New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
mathematics
first course differential equations
Differential Equations And Linear Algebra 4th Edition C. Edwards, David Penney, David Calvis - Solutions
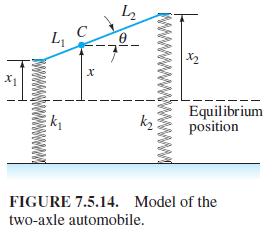
Suppose that m = 75 slugs (the car weighs 2400 lb), L1 = 7 ft, L2 = 3 ft (it's a rear-engine car), k1 = k2 = 2000 lb/ft, and I = 1000 ft-lb-s2. Then the equations in (40) take the form(a) Find the two natural frequencies ω1 and ω2 of the car.(b) Now suppose that the car is driven at a speed of v
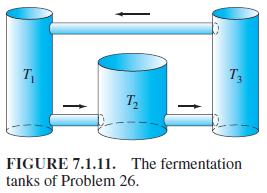
Three 100-gal fermentation vats are connected as indicated in Fig. 7.1.11, and the mixtures in each tank are kept uniform by stirring. Denote by xi(t) the amount (in pounds) of alcohol in tank Ti at time t (i = 1, 2, 3). Suppose that the mixture circulates between the tanks at the rate of 10
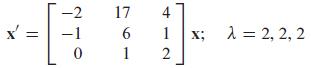
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. || -2 -1 0 17
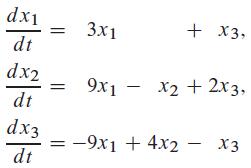
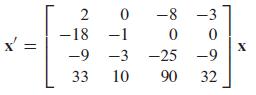
Find the particular solution of the systemthat satisfies the initial conditions x1 (0) = 0, x2(0) = 0, x3 (0) = 17. dx1 dt dx2 dt dx3 dt 3x1 + x3, 9x1x2 + 2x3, = -9x1 + 4x2 - X3
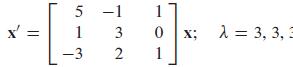
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. 5 1 -3 -1 3 2 1 0 X; 1 A
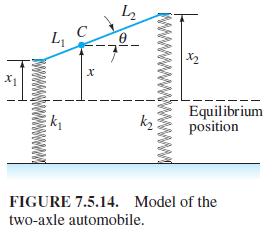
In Problems 27 through 29, the system of Fig. 7.5.14 is taken as a model for an undamped car with the given parameters in fps units.(a) Find the two natural frequencies of oscillation (in hertz).(b) Assume that this car is driven along a sinusoidal washboard surface with a wavelength of 40 ft. Find
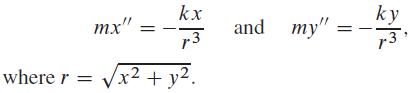
A particle of mass m moves in the plane with coordinates (x (t), y(t)) under the influence of a force that is directed toward the origin and has magnitude k/(x2 + y2) - an inverse-square central force field. Show that where r = kx -3 √x² + y². mx" and my" ky
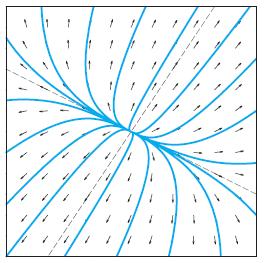
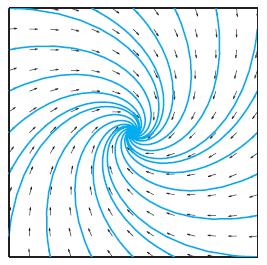
The phase portraits in Problems 17 through 28 correspond to linear systems of the form x' = Ax in which the matrix A has two linearly independent eigenvectors. Determine the nature of the eigenvalues and eigenvectors of each system. For example, you may discern that the system has pure imaginary
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 17: x1 (0) = 8, x2 (0) = 0Data from in Problem 17 4-3 x = [ ] M = [2] x = [ 36 3e21 6 -7 X1 e-St x2 3e-St
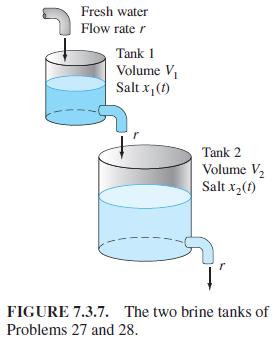
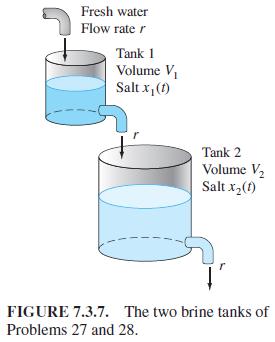
The amounts x1(t) and x2(t) of salt in the two brine tanks of Fig. 7.3.7 satisfy the differential equationswhere ki = r/Vi for i = 1, 2. In Problems 27 and 28 the volumes V1 and V2 are given. First solve for x1 (t) and x2(1), assuming that r = 10 (gal/min), x1 (0) = 15 (lb), and x2 (0) = 0. Then
The amounts x1(t) and x2(t) of salt in the two brine tanks of Fig. 7.3.7 satisfy the differential equationswhere ki = r/Vi for i = 1, 2. In Problems 27 and 28 the volumes V1 and V2 are given. First solve for x1 (t) and x2(1), assuming that r = 10 (gal/min), x1 (0) = 15 (lb), and x2 (0) = 0. Then
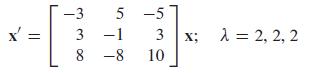
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. X: || -3 5 -5 -1 3 8-8
In Problems 27 through 29, the system of Fig. 7.5.14 is taken as a model for an undamped car with the given parameters in fps units.(a) Find the two natural frequencies of oscillation (in hertz).(b) Assume that this car is driven along a sinusoidal washboard surface with a wavelength of 40 ft. Find
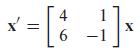
We can give a simpler description of the general solutionof the systemin Example 1 by introducing the oblique uv-coordinate system indicated in Fig. 7.4.17, in which the u- and v-axes are determined by the eigenvectors v1 = [-1 6] and v2 [1 1] , respectively.The uv-coordinate functions u(t) and
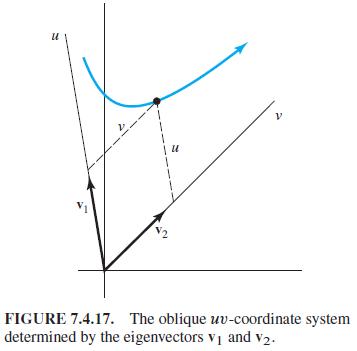
Suppose that a projectile of mass m moves in a vertical plane in the atmosphere near the surface of the earth under the influence of two forces: a downward gravitational force FG of magnitude mg, and a resistive force FR that is directed opposite to the velocity vector v and has magnitude kv2
