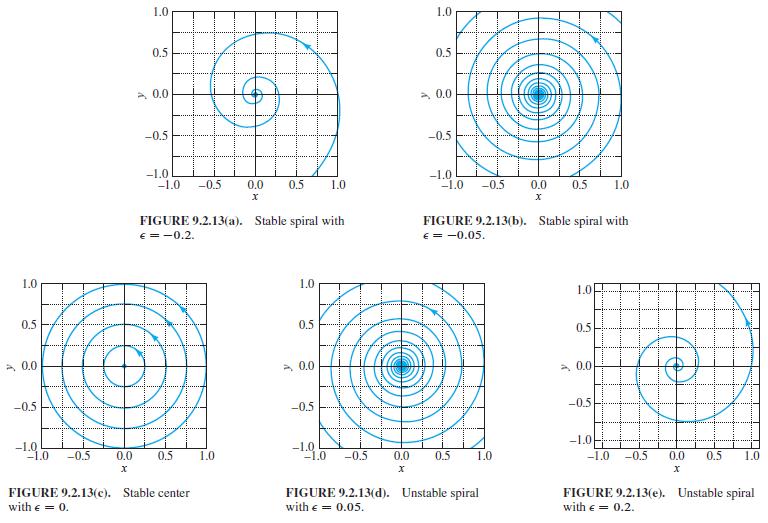
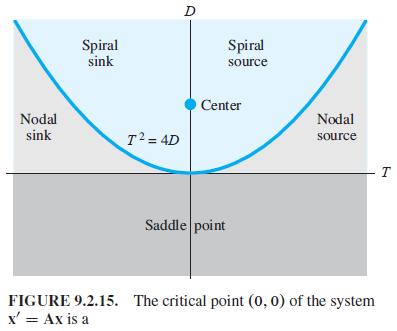
First note that the characteristic equation of the 2 x 2 matrix A can be written in the form λ2 - Tλ + D = 0, where D is the determinant of A and the trace T of the matrix A is the sum of its two diagonal elements. Then apply Theorem 1 to show that the type of the critical point (0, 0) of the
Find the inverse Laplace transform f (t) of each function given in Problems 1 through 10. Then sketch the graph of f. F(s) = -3s e 2 S
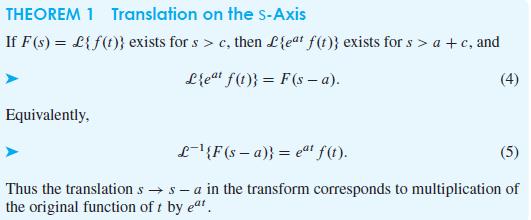
Apply the translation theorem to find the Laplace transforms of the functions in Problems 1 through 4. f(t) = 14 ent
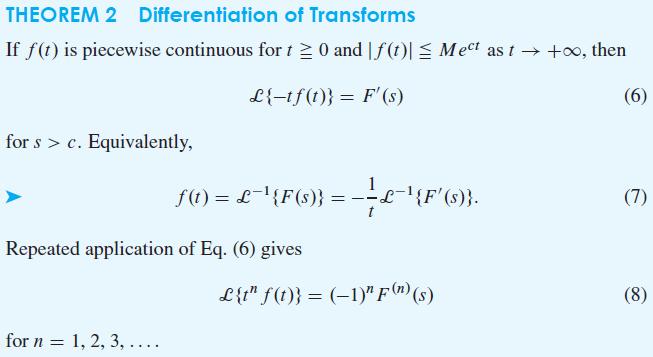
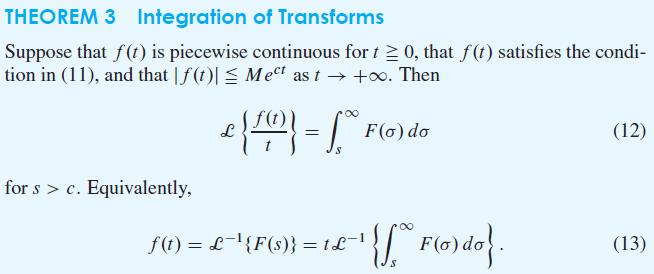
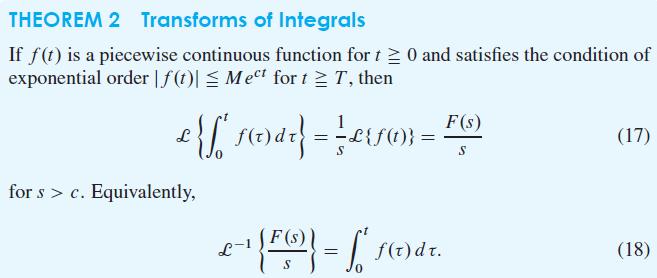
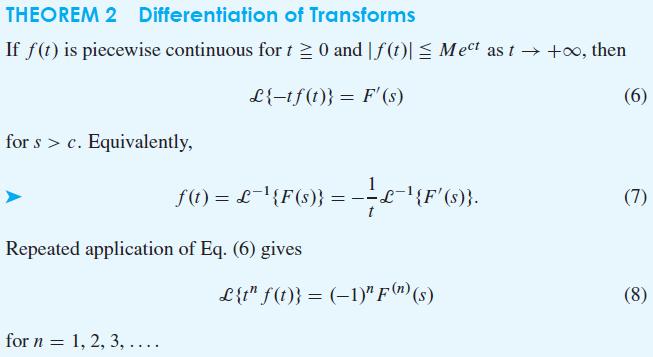
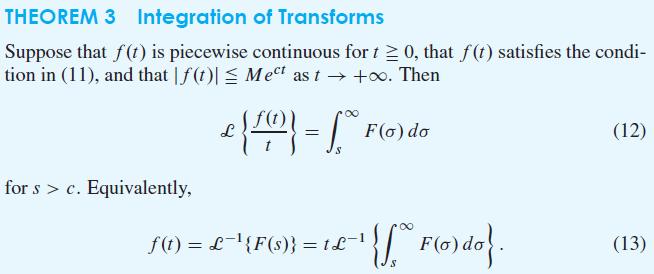
In Problems 15 through 22, apply either Theorem 2 or Theorem 3 to find the Laplace transform of f (t). f(t) = sint t
Find the convolution f(t) * g(t) in Problems 1 through 6.f(t) = 1, g(t) ≡ 1
Apply the definition in (1) to find directly the Laplace transforms of the functions described (by formula or graph) in Problems 1 through 10.f(t) = t
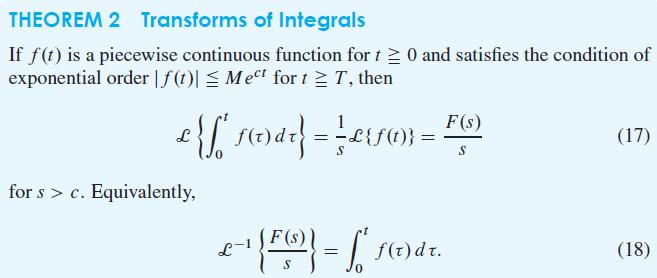
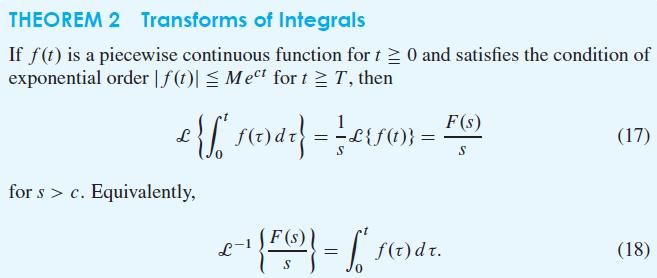
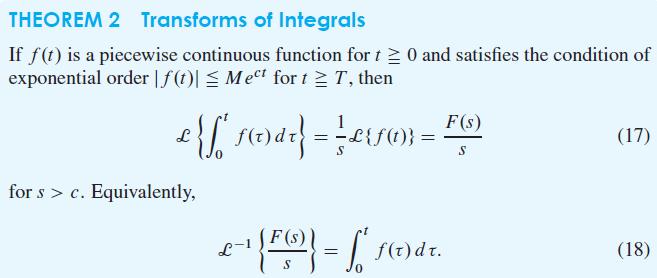
Apply Theorem 2 to find the inverse Laplace transforms of the functions in Problems 17 through 24. F(s) = 1 s(s² + 4)
Use the transforms in Fig. 10.1.2 to find the Laplace transforms of the functions in Problems 11 through 22. A preliminary integration by parts may be necessary. f (t) = (1 + t)3 t f(t) t" (n ≥0) g@ (a>−1) eat cos kt sin kt cosh kt sinhkt u(t - a) 13 S n! gn+T F(s) Γ(α +
Find the Laplace transforms of the functions given in Problems 11 through 22. f(t)=tift ≤ 1; f(t) = 1 ift > 1
Apply Theorem 2 to find the inverse Laplace transforms of the functions in Problems 17 through 24. F(s) = 2s +1 s(s² + 9)
