New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
first course differential equations
Differential Equations And Linear Algebra 4th Edition C. Edwards, David Penney, David Calvis - Solutions
In Problems 1–8, determine whether or not the given vectors in Rn form a basis for Rn.v1 = (1 , 7 , -3) , v2 = (2 , 1 , 4) , v3 = (6 , 5 , 1) , v4 = (0 , 7 , 13)
In Problems 1–8, determine whether or not the given vectors in Rn form a basis for Rn.v1 = (3 , -1 , 2), v2 = (6 , -2 , 4) , v3 = (5 , 3 , -1)
In Problems 1–8, determine whether or not the given vectors in Rn form a basis for Rn.v1 = (4 , 7) , v2 = (5 , 6)
Deduce from Theorem 3 in Section 4.3 that the rank of the matrix A is the largest integer r such that A has a nonsingular r x r submatrix. THEOREM 3 Equality of Row Rank and Column Rank The row rank and column rank of any matrix are equal.
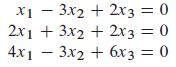
Given a homogeneous system Ax = 0 of (scalar) linear equations, we say that a subset of these equations is irredundant provided that the corresponding column vectors of the transpose AT are linearly independent. In Problems 21–24, extract from each given system a maximal subset of
Given a homogeneous system Ax = 0 of (scalar) linear equations, we say that a subset of these equations is irredundant provided that the corresponding column vectors of the transpose AT are linearly independent. In Problems 21–24, extract from each given system a maximal subset of
Let S = {v1 , v2 , .... , vk} be a basis for the subspace W of Rn. Then a basis T for Rn that contains S can be found by applying the method of Example 5 to the vectorsv1 , v2 , ...... , vk , e1 , e 2, ...... , en.Do this in Problems 17–20.Find a basis T for R4 that contains the vectors v1
In Problems 13–16, a set S of vectors in R4 is given. Find a subset of S that forms a basis for the subspace of R4 spanned by S.v1 = (3 , 2 , 2 , 2) , v2 = (2 , 1 , 2 , 1) , v3 = (4 , 3 , 2 , 3), v4 = (1 , 2 , 3 , 4)
Let S = {v1 , v2 , .... , vk} be a basis for the subspace W of Rn. Then a basis T for Rn that contains S can be found by applying the method of Example 5 to the vectorsv1 , v2 , ......, vk , e1 , e2 , ......, en.Do this in Problems 17–20.Find a basis T for R4
In Problems 13–16, a set S of vectors in R4 is given. Find a subset of S that forms a basis for the subspace of R4 spanned by S.v1 = (1 , -1 , 2 , 3) , v2 = (2 , 3 , 4 , 1) , v3 = (1 , 1 , 2 , 1) , v4 = (4 , 1 , 8 , 7)
In Problems 13–16, a set S of vectors in R4 is given. Find a subset of S that forms a basis for the subspace of R4 spanned by S.v1 = (1 , 3 , -2 , 4) , v2 = (2 , -1 , 3 , 2) , v3 = (5 , 1 , 4 , 8)
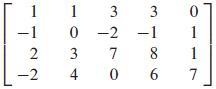
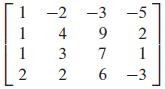
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 113 0-2 -1 3 7 8 406 3 -1 2 -2 0 1 1 7
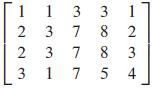
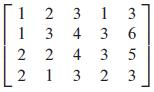
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 1 3 3 2 3 7 8 237 7 8 1754 1 2 3 3
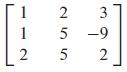
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 1 L2 255 3. 5 -9 2
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 5 2 4 21 1 4 15
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 2 1 3 2 2 4 3 2 1 3 2 313 4 3 6 5 3
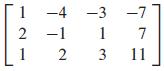
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. -4 -3 -77 1 2 -1 12 3 نیا 7 11
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 2 3453 3778
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 1 2 2432 พ -3 m ON-O 52 -3
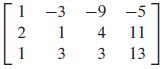
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 -3 -9-5 2 1 1 3 نیا 4 3 نیا 11 13
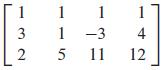
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 1 1 3 1 -3 11 32 2 5 1 4 12
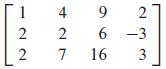
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 4 2 2 2 7 9 2 6 -3 3 16
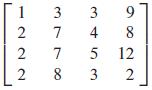
In Problems 1–12, find both a basis for the row space and a basis for the column space of the given matrix A. 1 1 4 1 3 نا لا 2 5 -1 5 3 4 7 16 13 23
In Problems 33–36, show that the given set V is not a subspace of R3.V is the set of all (x , y , z) such that xyz = 1.