The phase portraits in Problems 17 through 28 correspond to linear systems of the form x' = Ax in which the matrix A has two linearly independent eigenvectors. Determine the nature of the eigenvalues and eigenvectors of each system. For example, you may discern that the system has pure imaginary
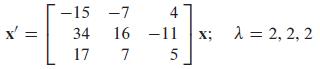
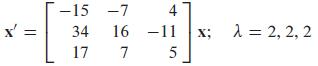
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. x = = -15 -7 4 34 16
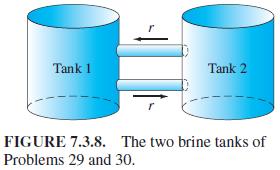
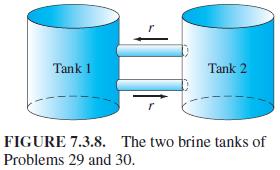
The amounts x1(t) and x2(t) of salt in the two brine tanks of Fig. 7.3.8 satisfy the differential equationswhere ki = r/ Vi as usual. In Problems 29 and 30, solve for x1 (t) and x2 (t), assuming that r = 10 (gal/min), x1 (0) = 15 (lb), and x2 (0) = 0. Then construct a figure showing the graphs of
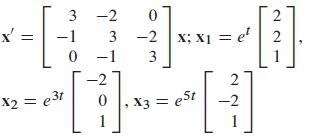
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 18: x1 (0) = 0, x2 (0) = 0, x3 (0) = 4Data from in Problem 18 x || 3 X2 = e3t -2 0 3 -2 X; X1 = et 3 -1 0-1 -2 [1] X3 = eSt 2 -2
Suppose that a particle with mass m and electrical charge q moves in the xy-plane under the influence of the magnetic field B = Bk (thus a uniform field parallel to the z - axis), so the force on the particle is F = qv x B if its velocity is v. Show that the equations of motion of the particle are
The amounts x1(t) and x2(t) of salt in the two brine tanks of Fig. 7.3.8 satisfy the differential equationswhere ki = r/ Vi as usual. In Problems 29 and 30, solve for x1 (t) and x2 (t), assuming that r = 10 (gal/min), x1 (0) = 15 (lb), and x2 (0) = 0. Then construct a figure showing the graphs of
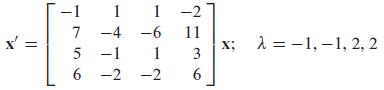
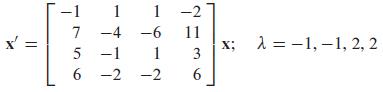
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. x = -1 -1 1 1-2 1 7
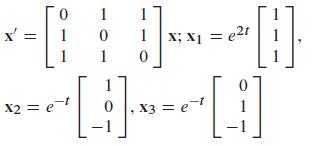
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 19: x1 (0) = 10, x2(0) = 12, x3 (0) = -1Data from in Problem 19 x' = 0 1 X2 = e-t 1 0 1 1 0 , X; X1 = = et X3 = et 0
Problems 35–37 show that all nontrivial solution curves of the system in Example 11 are ellipses rotated by the same angle as the trajectory in Fig. 7.4.11.The system in Example 11 can be rewritten in scalar form asleading to the first-order differential equationor, in differential form,Verify
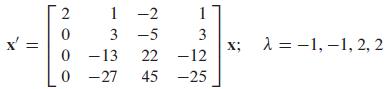
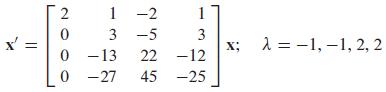
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. x' = 1 3 0-13 22 -12 0-27
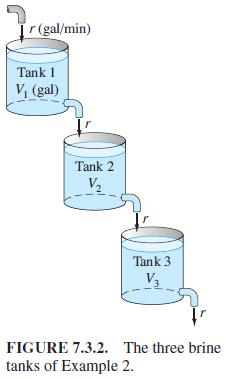
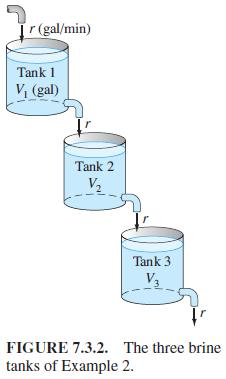
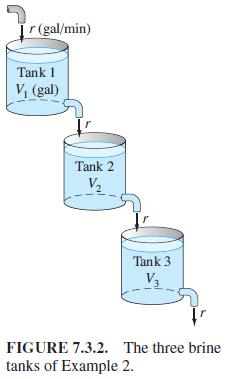
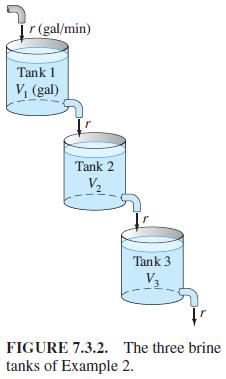
Problems 31 through 34 deal with the open three-tank system of Fig. 7.3.2. Fresh water flows into tank 1; mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and out of tank 3; all at the given flow rate r gallons per minute. The initial amounts x1 (0) = x0 (lb), x2 (0) = 0, and x3
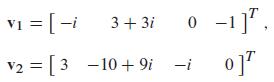
The characteristic equation of the coefficient matrix A of the systemisTherefore, A has the repeated complex conjugate pair 3 ± 4i of eigenvalues. First show that the complex vectorsform a length 2 chain {v1, v2} associated with the eigenvalue λ = 3 - 4i . Then calculate the real and imaginary
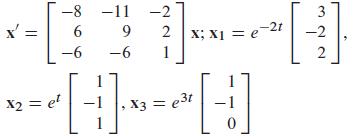
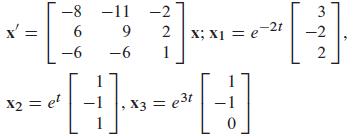
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 21: x1 (0) = 1, x2 (0) = 2, x3 (0) = 3 x' = -8-11-2 9 -6 6 -6 2 X; X1 = e 2t 1 ---[-]-~=~[-] X3 = e3t X2 et 0 3 -2 2
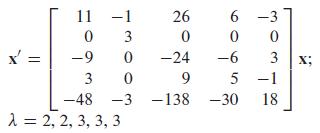
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. 11 0 -9 -1 3 0 -24 9 3
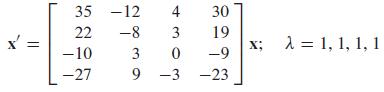
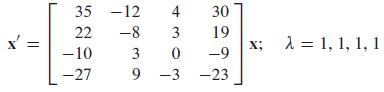
In Problems 23 through 32 the eigenvalues of the coefficient matrix A are given. Find a general solution of the indicated system x' = Ax. Especially in Problems 29 through 32, use of a computer algebra system (as in the application material for this section) may be useful. x 35 -12 4 22 -8 3 -10 3
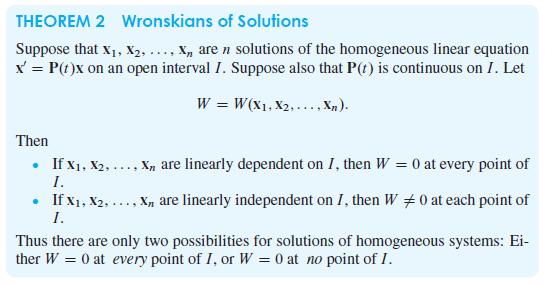
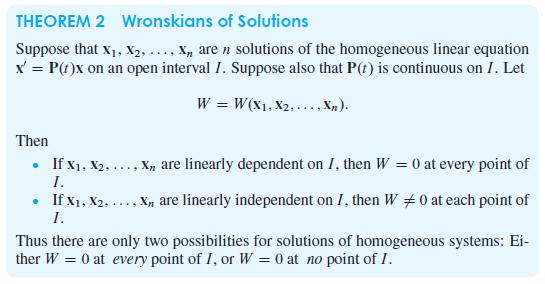
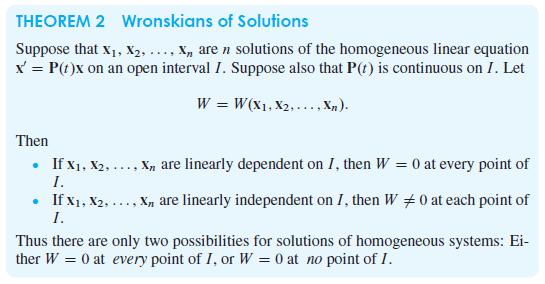
(a) Show that the vector functionsare linearly independent on the real line.(b) Why does it follow from Theorem 2 that there is no continuous matrix P(t) such that x1 and x2 are both solutions of x' = P(t)x? (0) = [, 2] X₁ and X2 1² 3
Use the chain rule for vector-valued functions to verify the principle of time reversal.