Use the transforms in Fig. 10.1.2 to find the Laplace transforms of the functions in Problems 11 through 22. A preliminary integration by parts may be necessary. f (t) = tet t f(t) t" (n ≥0) g@ (a>−1) eat cos kt sin kt cosh kt sinhkt u(t - a) 13 S n! gn+T F(s) Γ(α +
In Problems 15 through 22, apply either Theorem 2 or Theorem 3 to find the Laplace transform of f (t). f(t) = e³1 31 t -1
Find the Laplace transforms of the functions given in Problems 11 through 22. f(t) = t if t ≤ 1; f(t) = 2-t if 1 ≤ t ≤ 2; f(t) = 0 if t> 2
Find the Laplace transforms of the functions given in Problems 11 through 22. f(t) = t³ if 1 ≤ t ≤ 2; f(t) = 0 ift < 1 or if t > 2
Apply Theorem 2 to find the inverse Laplace transforms of the functions in Problems 17 through 24. F(s): = 1 s(s² - 9)
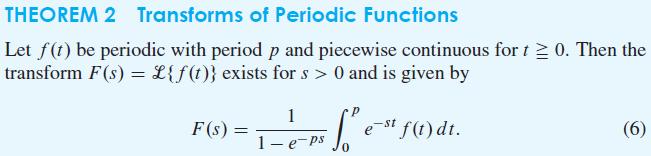
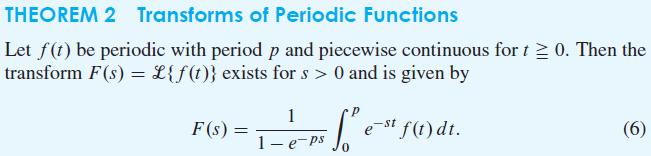
Apply Theorem 2 with p = 1 to verify that ℒ {1} = 1/s. THEOREM 2 Transforms of Periodic Functions Let f(t) be periodic with period p and piecewise continuous for t≥ 0. Then the transform F(s) = L{f(t)} exists for s> 0 and is given by F(s) = = 1 - P₁ [ ² e-²₁ 1- e-ps e-st f(t) dt. (6)
Apply Theorem 2 to find the inverse Laplace transforms of the functions in Problems 17 through 24. F(s) = 1 s² (5²1)
Find the inverse transforms of the functions in Problems 23 through 28. S-2 s+2 F(s) In-
Use the transforms in Fig. 10.1.2 to find the inverse Laplace transforms of the functions in Problems 23 through 32. F(s) = 3 S
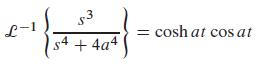
Use the factorizationto derive the inverse Laplace transforms listed in Problems 23 through 26. s4 + 4a4 = (s² - 2as +2a²) (s² + 2as + 2a²) ($2
Apply Theorem 2 to verify that ℒ {cos kt} = s/(s2 + k2). THEOREM 2 Transforms of Periodic Functions Let f(t) be periodic with period p and piecewise continuous for t≥ 0. Then the transform F(s) = L{f(t)} exists for s> 0 and is given by F(s) = = 1 - P₁ [ ² e-²₁ 1- e-ps e-st f(t) dt. (6)