In Problems 33–36, show that the given set V is not a subspace of R3.V is the set of all (x , y , z) such that z ≥ 0.
In Problems 33–36, show that the given set V is not a subspace of R3.V is the set of all (x , y , z) such that x + y + z = 3.
In Problems 33–36, show that the given set V is not a subspace of R3.V is the set of all (x , y , z) such that y = 1.
In Problems 25–28, express the vector t as a linear combination of the vectors u, v, and w.t = (5 , 30 , -21) , u = (5 , 2 , -2) , v = (1 , 5 , -3) , w = (5 , -3 , 4)
In Problems 25–28, express the vector t as a linear combination of the vectors u, v, and w.t = (2 , -7 , 9) , u = (1 , -2 , 2) , v = (3 , 0 , 1) , w = (1 , -1 , 2)
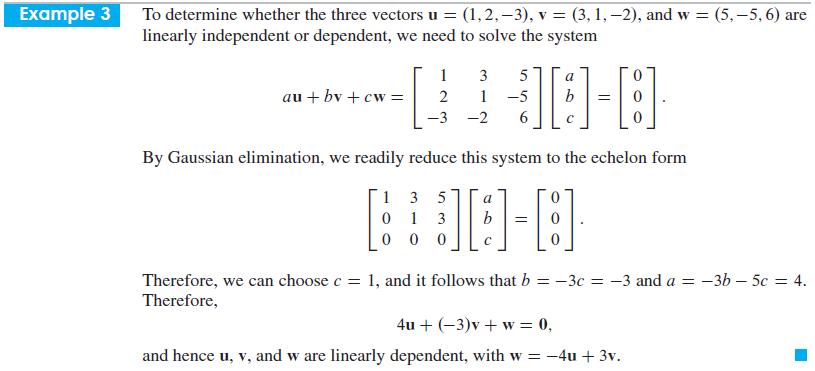
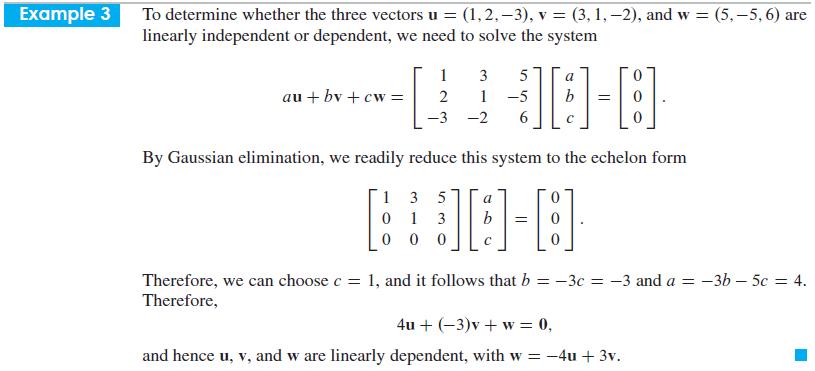
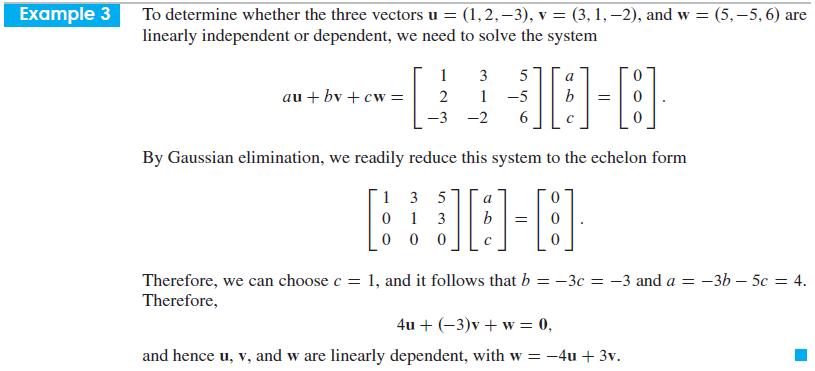
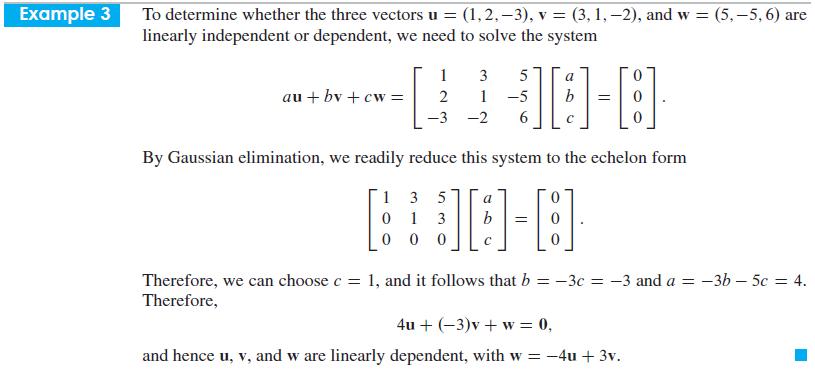
In Problems 19–24, use the method of Example 3 to determine whether the given vectors u, v, and w are linearly independent or dependent. If they are linearly dependent, find scalars a, b, and c not all zero such that au + bv + cw = 0.u = (1 , 4 , 5) , v = (4 , 2 , 5) , w = (-3 , 3 , -1) Example
In Problems 19–24, use the method of Example 3 to determine whether the given vectors u, v, and w are linearly independent or dependent. If they are linearly dependent, find scalars a, b, and c not all zero such that au + bv + cw = 0.u = (1 , 1 , -2) , v = (-2 , -1 , 6) , w = (3 , 7 , 2) Example
In Problems 19–24, use the method of Example 3 to determine whether the given vectors u, v, and w are linearly independent or dependent. If they are linearly dependent, find scalars a, b, and c not all zero such that au + bv + cw = 0.u = (5 , 5 , 4) , v = (2 , 3 , 1) , w = (4 ,1 , 5) Example 3 To
In Problems 19–24, use the method of Example 3 to determine whether the given vectors u, v, and w are linearly independent or dependent. If they are linearly dependent, find scalars a, b, and c not all zero such that au + bv + cw = 0.u = (2 ,0 , 1) , v = (-3 , 1 , -1), w = (0 , -2 , -1) Example
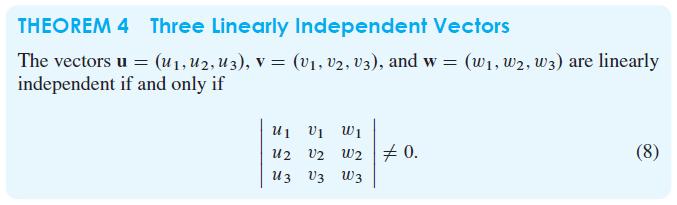
In Problems 15–18, apply Theorem 4 (that is, calculate a determinant) to determine whether the given vectors u, v, and w are linearly dependent or independent.u = (3 , -1 , 2) , v = (5 , 4 , -6) , w = (8 , 3 , -4) THEOREM 4 Three Linearly Independent Vectors The vectors u = (₁, U2, U3), V =