Problems 31 through 34 deal with the open three-tank system of Fig. 7.3.2. Fresh water flows into tank 1; mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and out of tank 3; all at the given flow rate r gallons per minute. The initial amounts x1 (0) = x0 (lb), x2 (0) = 0, and x3
Verify Eq. (53) by substituting the expressions for x1(t) and x2 (t) from Eq. (51) into Eq. (52) and simplifying. x₁ (t) = 4 cos 10t - sin 10t, x2 (t) = 2 cos 10t + 2 sin 10t. (51)
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 21: x1 (0) = 5, x2(0) = -7, x3 (0) = 11 x' = -8-11-2 9 -6 6 -6 2 X; X1 = e 2t 1 ---[-]-~=~[-] X3 = e3t X2 et 0 3 -2 2
Problems 31 through 34 deal with the open three-tank system of Fig. 7.3.2. Fresh water flows into tank 1; mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and out of tank 3; all at the given flow rate r gallons per minute. The initial amounts x1 (0) = x0 (lb), x2 (0) = 0, and x3
The characteristic equation of the coefficient matrix A of the systemisTherefore, A has the repeated complex conjugate pair 2 ± 3i of eigenvalues. First show that the complex vectorsform a length 2 chain {v1, v2} associated with the eigenvalue λ = 2 + 3i . Then calculate (as in Problem 33) four
In Problems 31–33 A represents a 2 x 2 matrix.(a) Show that if A has the repeated eigenvalue λ with two linearly independent associated eigenvectors, then every nonzero vector v is an eigenvector of A.(b) Conclude that A must be given by Eq. (22). (In the equation Av = λv take v = [1 0]T
In Problems 31–33 A represents a 2 x 2 matrix.Use the definitions of eigenvalue and eigenvector (Section 7.3) to prove that if λ is an eigenvalue of A with associated eigenvector v, then -λ is an eigenvalue of the matrix -A with associated eigenvector v. Conclude that if A has positive
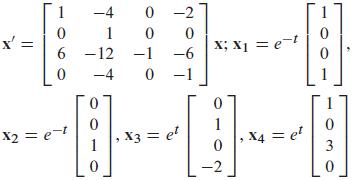
In Problems 23 through 32, find a particular solution of the indicated linear system that satisfies the given initial conditions.The system of Problem 22: x1 (0) = x2(0) = x3 (0) = x4 (0) = 1Data from in problem 22 X': || 0 6 0 x2 = e-t -4 1 0-2 0 0 -12 -1 -6 -4 0 -1 81 0 , X3 = et X; X = e-t 1 J].
Suppose that one of the vector functionsis a constant multiple of the other on the open interval I. Show that their Wronskian W(t) = I[xij (t)]I must vanish identically on I. This proves part (a) of Theorem 2 in the case n = 2. X₁ (t) = X11 (1) x21(1) and x₂ (1) = X12 (1) X22 (1)
Problems 31 through 34 deal with the open three-tank system of Fig. 7.3.2. Fresh water flows into tank 1; mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and out of tank 3; all at the given flow rate r gallons per minute. The initial amounts x1 (0) = x0 (lb), x2 (0) = 0, and x3
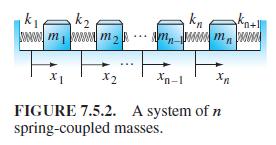
Find the position functions x1(t) and x2(t) of the railway cars of Fig. 7.5.2 if the physical parameters are given byand the initial conditions areHow far do the cars travel before stopping? m₁ = m₂ = C₁ = C₂ = c = k = 1
In Problems 31–33 A represents a 2 x 2 matrix.Show that the system x' = Ax has constant solutions other than x(t) Ξ 0 if and only if there exists a (constant) vector x ≠ 0 with Ax = 0. (It is shown in linear algebra that such a vector x exists exactly when det(A) = 0.)