Apply Theorem 2 to find the inverse Laplace transforms of the functions in Problems 17 through 24. F(s) = 1 s(s+ 1)(s + 2)
Find the inverse transforms of the functions in Problems 23 through 28. s²+1 s² +4 F(s) In-
Use the factorizationto derive the inverse Laplace transforms listed in Problems 23 through 26. s4 + 4a4 = (s² - 2as +2a²) (s² + 2as + 2a²) ($2
Use the transforms in Fig. 10.1.2 to find the inverse Laplace transforms of the functions in Problems 23 through 32. F(s) = $-3/2
In Problems 29 through 34, transform the given differential equation to find a nontrivial solution such that x(0) = 0.tx" - (4t + 1) x' + 2(2t + 1)x = 0
Use Laplace transforms to solve the initial value problems in Problems 27 through 38.x(4) + 2x" + x = e2t; x (0) = x' (0) = x"(0) = x(3) (0) = 0
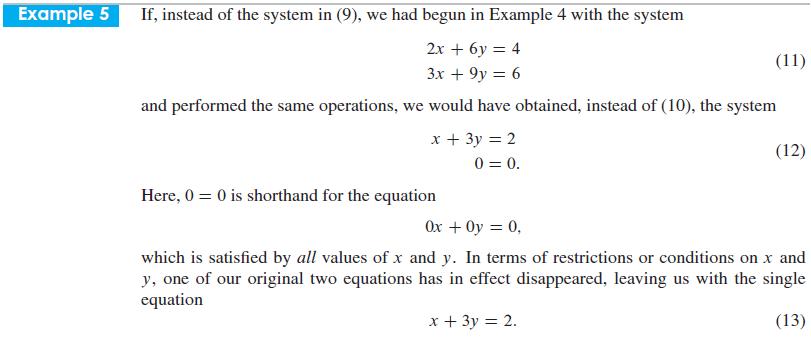
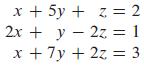
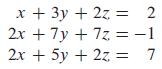
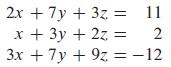
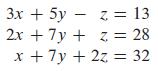
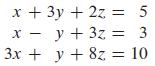
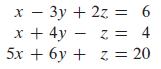
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
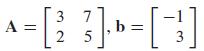
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b. A 37 -1 = [² 3 ]- b = [~ 3 ] , 2 5
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the improved Euler method twice to approximate (to five decimal places) this solution on the given interval, first with step size
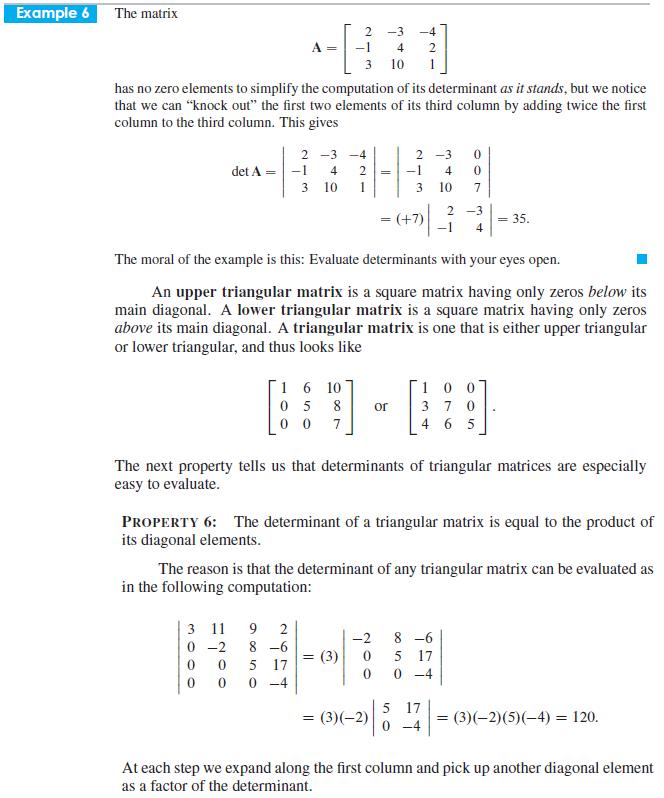
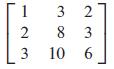
Use cofactor expansions to evaluate the determinants in Problems 1–6. Expand along the row or column that minimizes the amount of computation that is required. 210 121 012
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b. = [$ A = 6 7 } ], b = 5 6 2 -3