In Problems 9–14, express w as a linear combination of u and v.u = (5 , -2) , v = (-6 , 4) , w = (5 , 6)
In Problems 9–14, express w as a linear combination of u and v.u = (7 , 5) , v = (3 , 4) , w = (5 , -2)
In Problems 9–14, express w as a linear combination of u and v.u = (4 , 1) , v = (-2 , -1) , w = (2 , -2)
In Problems 9–14, express w as a linear combination of u and v.u = (5 , 7) , v = (2 , 3) , w = (1 , 1)
In Problems 9–14, express w as a linear combination of u and v.u = (3 , 4) , v = (2 , 3) , w = (0 , -1)
In Problems 9–14, express w as a linear combination of u and v.u = (1 , -2), v = (-1 , 3), w = (1 , 0)
In Problems 5–8, determine whether the given vectors u and v are linearly dependent or linearly independent.u = (2 , -2), v = (-2 , 2)
In Problems 5–8, determine whether the given vectors u and v are linearly dependent or linearly independent.u = (2 , 2), v = (2 , -2)
In Problems 5–8, determine whether the given vectors u and v are linearly dependent or linearly independent.u = (0 , 2), v = (3 , 0)
In Problems 5–8, determine whether the given vectors u and v are linearly dependent or linearly independent.u = (0 , 2), v = (0 , 3)
In Problems 1–4, find |a - b|, 2a + b, and 3a - 4b.a = (-1 , 0 , 2), b = (3 , 4 , -5)
In Problems 1–4, find |a - b|, 2a + b, and 3a - 4b.a = (2 , 5 , -4), b = (1 , -2 , -3)
Let V be the vector space of Problem 29 and let the subset W consist of those elements {xn) of V such that Xn = Xn-1 + Xn-2 for n ≥ 2. Thus a typical element of W is the Fibonacci sequence(a) Show that W is a subspace of V.(b) Prove that W is 2-dimensional.Problem 29Let V be the set of all
In Problems 19–22, use the method of Example 5 to find the constants A, B, and C in the indicated partial-fraction decompositions. 8 x(x² + 4) A Bx + C + x x²+4
In Problems 19–22, use the method of Example 5 to find the constants A, B, and C in the indicated partial-fraction decompositions. 2 x(x² - 1) X + B x-1 + C x + 1
In Problems 13–18, determine whether the given functions are linearly independent.ex and xex
In Problems 13–18, determine whether the given functions are linearly independent.sin x and cos x