Suppose that the vectors x1 (1) and x2 (1) of Problem 34 are solutions of the equation x' = P(t)x, where the 2 x 2 matrix P(t) is continuous on the open interval I. Show that if there exists a point a of I at which their Wronskian W(a) is zero, then there exist numbers c and c not both zero such
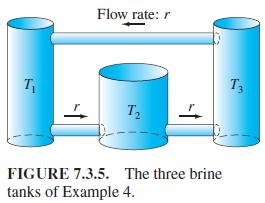
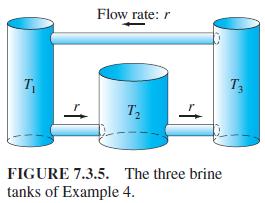
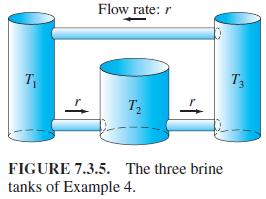
Problems 35 through 37 deal with the closed three-tank sys- tem of Fig. 7.3.5, which is described by the equations in (24). Mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and from tank 3 into tank 1, all at the given flow rate r gallons per minute. The initial amounts x1 (0) =
Problems 35–37 show that all nontrivial solution curves of the system in Example 11 are ellipses rotated by the same angle as the trajectory in Fig. 7.4.11.In analytic geometry it is shown that the general quadratic equationrepresents an ellipse centered at the origin if and only if Ak > 0 and
Problems 35 through 37 deal with the closed three-tank sys- tem of Fig. 7.3.5, which is described by the equations in (24). Mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and from tank 3 into tank 1, all at the given flow rate r gallons per minute. The initial amounts x1 (0) =
Problems 35–37 show that all nontrivial solution curves of the system in Example 11 are ellipses rotated by the same angle as the trajectory in Fig. 7.4.11.It can be further shown that Eq. (65) represents in general a conic section rotated by the angle θ given byShow that this formula applied to
