New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
chemical engineering
Process Dynamics And Control 2nd Edition Dale E. Seborg, Thomas F. Edgar, Duncan A. Mellich - Solutions
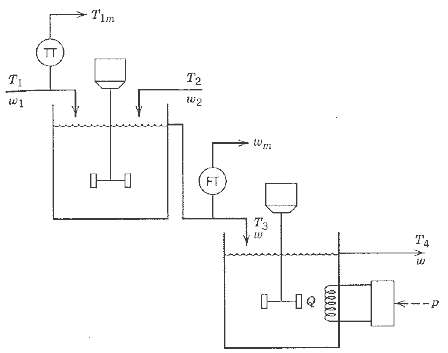
A feedforward control system is to be designed for the two-tank heating system shown in Fig. The design objective is to regulate temperature 74, despite variations in disturbance variables T1 and w. The voltage signal to the heater p is the manipulated variable. Only T1 and w are measured. Also, it
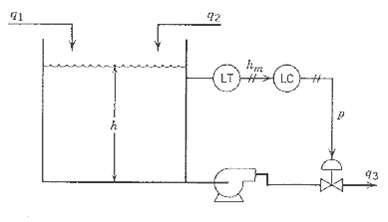
Consider the liquid storage system of Exercise 15.4 but suppose that the band valve for qs is replaced by a pump and a control valve (cf. Fig). Repeat parts (a) through (c) of Exercise 15.4 for the situation where qs is the manipulated variable and q2 isconstant.
Shinskey (1996, p. 279) has stated that in tuning a feedforward controller consisting of the lead?lag unit in Eq. 15-29, the integral of the error signal ??0?e(t) dt is zero when the difference between the lead and lag parameters, T1 ? T2 , is correct. Verify this assertion for the process model of
Repeat Exercise 15.5 for the situation where both Gp and Gd contain a one-minute time delay
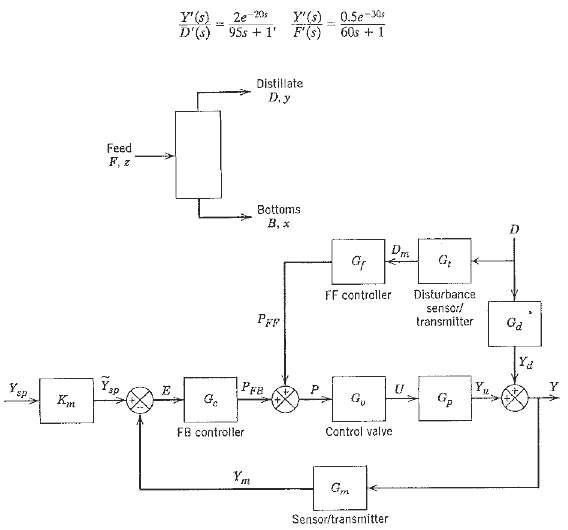
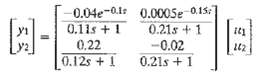
The distillation column in Fig has the following transfer function model: With Gv = Gm = Gt = l (a) Design a feedforward controller based on a steady-state analysis. (b) Design a feedforward controller based on a dynamic analysis. (c) Design a PI feedback controller based on the Direct Synthesis
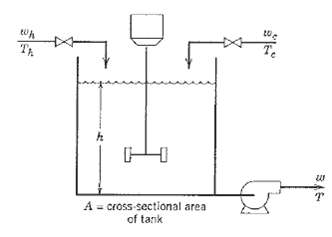
A feedforward only controller system is to be designed for the stirred-tank heating system shown in Fig E. Exit temperature T will be controlled by adjusting coolant flow rate, qc. The chief disturbance variable is the inlet temperature Ti which can be measured on-line. Design a feedforward-only
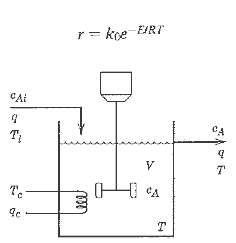
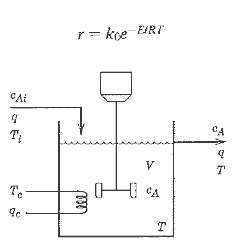
An irreversible liquid phase reaction, A?B, takes place in a stirred-tank reactor, as shown in Fig. E.?The reaction is zero order, and thus (he rate of reaction does not depend on the concentrations of A or B. The rate of reaction, r (mols of A reacting/cu ft h), is given by where k0 and E are
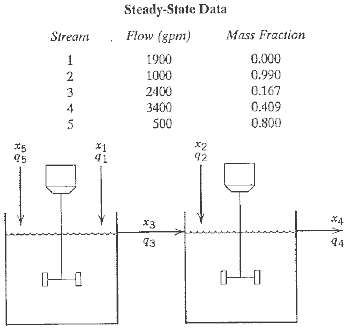
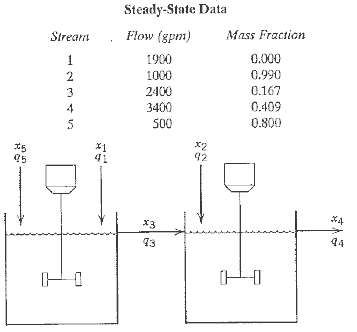
It k desired to design a feedforward control scheme in order to control the exit composition X4 of the two tank blending system shown in Fig. E . Flow rate q2 can be manipulated, while disturbance variables q5 and x5, can be measured. Assume that controlled variable X4 cannot be measured and that
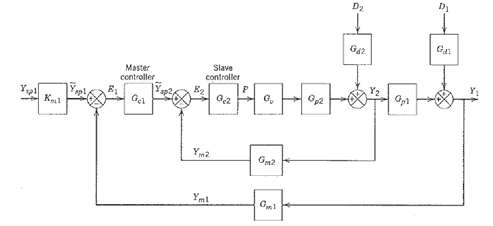
Measurement devices and their dynamic5 influence design of feedback controllers. Briefly indicate which of the two systems below would have its closed- loop performance enhanced significantly by application of cascade control (see Fig for notation and assume Gp2 = 1 artd Gdl = Gpt). Using the