In Problems 9–12, a condition on the coefficients of a polynomial a0 + a1x + a2x2 + a3x3 is given. Determine whether or not the set of all such polynomials satisfying this condition is a subspace of the space of all polynomials.a3 ≠ 0 P
In Problems 5–8, determine whether or not each indicated set of functions is a subspace of the space of all real-valued functions on R.The set of all f such that f (-x) = - f (x) for all x.
In Problems 5–8, determine whether or not each indicated set of functions is a subspace of the space of all real-valued functions on R.The set of all f such that f (0) = 0 and f (1) = 1.
In Problems 5–8, determine whether or not each indicated set of functions is a subspace of the space of all real-valued functions on R.The set of all f such that f (x) ≠ 0 for all x.
In Problems 5–8, determine whether or not each indicated set of functions is a subspace of the space of all real-valued functions on R.The set of all f such that f (0) = 0
In Problems 1–4, determine whether or not the indicated set of 3 x 3 matrices is a subspace of M33.The set of all singular 3 x 3 matrices.
In Problems 1–4, determine whether or not the indicated set of 3 x 3 matrices is a subspace of M33.The set of all nonsingular 3 x 3 matrices.
In Problems 1–4, determine whether or not the indicated set of 3 x 3 matrices is a subspace of M33.The set of all symmetric 3 x 3 matrices (that is, matrices A = [aij ] such that aij = aji for 1 ≤ i ≤ 3, 1 ≤ j ≤ 3).
In Problems 1–4, determine whether or not the indicated set of 3 x 3 matrices is a subspace of M33.The set of all diagonal 3 x 3 matrices.
Take the positive sign in Eq. (20), and then use the standard integralto derive the same general solution y(x) = A cosh x + B sinh x given in Eq. (22). S du /u²+1 2 sinh1u+C
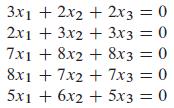
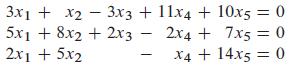
In Problems 15–26, find a basis for the solution space of the given homogeneous linear system. 3x3 + 11x4 + 10x5 = 0 2x4 + 7x5 = 0 X4 + 14x5 = 0 3x1 + x2 5x1 + 8x2 + 2x3 2x1 + 5x2
In Problems 1 through 20, find a particular solution yp of the given equation. In all these problems, primes denote derivatives with respect to x.y″ + 16y = e3x
Determine the period and frequency of the simple harmonic motion of a 4-kg mass on the end of a spring with spring constant 16 N/m.