In Problems 1–4, two matrices A and B and two numbers c and d are given. Compute the matrix cA + dB. A = 5 0 3 0 7 , B = -4 3 524 2 7 4 = -2, d = 4
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-1, 11) and (2,-10)
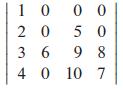
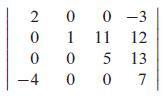
Use cofactor expansions to evaluate the determinants in Problems 1–6. Expand along the row or column that minimizes the amount of computation that is required. 1000 2050 3698 4 0 10 7
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
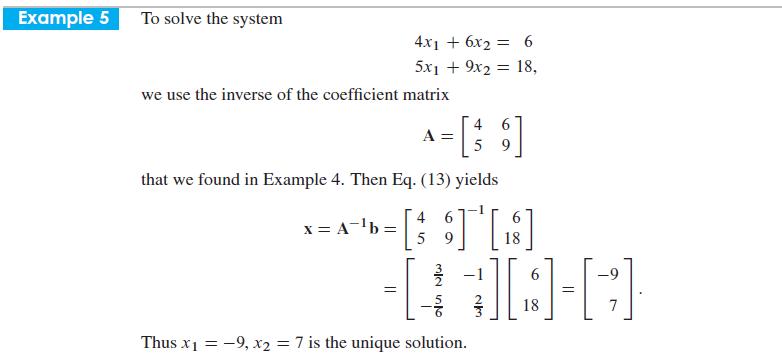
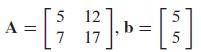
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b.Example 5 A = 5 7 12 17 5 =[$] 5 ‚ b =
In Problems 1–4, two matrices A and B and two numbers c and d are given. Compute the matrix cA + dB. A = 2 -1 4 5 0 0 -3 7 -2 ,B= 6 -3 -4 5 0 21,c7, d = 5 1].c= 9 7
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(0, 3), (1,1) and (2,-5)
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
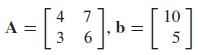
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b. A = 2 5 ² ] ₁b = = [³] , 6 3 54
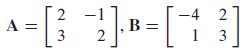
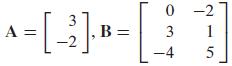
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A 2 -1 -4 = [² -2] B = [- 3 || 2 13
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-1, 1), (1,5), and (2, 16)
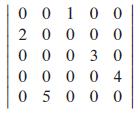
Use cofactor expansions to evaluate the determinants in Problems 1–6. Expand along the row or column that minimizes the amount of computation that is required. 0 0 1 0 0 20000 00030 00004 05000
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b. 10 A x = [ 27 ]-=[ ¹9 ] 4 3 , b: 6 5
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A = 1 0 -3 3 2 2-3 45 ,B= 7 [1 1 0 -4 5 3 3 -2 9
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(1,3), (2, 3), and (3,5)
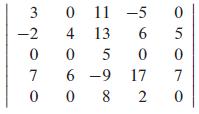