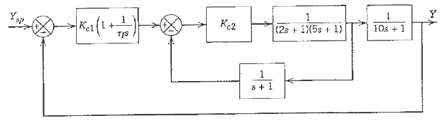
In Example 16.1, the ultimate gain for the primary controller was found to be 43.3 when Kc2 = 5.(a) Derive the closed-loop transfer functions for Y1/D1 and Y1/D2 as a function of Kc1 and Kc2.(b) Examine the effect of Kc2 on the critical gain of Kc1 by varying Kc2 from 1 to 20, For what values of
Consider the cascade control system in Fig. E. (a) Specify Kc2 so that the gain margin ?1.7 and phase margin ?30 ? for the slave loop. (b) Then specify and Kc1 and ?I?for the master loop using the Ziegler-Nichols tuning relation.
Solve Exercise 16.3 using MATLAB, but use IMC tuning rules for both the master and slave controllers. Design Kc2 first and then use that value to design Gc1 (PI controller). The higher-order transfer function will need to be approximated first by a FOPTD model using a step test. Plot closed-loop
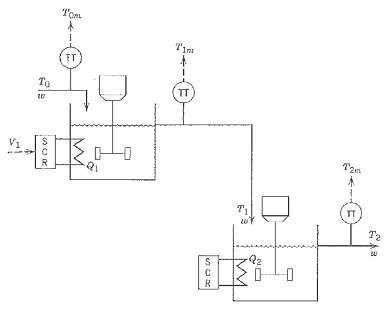
Consider the stirred-tank heating system shown in Fig. E. It is desired to control temperature T2 by adjusting the heating rate Q1 (Btu/h) via voltage signal V1 to the SCR. It has been suggested that measurements of T1 and To, as well as T2, could provide improved control of T2. (a) Briefly
A cascade control configuration is sometimes used to separate different objectives of feedback control. For instance, first an inner loop can be used to stabilize the process, and then an outer loop can be used to control the output to track set-point changes and reject disturbances. An example of
Design a time-delay compensator (Smith predictor) for when Gv = Gm 1. Show closed-loop responses for unit set-point and disturbance changes and Gc = Kc =1.
Shinskey (1994) has proposed a delay-time compensator of the form,for a FOPTD process, with Kc = 1/Kp and ?I = ?.(a) Derive the closed-loop transfer function and show that the time delay is eliminated from the characteristic equation.(b) Will the closed-loop response exhibit overshoot?
Applepolscher has designed a Smith predictor with proportional control for a control loop that regulates blood glucose concentration with insulin flow. Based on simulation results for a FOPTD model, he tuned the controller so that it will not oscillate. However, when the controller was implemented,
The closed-loop transfer function for the Smith predictor in Eq. 16-22 was derived assuming no model error.(a) Derive a formula for Y/Ysp when Gp ≠ Gp. What is the characteristic equation?(b) Let Gp = 2e-2s/(5s + 1). A proportional controller with Kc = 15 and a Smith predictor are used to control
A Smith predictor is to be uses with an integrator- plus-time-delay process, G(s) = 2/S e-3s. For a unit step disturbance and Gd = G, show that PI control will not eliminate offset even when the model is known perfectly. Use Eq. 16-24 as the starting point for youranalysis.