Problems 1 through 6, show directly that the given functions are linearly dependent on the real line. That is, find a nontrivial linear combination of the given functions that vanishes identically.f(x) = 2x , g(x) = 3x2 , h(x) = 5x - 8x2
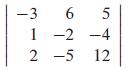
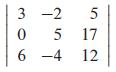
In Problems 7–12, evaluate each given determinant after first simplifying the computation (as in Example 6) by adding an appropriate multiple of some row or column to another. -3 6 1-2-4 2 -5 12 5
In Problems 9–22, use the method of Example 7 to find the inverse A-1 of each given matrix A. 5 7 4 6
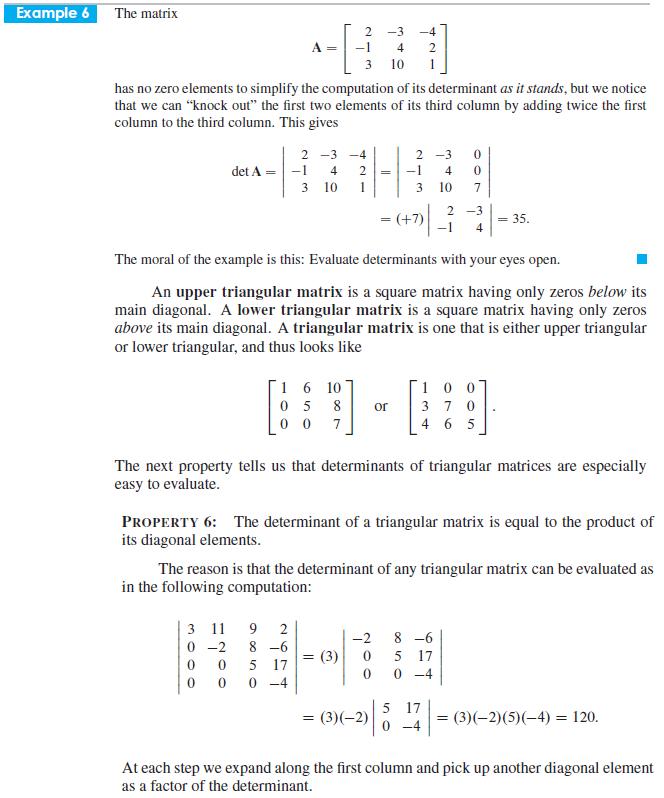
In Problems 7–12, evaluate each given determinant after first simplifying the computation (as in Example 6) by adding an appropriate multiple of some row or column to another. 3-2 0 5 6 -4 5 17 12
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(-1,3), (0,5), (1,7), and (2, 3)
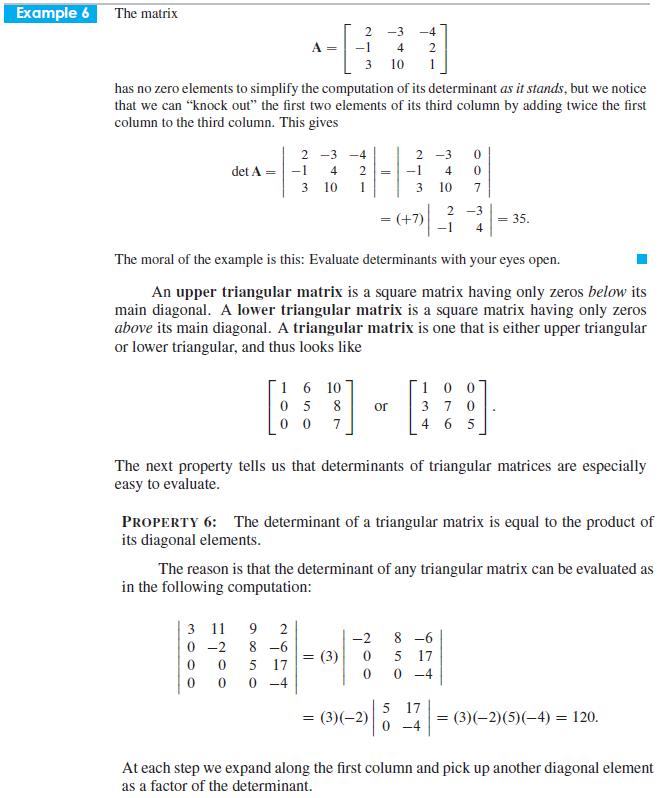
In Problems 9–20, use the information given about the angle θ, 0 ≤ θ < 2π, to find the exact value of: 5 11 11 3-2 0 0 0 4 8 7 6 23 0-3 0 17
In each of Problems 1–10, n + 1 data points are given. Find the nth degree polynomial y = f (x) that fits these points.(1, 1) and (3,7)
Use cofactor expansions to evaluate the determinants in Problems 1–6. Expand along the row or column that minimizes the amount of computation that is required. 003 400 050
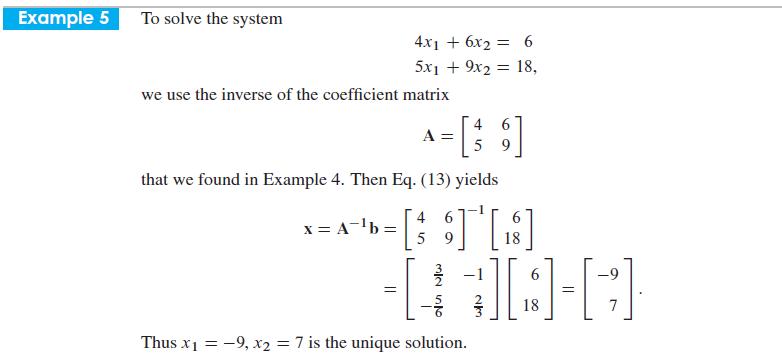
In Problems 1–8, first apply the formulas in (9) to find A-1. Then use A-1 (as in Example 5) to solve the system Ax = b.Example 5 3 - [³ A = 3² ], b = [ 8 5 6 4 3
In Problems 1–4, two matrices A and B and two numbers c and d are given. Compute the matrix cA + dB. 3 -1 A = [2 -²] - [ 2 ]
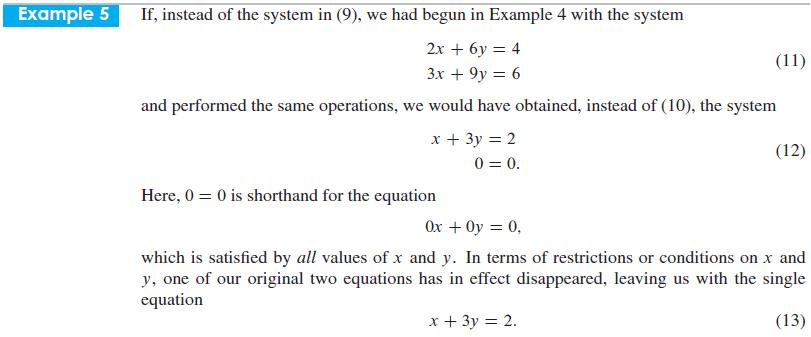
In each of Problems 1–22, use the method of elimination to determine whether the given linear system is consistent or inconsistent. For each consistent system, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter t (as in Examples 5
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the Runge–Kutta method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the improved Euler method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the improved Euler method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the Runge–Kutta method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the improved Euler