Problems 35 through 37 deal with the closed three-tank sys- tem of Fig. 7.3.5, which is described by the equations in (24). Mixed brine flows from tank 1 into tank 2, from tank 2 into tank 3, and from tank 3 into tank 1, all at the given flow rate r gallons per minute. The initial amounts x1 (0) =
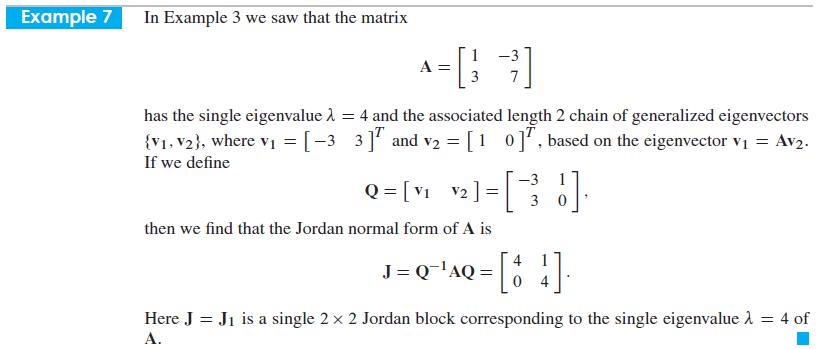
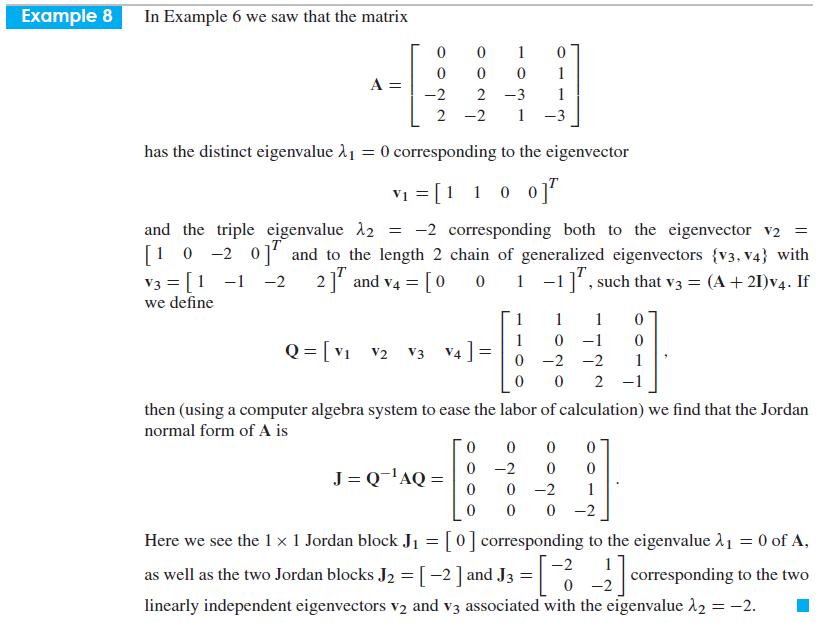
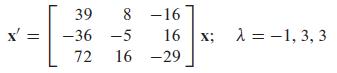
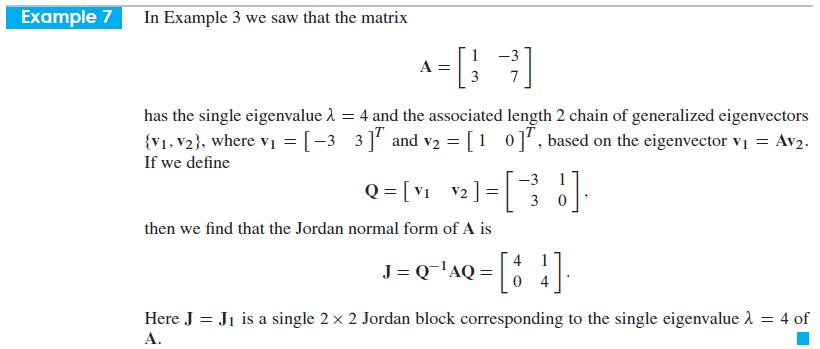
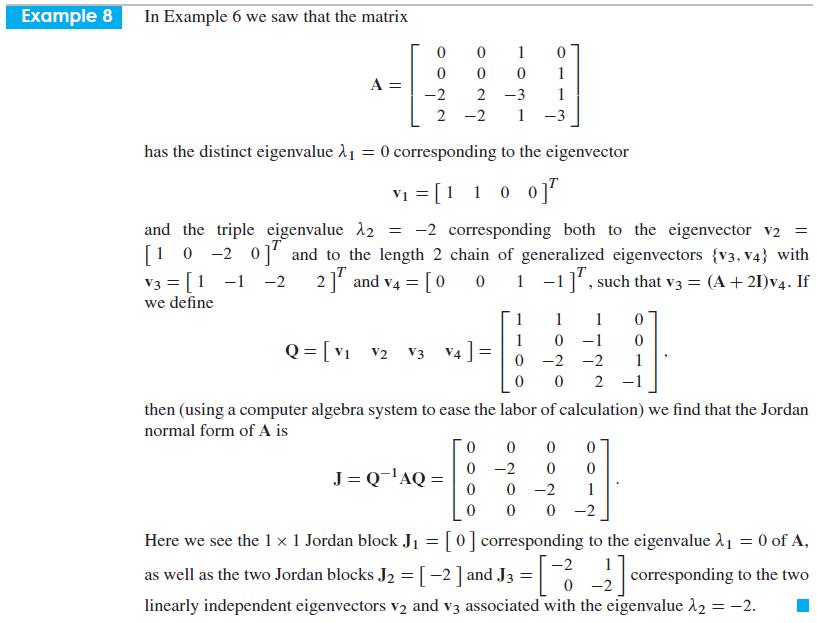
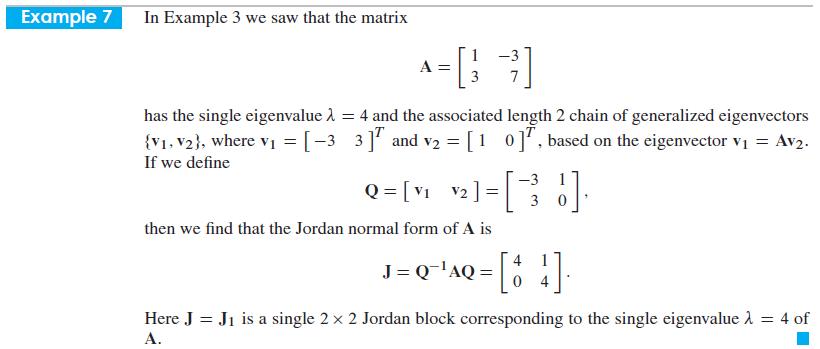
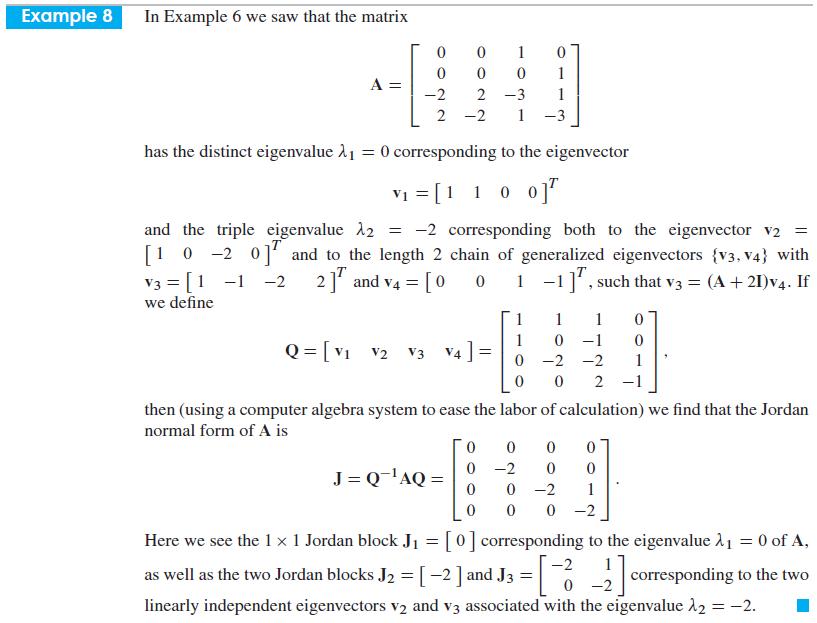
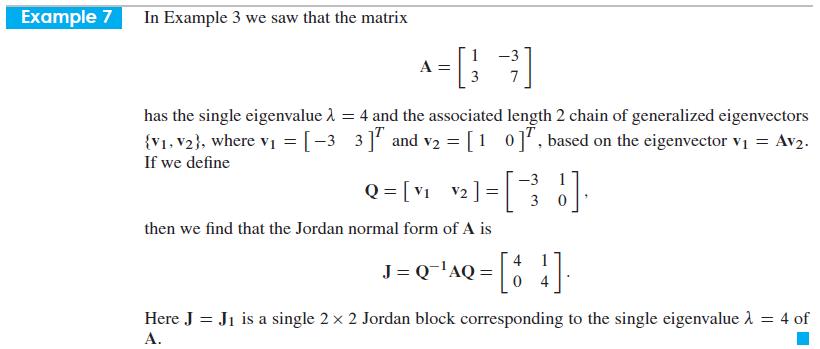
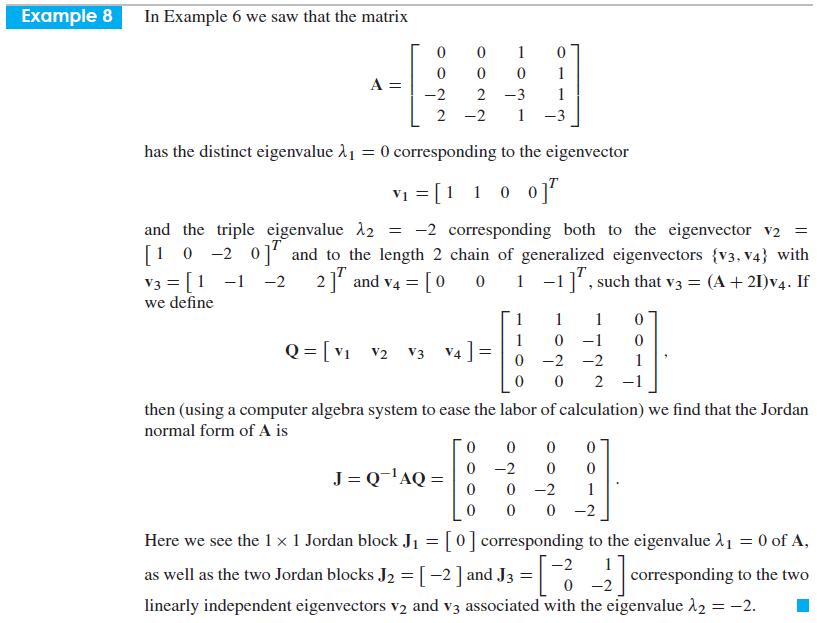
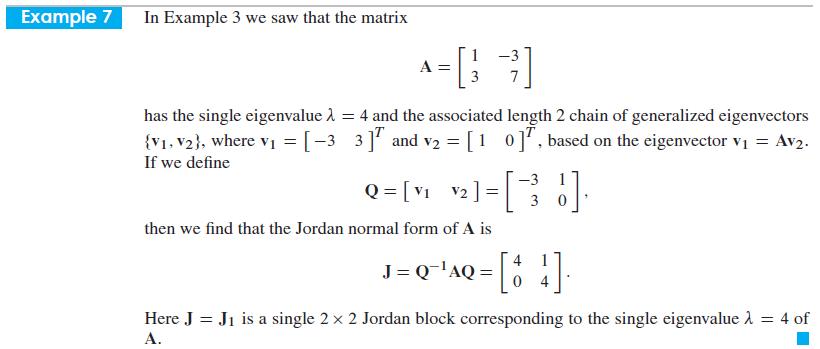
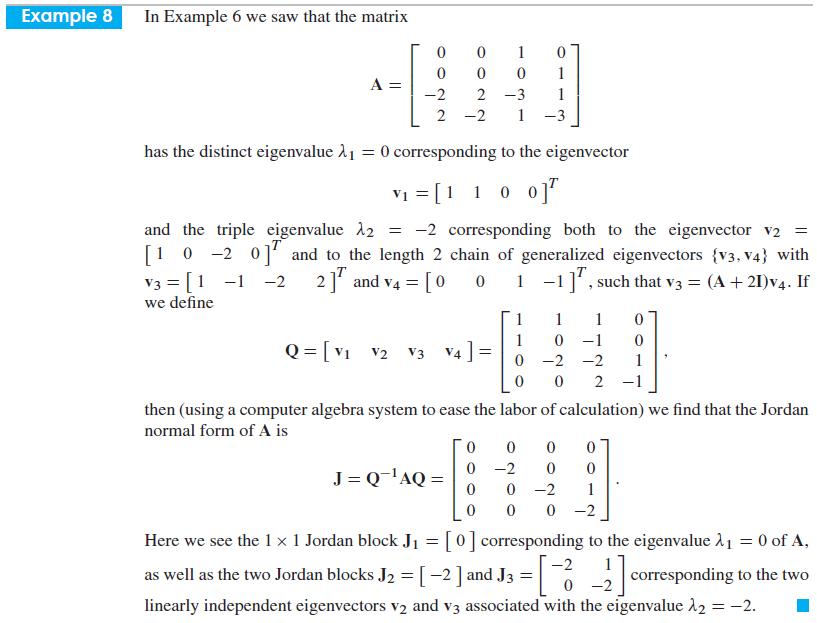
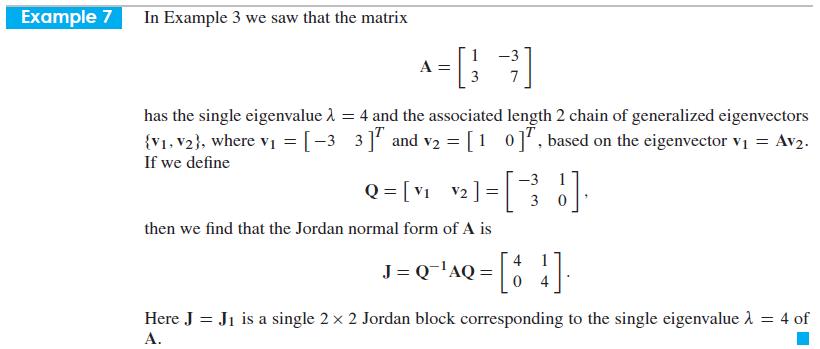
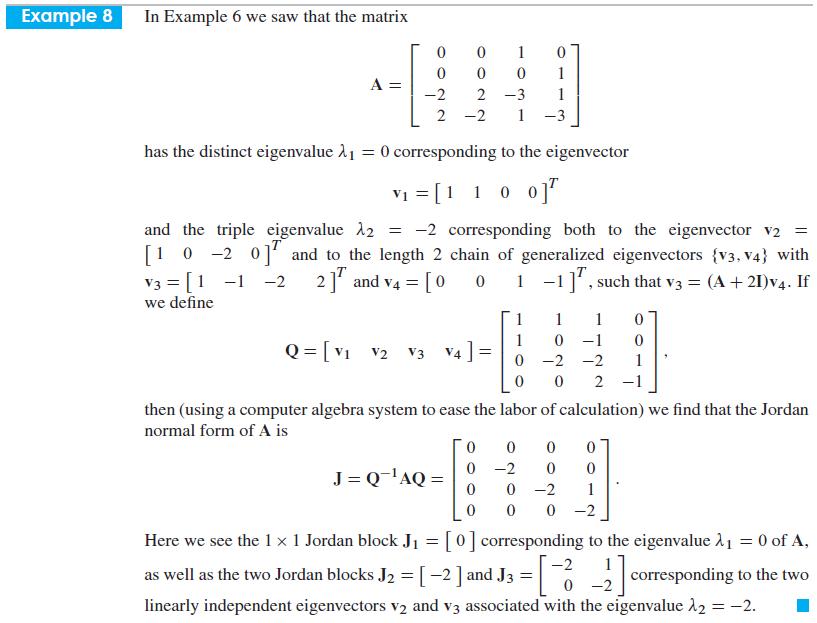
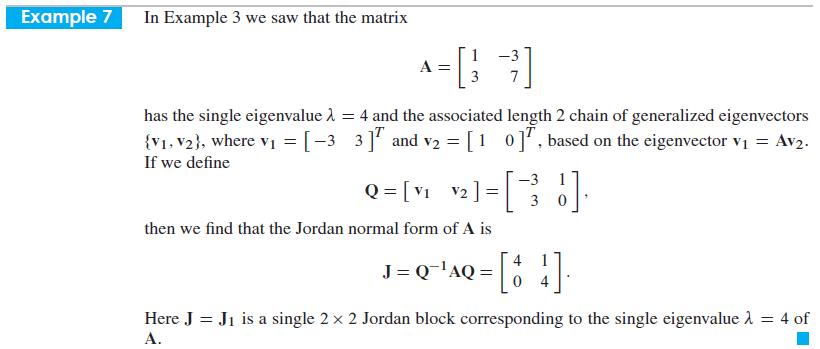
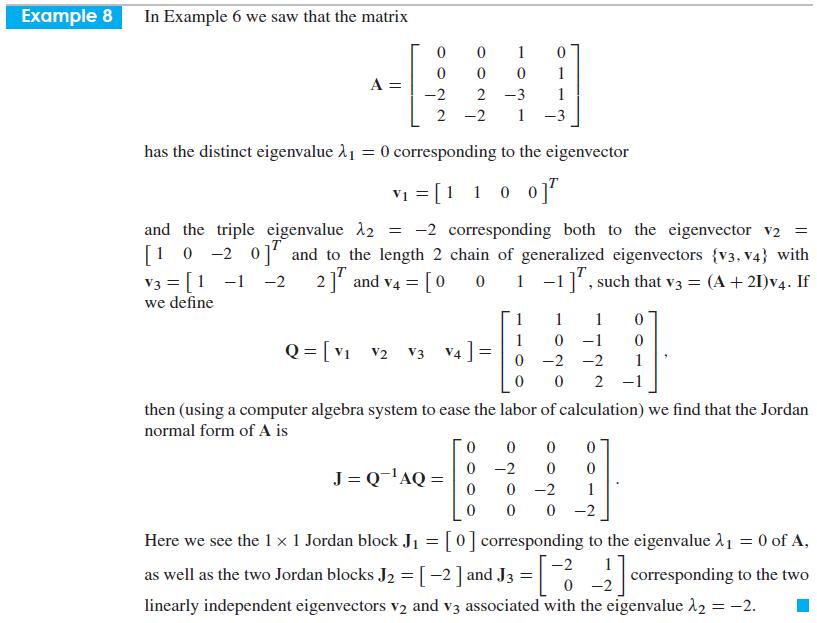
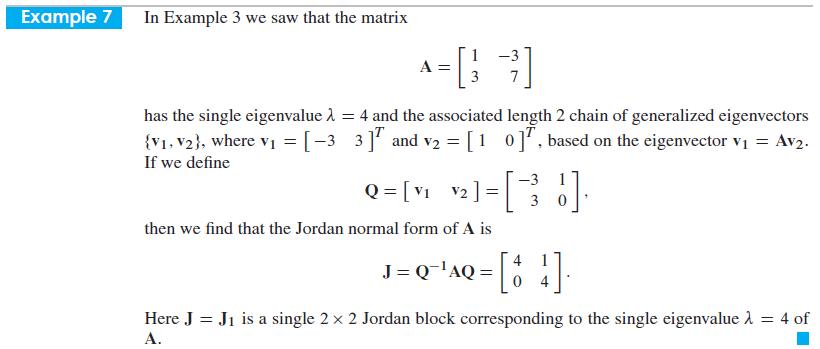
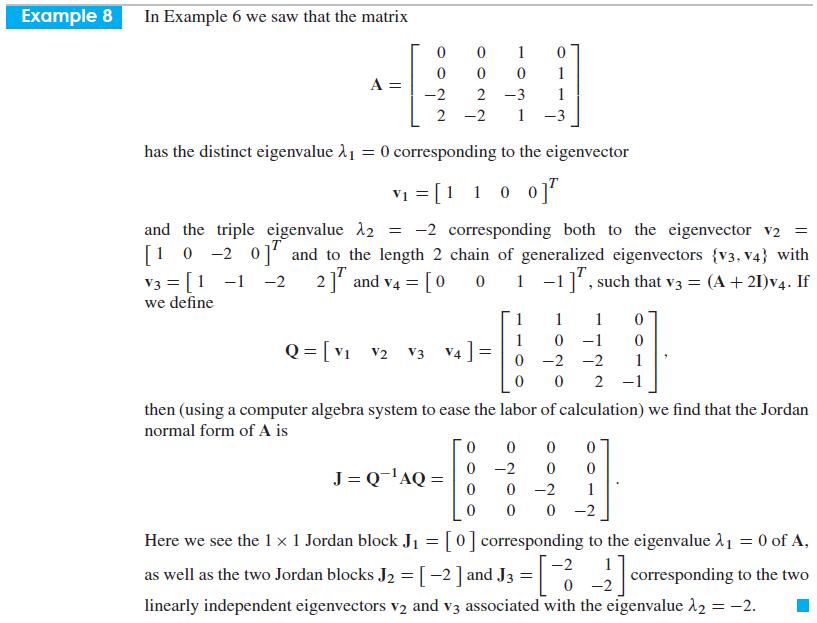
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Let A denote the 2 x 2 matrix(a) Show that the characteristic equation of A (Eq. (3), Section 6.1) is given by(b) Suppose that the eigenvalues of A are pure imaginary. Show that the trace T (A) = a +d of A must be zero and that the determinant D(A) = ad - bc must be positive. Conclude that c ≠ 0.
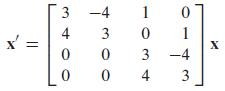
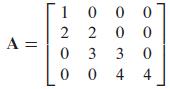