Use cofactor expansions to evaluate the determinants in Problems 1–6. Expand along the row or column that minimizes the amount of computation that is required. 3 -2 0 7 0 0 11 -5 4 13 6 0 0 5 59 6 -9 17 0 8 2 osoto 0 5 0 7 0
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-1,-1), (3, -13), and (5,5)
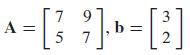
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b. 7 = [3 A = 9 ² ]₁ b = [2] 3 5 7
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A = [1 2 3], B = 345 LS
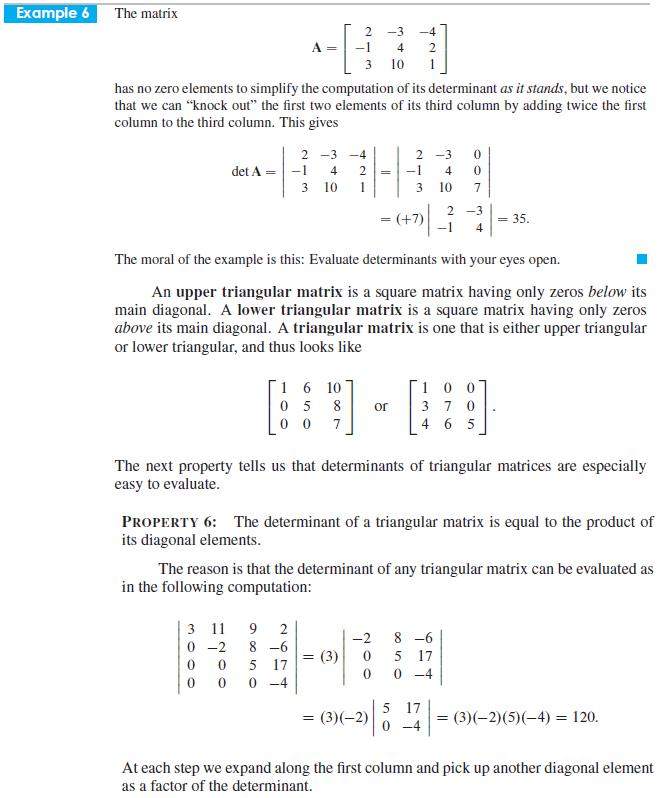
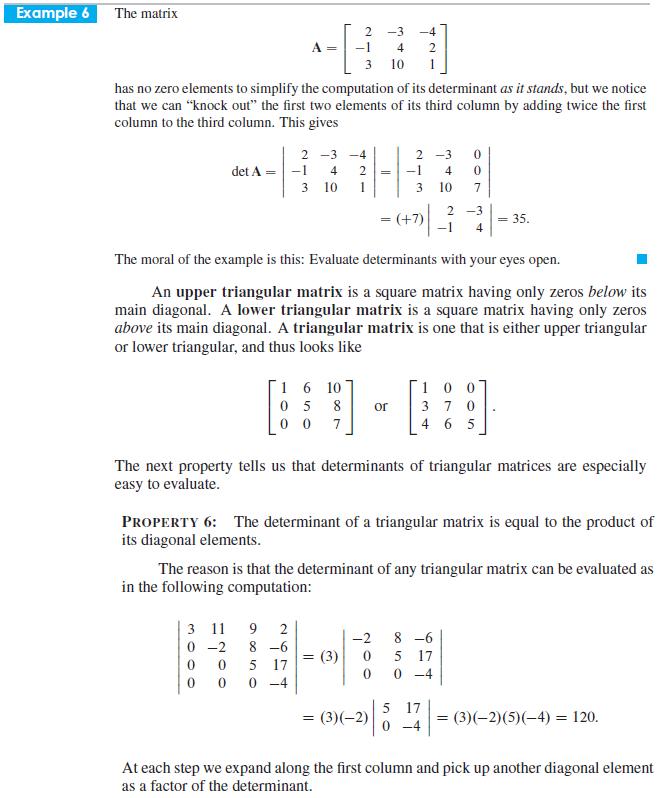
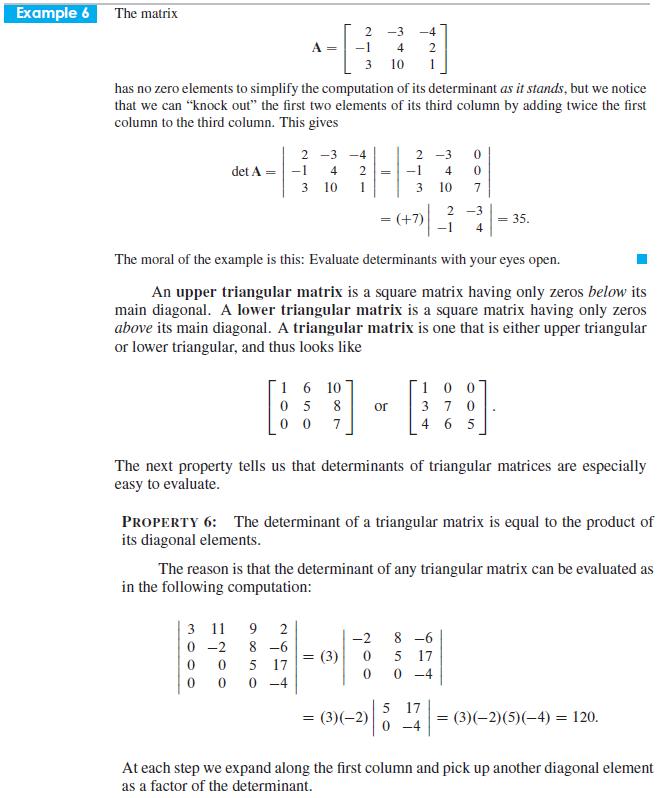
In Problems 7–12, evaluate each given determinant after first simplifying the computation (as in Example 6) by adding an appropriate multiple of some row or column to another. 1 1 1 222 3 3 3
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-1, 1), (0, 0), (1, 1), and (2,-4)
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. 3 A = [2 $ ³]. B 10 2-5 , = 3 - 1 6 45
In Problems 7–12, evaluate each given determinant after first simplifying the computation (as in Example 6) by adding an appropriate multiple of some row or column to another. 2 3 -2 -3 32 4 1 7
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A 3 -2 , B = 0-2 3 1 -4 5 نیا
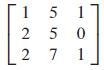
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 5 4 6 5
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-2,-2), (-1,2), (1, 10), and (2,26)
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A = [² 4 } ] ₁ B = [¯ , 3 21 -1 0 3-2 4 45
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 15 1 2 5 50 7 1 27
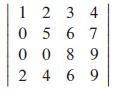
In Problems 7–12, evaluate each given determinant after first simplifying the computation (as in Example 6) by adding an appropriate multiple of some row or column to another. 1 2 3 4 0567 0089 2469