method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the Runge–Kutta method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the improved Euler method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the Runge–Kutta method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the improved Euler method twice to approximate (to five decimal places) this solution on the given interval, first with step size
A programmable calculator or a computer will be useful for Problems 11 through 16. In each problem find the exact solution of the given initial value problem. Then apply the Runge–Kutta method twice to approximate (to five decimal places) this solution on the given interval, first with step size
Use Eqs. (10) and (11) to show that v(t)2 - v20 = 2a[x(t) - x0] for all t when the acceleration a = dv/dt is constant. Then use this “kinematic formula”—commonly presented in introductory physics courses—to confirm the result of Example 2.Equations (10 & 11) = dx dt = at + vo- (10)
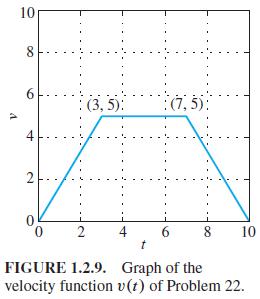
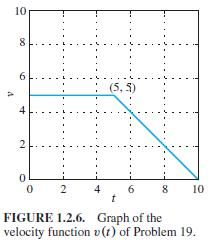
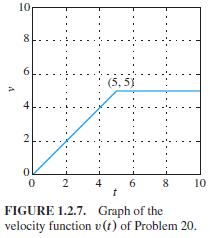
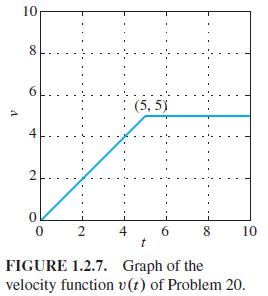
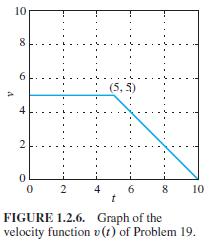
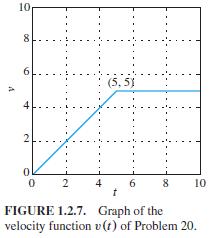
In Problems 19 through 22, a particle starts at the origin and travels along the x-axis with the velocity function v(t) whose graph is shown in Figs. 1.2.6 through 1.2.9. Sketch the graph of the resulting position function x(t) for 0 ≦ t ≦ 10.Figs. 1.2.6 through 1.2.9 10 8 6 4 2 : (3,5): (7,5):
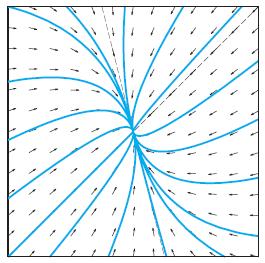
In Problems 21 and 22, first use the method of Example 2 to construct a slope field for the given differential equation. Then sketch the solution curve corresponding to the given initial condition. Finally, use this solution curve to estimate the desired value of the solution y(x).y' = x + y, y(0)
Find general solutions of the differential equations in Problems 1 through 30. Primes denote derivatives with respect to x throughout.y2y' + 2xy3 = 6x
In Problems 19 through 22, a particle starts at the origin and travels along the x-axis with the velocity function v(t) whose graph is shown in Figs. 1.2.6 through 1.2.9. Sketch the graph of the resulting position function x(t) for 0 ≦ t ≦ 10.Figs. 1.2.6 through 1.2.9 A 10 8 6 4 2 0 0
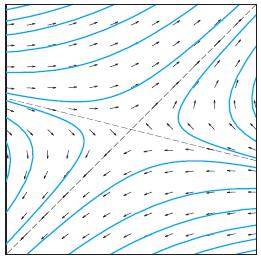