In Chapter 12, we introduced the Direct Synthesis design method in which the closed-loop servo response is specified and the controller transfer functions are calculated algebraically. For an IMC controller, show that setting G+ = e-θs leads to a Smith predictor controller structure when G = G
A CSTR Is used to produce a specialty chemical. The reaction is exothermic and exhibits first-order kinetics. .Laboratory analyses for the product quality are time consuming, requiring several hours to complete. No on-line composition measurement has been found satisfactory. It has been suggested
The pressure of a reactor vessel can be adjusted by changing either the inlet or outlet gaseous flow rate. The outlet flow is kept fixed as long as the tank pressure remains between 100 and 120 psi, and pressure changes are treated by manipulating the inlet how control valve. However, if the
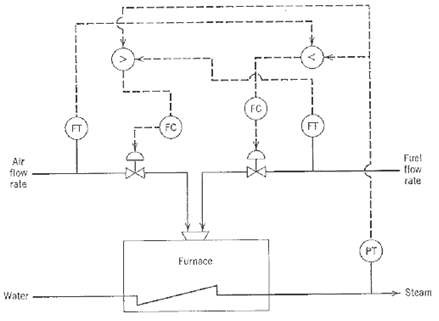
Selectors are normally used in combustion control systems to prevent unsafe situations from occurring. Figure E. shows the typical configuration for high and low selectors are applied to air and fuel flow rates. The energy demand signal comes from the steam pressure controller. Discuss how the
Buckley et al. (l985) discuss using a selector to control condensate temperature at 100oC in a reflux drum, where the manipulated variable is the cooling water flow rate. If the condensate temperature becomes too low, the temperature controller reduces the cooling water flow rate, causing the
For many chemical and biological processes, the steady-state gain changes when a process operating condition such as throughput changes. Consider a biomedical application where a drug flow rate is used to control blood pressure. The steady-state gain Kp varies with the manipulated variable u
The product quality from a catalytic tubular reactor is controlled by the (low rate of the entering stream, utilizing composition measurements from a process gas chromatograph. The catalyst decays over time and once its overall activity drops below 50%, it must be recharged. Deactivation usually
A second-order process is controlled by a PID controller. The desired closed-loop servo transfer function is and the process model is (a) Derive a control law that shows how adjust Kc, ?I, and ?D based on variations in Kp, ?I and ?2 and the desired closed-loop time constant ?c. (b) Suppose ?I =
The Ideal Gas Company has a process that requires an adaptive PI controller, but (he company capital budget has been frozen. Appelpolscher has been given the job to develop a homegrown, cheap adaptive controller. It has been suggested that the closed-loop response after a disturbance can be studied
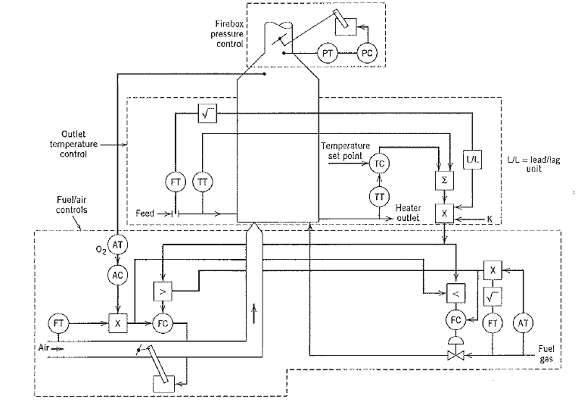
An instrumentation diagram for a fired heater control system is shown in Fig. E. Identify advanced control strategies based on material from Chapters 15 and 16. Discuss the rationale for each advancedmethod.
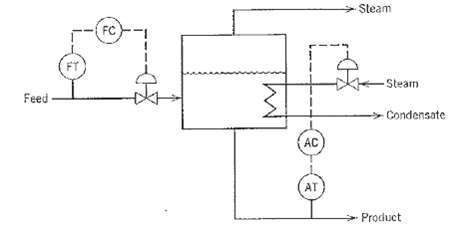
A liquid is concentrated by evaporating water in an evaporator. The available measurements and control valves are shown in Fig. E. During normal operation, the concentration controller output Pac is less than or equal to 80%. Also, the product concentration is to be controlled by adjusting the
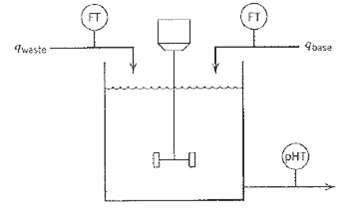
A waste stream (dilute nitric acid) is neutralized by adding a base stream (sodium hydroxide) of known concentration to a stirred neutralization tank, as shown m Fig. E. The concentration and the flow rate of the waste acid stream vary unpredictably. The flow rates of the waste stream and base
Flow control loops are usually fast compared to other loops, and so they can be considered to be at steady state (essentially). In this case, integral control is recommended, Show that for Gd = Gp = Kp, integral control provides satisfactory control for both set- point changes and disturbances.