For each matrix A given in Problems 38 through 40, the zeros in the matrix make its characteristic polynomial easy to calculate. Find the general solution of x' = Ax. A = 1000 2 2 03 00 00 30 4 4
Let x1 (t), x2(t), ..., Xn (t) be vector functions whose ith components (for some fixed i) xi1 (1), xi2(t), ..., xin (t) are linearly independent real-valued functions. Conclude that the vector functions are themselves linearly independent.
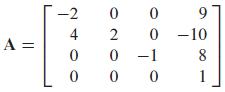
For each matrix A given in Problems 38 through 40, the zeros in the matrix make its characteristic polynomial easy to calculate. Find the general solution of x' = Ax. A: -2 0 4 2 0 0 0 0 0 0 -1 0 9 -10 8 1
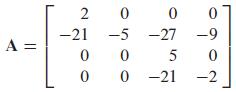
For each matrix A given in Problems 38 through 40, the zeros in the matrix make its characteristic polynomial easy to calculate. Find the general solution of x' = Ax. A = = 2 -21 0 0 0 0 -5 -27 0 5 0 -21 0 -9 0 -2
Use the eigenvalue/eigenvector method to confirm the solution in Eq. (61) of the initial value problem in Eq. (59).
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20Problem 3 x = 3x1 + 4x2, x = 3x1 + 2x2; x1(0) = x2(0) = 1
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 4 x = 4x + x, x = 6x1-x2
Find a fundamental matrix of each of the systems in Problems 1 through 8, then apply Eq. (8) to find a solution satisfying the given initial conditions. x(t) = Φ(t)Φ(0) xo. = (8)
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = 4x + y + et, y' = 6x - y - et
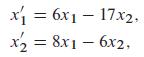
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 5 x = 6x17x2, x = x1-2x2