The phase portraits in Problems 17 through 28 correspond to linear systems of the form x' = Ax in which the matrix A has two linearly independent eigenvectors. Determine the nature of the eigenvalues and eigenvectors of each system. For example, you may discern that the system has pure imaginary
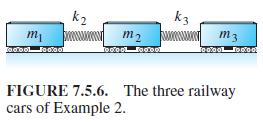
In the three-railway-car system of Fig. 7.5.6, suppose that cars 1 and 3 each weigh 32 tons, that car 2 weighs 8 tons, and that each spring constant is 4 tons/ft. If x'1 (0) = v0 and x'2 (0) = x'3 (0) = 0, show that the two springs are compressed until t = π/2 and thatthereafter. Thus car 1
In Problems 17 through 25, the eigenvalues of the coefficient matrix can be found by inspection and factoring. Apply the eigenvalue method to find a general solution of each system. 2x1 + x2-x3, x₂ = -4x1 - 3x2 - X3, x3 4x1 + 4x2 + 2x3 =
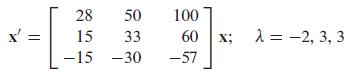
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful.
The phase portraits in Problems 17 through 28 correspond to linear systems of the form x' = Ax in which the matrix A has two linearly independent eigenvectors. Determine the nature of the eigenvalues and eigenvectors of each system. For example, you may discern that the system has pure imaginary
In Problems 17 through 25, the eigenvalues of the coefficient matrix can be found by inspection and factoring. Apply the eigenvalue method to find a general solution of each system. = x₁ = 5x₁ + 5x2 + 2x3, x₂ = -6x16x25x3, x3 6x1 + 6x2 + 5x3
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 15: x1 (0) = 5, x2 (0) = -3Data from in Problem 15 3 x = [ = 3] xx = e [ 1 ] - x = e [] X; X1 5 -3
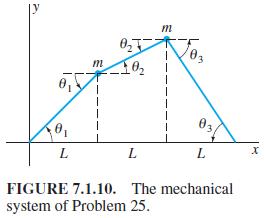
Two particles each of mass m are attached to a string under (constant) tension T , as indicated in Fig. 7.1.10. Assume that the particles oscillate vertically (that is, parallel to the y-axis) with amplitudes so small that the sines of the angles shown are accurately approximated by their tangents.
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 16: x1 (0) = 11, x2 (0) = -7Data from In problem 16 4 x = [ - 2 ] = e [ _ ] X = ( [ -2] X; e3t - -2 X2 e2t
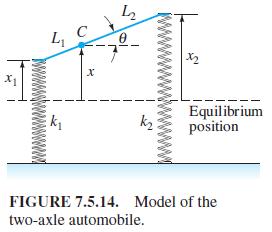
Suppose that k1 = k2 = k and L1 = L2 = 1/2L in Fig. 7.5.14 (the symmetric situation). Then show that every free oscillation is a combination of a vertical oscillation with frequencyand an angular oscillation with frequency 2k/m = Im
Showing 1000 - 1100
of 2513
First
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Last
Step by Step Answers