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-1,27), (1, 13), (2, 3), and (3,-25)
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A = [35], B = 2756 -1 -14 2 3
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In Problems 7–12, evaluate each given determinant after first simplifying the computation (as in Example 6) by adding an appropriate multiple of some row or column to another. 2 0 0 1 0 0 -4 0 0 0-3 11 5 0 12 13 7
Three points are given in each of Problems 11–14. Find the equation of the circle determined by these points, as well as its center and radius.(-1,-1), (6, 6), and (7,5)
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 132 8 3 6 2 3 10 10
In Problems 5–12, two matrices A and B are given. Calculate whichever of the matrices AB and BA is defined. A = [1 0 3 -2], B= 2 -7 3 5 9 10
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
Three points are given in each of Problems 11–14. Find the equation of the circle determined by these points, as well as its center and radius.(3,-4), (5, 10), and (-9, 12)
In Problems 13–16, three matrices A, B, and C are given. Verify by computation of both sides the associative law A(BC) = (AB)C. 3 2 5 A = [_1 4] B =[_-3 i].c=[2}] C , -1 -1 3
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 2 7 13 3 7 3 2 9
Use the method of elimination to evaluate the determinants in Problems 13–20. -4 -1 4 -1 -2 14 23 2
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
Three points are given in each of Problems 11–14. Find the equation of the circle determined by these points, as well as its center and radius.(1,0), (0, -5), and (-5,-4)
In Problems 13–16, three matrices A, B, and C are given. Verify by computation of both sides the associative law A(BC) = (AB)C. 25 = [ 3 i]· c = [_ [-] -3 1 A = [2 -1], B=
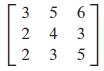
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 3 2 2 5 4 3 35 6 3
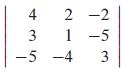