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = 6x - 7y + 10, y' = x - 2y -
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = 9x + y + 2et, y'= - 8x - 2y +
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 7 x = 3x1 + 4x2, x = 6x15x2
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 8 x = x - 5x, x = x1 - x x1 x2
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = x - 5y + 2 sin t, y' = x - y -
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 9 x = = 2x15x2, x = 4x12x2; x1 (0) = 2, x2 (0) = 3
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = x - 5y + cos 2t, y' = x - y
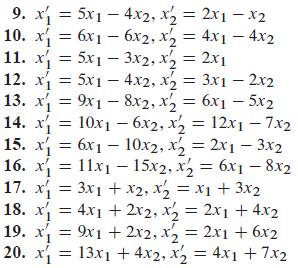
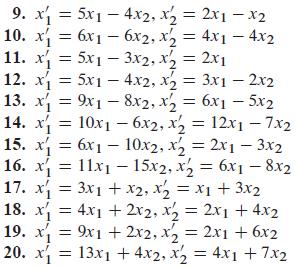
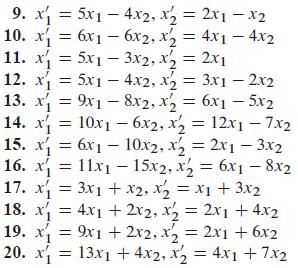
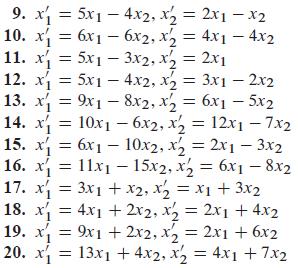
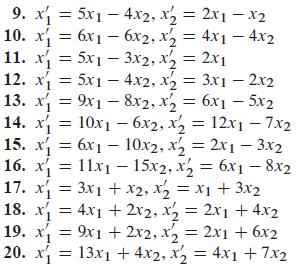
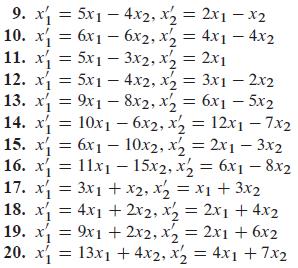
Compute the matrix exponential eAt for each system x' = Ax given in Problems 9 through 20.x'1 = 5x1 - 4x2, x'2 = 2x1 - x2Data in Problem 9 through 20 9. x = 5x14x2, x = 2x1-x2 x = 4x14x2 10. x = 6x16x2, x/2 11. x = 5x13x2, x = 2x1 12. x = 5x1 - 4x2, x = 3x1 - 2x2 13. x = 9x18x2, x = 6x1 - 5x2 14. x
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 12 x = x5x2, x = x + 3x
Compute the matrix exponential eAt for each system x' = Ax given in Problems 9 through 20.x'1 = 5x1 - 4x2, x'2 = 3x1 - 2x2Data in Problem 9 through 20 9. x = 5x14x2, x = 2x1-x2 x = 4x14x2 10. x = 6x16x2, x/2 11. x = 5x13x2, x = 2x1 12. x = 5x1 - 4x2, x = 3x1 - 2x2 13. x = 9x18x2, x = 6x1 - 5x2 14.
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 13 x = 5x19x2, x = 2x1-x2
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 17 x = 4x + x2 + 4x3, x = x + 7x + x3, x3 = 4x1 + x2 + 4x3
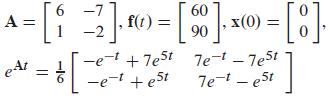
In Problems 17 through 34, use the method of variation of parameters (and perhaps a computer algebra system) to solve the initial value problemIn each problem we provide the matrix exponential eAt as provided by a computer algebra system. x = Ax+ f(t), x(a) = Xa.
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 11 x = x - 2x2, x = 2x1 + x2; x (0) = 0, x2 (0) = 4
Compute the matrix exponential eAt for each system x' = Ax given in Problems 9 through 20.x'1 = 3x1 + x2, x'2 = x1 + 3x2Data in Problem 9 through 20 9. x = 5x14x2, x = 2x1-x2 x = 4x14x2 10. x = 6x16x2, x/2 11. x = 5x13x2, x = 2x1 12. x = 5x1 - 4x2, x = 3x1 - 2x2 13. x = 9x18x2, x = 6x1 - 5x2 14. x
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 10 =-3x12x2, x = 9x1 + 3x2 x =
Compute the matrix exponential eAt for each system x' = Ax given in Problems 9 through 20.x'1 = 9x1 - 8x2, x'2 = 6x1 - 5x2Data in Problem 9 through 20 9. x = 5x14x2, x = 2x1-x2 x = 4x14x2 10. x = 6x16x2, x/2 11. x = 5x13x2, x = 2x1 12. x = 5x1 - 4x2, x = 3x1 - 2x2 13. x = 9x18x2, x = 6x1 - 5x2 14.
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = 2x + y + 2et, y' = x + 2y - 3et
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = x + y + 2t, y' = x + y - 2t
Compute the matrix exponential eAt for each system x' = Ax given in Problems 9 through 20.x'1 = 5x1 - 3x2, x'2 = 2x1Data in Problem 9 through 20 9. x = 5x14x2, x = 2x1-x2 x = 4x14x2 10. x = 6x16x2, x/2 11. x = 5x13x2, x = 2x1 12. x = 5x1 - 4x2, x = 3x1 - 2x2 13. x = 9x18x2, x = 6x1 - 5x2 14. x =
Compute the matrix exponential eAt for each system x' = Ax given in Problems 9 through 20.x'1 = 6x1 - 6x2, x'2 = 4x1 - 4x2Data in Problem 9 through 20 9. x = 5x14x2, x = 2x1-x2 x = 4x14x2 10. x = 6x16x2, x/2 11. x = 5x13x2, x = 2x1 12. x = 5x1 - 4x2, x = 3x1 - 2x2 13. x = 9x18x2, x = 6x1 - 5x2 14.
Find a fundamental matrix of each of the systems in Problems 1 through 8, then apply Eq. (8) to find a solution satisfying the given initial conditions. x(t) = Φ(t)Φ(0) xo. = (8)
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = x - 2y, y' = 2x - y + et sin t
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Find a fundamental matrix of each of the systems in Problems 1 through 8, then apply Eq. (8) to find a solution satisfying the given initial conditions. x(t) = Φ(t)Φ(0) xo. = (8)
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 2 x = x2 2x1 + 3x2, x = 2x1 + x2
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Use projection matrices to find a fundamental matrix solution x(t) = eAt of each of the linear systems x' = Ax given in Problems 1 through 20.Problem 1 x = x + 2x2, x = 2x + x
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Apply the method of undetermined coefficients to find a particular solution of each of the systems in Problems 1 through 14. If initial conditions are given, find the particular solution that satisfies these conditions. Primes denote derivatives with respect to t.x' = -3x + 4y + sin t, y' = 6x -
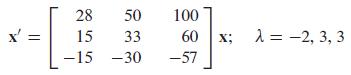
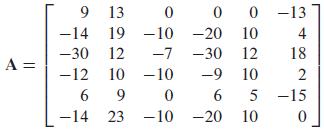
In Problems 42 through 50, use a calculator or computer system to calculate the eigenvalues and eigenvectors in order to find a general solution of the linear system x' = Ax with the given coefficient matrix A. A = 9 13 0 -14 19-10-20 -30 12 -7 -12 10 -10 6 9 0 -14 23 -10 -20 10 0 0 10 12 -9 10 6
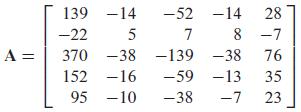
In Problems 42 through 50, use a calculator or computer system to calculate the eigenvalues and eigenvectors in order to find a general solution of the linear system x' = Ax with the given coefficient matrix A. A = 139-14 -22 -52 -14 28 7 8-7 76 35 -7 23 5 370-38-139 152 -16 95 -10 -38 -38 -59 -13
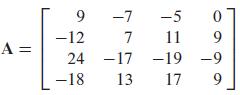
In Problems 42 through 50, use a calculator or computer system to calculate the eigenvalues and eigenvectors in order to find a general solution of the linear system x' = Ax with the given coefficient matrix A. A = 9 -12 24 -18 -7 7 -17 13 -5 11 -19 17 9 -9 9
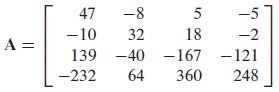
In Problems 42 through 50, use a calculator or computer system to calculate the eigenvalues and eigenvectors in order to find a general solution of the linear system x' = Ax with the given coefficient matrix A. A = -8 32 47 -10 139 -40 -167 360 1 5 18 -232 64 -5 -2 -121 248
Use the method of Examples 7 and 8 to find the Jordan normal form J of each coefficient matrix A given in Problems 23 through 32 (respectively). Example 7 In Example 3 we saw that the matrix ^=[03] A 7 = has the single eigenvalue > {V₁, V2), where V₁ = [-3 If we define 4 and the associated
Showing 1100 - 1200
of 2513
First
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Last
Step by Step Answers