Use the method of elimination to evaluate the determinants in Problems 13–20. 4 435 2-2 1 -5 3 -5 -4
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
In Problems 13–16, three matrices A, B, and C are given. Verify by computation of both sides the associative law A(BC) = (AB)C. A 20 [2] B= [1 −1_2],C=6
Three points are given in each of Problems 11–14. Find the equation of the circle determined by these points, as well as its center and radius.(0, 0), (10,0), and (-7,7)
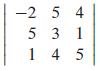
Use the method of elimination to evaluate the determinants in Problems 13–20. -2 5 4 531 14 5
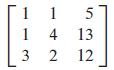
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 11 1 5 1 4 13 2 12 نیا
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
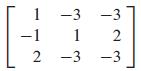
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. L 1 -1 2 -3 1 -3 -3 2 -3
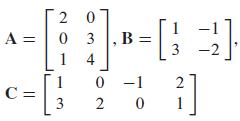
In Problems 13–16, three matrices A, B, and C are given. Verify by computation of both sides the associative law A(BC) = (AB)C. A = C= 2 0 1 3 0 3, B 4 02 = [13 0 -1 0 2 -2 ]
In Problems 15–18, find an equation of the central ellipse that passes through the three given points.(0,5), (5,0), and (5,5)
Use the method of elimination to evaluate the determinants in Problems 13–20. 254 2 4-2 ㅜㅜ -5 -4 -1 -4 2 1
In Problems 15–18, find an equation of the central ellipse that passes through the three given points.(0,5), (5,0), and (10,10)
In Problems 17–22, first write each given homogeneous system in the matrix form Ax = 0. Then find the solution in vector form, as in Eq. (9).x1 - 5x3 + 4x4 = 0x2 + 2x3 - 7x4 = 0 x = s(3, 4, 1,0) +(2, -3, 0, 1) = 8x₁ + 1x2. (9)
Use the method of elimination to evaluate the determinants in Problems 13–20. 34 32 -3 -1 -4 0 2ㅇ2ㅇ
Showing 500 - 600
of 2513
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Last
Step by Step Answers