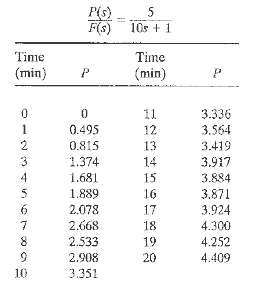
The mean arterial pressure P in a patient is subjected to a unit step change in feed flow rate F of a drug. Normalized response data are shown below. Previous experience has indicated that the transfer function, provides an accurate dynamic model. Filler these data using an exponential filter with
Show that the digital exponential filter output can be written as a function of previous measurements ym(k) and the initial filter output yF(0).
A signal given by is to be filtered with an exponential digital? filter over the interval 0 ? t ? 20. Using three different values of a (0.8, 0.5, 0.2), find the output of the filter at each sampling time. Do this for sampling periods of 1.0 and 0.1. Compare the three filters for each value of ?t.
The following product quality data ym were obtained from a bioreactor, based on a photometric measurement evaluation of the product: (a) Filter the data using an exponential filter with ?t = 1 mm. Consider a = 0.2 and a = 0.5. (b) Use a moving average filter with N* = 4. (c) Implement a noise-spike
The analog exponential filter in Eq. 17-4 is used to fitter a measurement before it is seat to a proportional controller with Kc = 1. The other transfer functions for the closed-loop system are Gv = Gm = 1, and Gp?=?Gd = 1/(5s + 1). Compare the closed-loop responses to a sinusoidal disturbance,
Consider the fist-order transfer function Y(s)/U(s) = l/(s +1). Generate a set of data (t = 1,2, . . . 20) by integrating this equation for u = 1 and randomly adding binary noise to the output, ±0.05 units at each integer value of t. Design a digital filter for this system and compare the filtered
Find the response y(k) for the difference equationLet y(0) = y(1) = 0,u(0) = 1,u(k) = 0for k ? 1. Perform direct integration using a spreadsheet. What is the steady-state value of y?
The dynamic behavior of a temperature sensor and transmitter can be described by the FOPTD transfer function where the time constant and time delay are in seconds and: T’ = actual temperature (deviation) T’m = measured temperature (deviation) The actual temperature changes as follows (t in
The discrete transfer function of a process is given by(a) Calculate the response y(k?t) to a unit step change in u using simulation of the difference equation.(b) Check your answer in (a) by using Simulink).(c) What is the steady-state value of y?
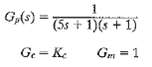
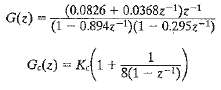
A dissolved oxygen analyzer in a bioreactor is used to provide composition measurements at each sampling time in a feedback control loop. The open-loop transfer function is given by (a) Suppose that a sampling period of ?t = 1 min is selected. Derive Gc(z) using a backward-difference
The discrete transfer function of a process is given by (a) Convert this transfer function to an equivalent difference equation. (b) Calculate the response y(k) to a unit step change in u using simulation of the difference equation. (c) Check your answer in (a) by using Simulink. (d) What is the
To determine the effects of pole and zero locations, use Simulink to calculate the unit step responses of the discrete transfer functions shown below for the first six sampling instants, k = 0 to k = 5. What conclusions can you make concerning the effect of pole and zerolocations?
A process operation under proportional-only digital control with ?t =1 has:Determine whether the controlled system is stable by calculating the response to a set-point change using Simulink.
Determine how the maximum allowable digital controller gain for stability varies as a function of & for the following system:Use ?t = 0.01, 0.1, 0.5, and trial and error (with Simulink) to find the maximum Kc for each ?t; Kc can range between 10 and 1200. What do you conclude about how sampling
A temperature control loop includes a second order overdamped process described by the discrete transfer function and a digital Pt controller. Find the maximum controller gain Kcm for stability bytrial-and-error.
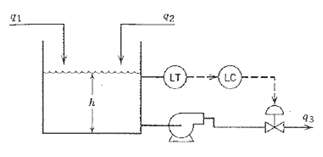
A digital controller is used to control the liquid level of the storage tank shown in Fig. The control valve has negligible dynamics and a steady-state gain, kv = 0.1 ft3/(min)(mA). The level transmitter has a time constant of 30 s and a steady-state gain of 4 mA/ft. The tank is 4 ft in diameter.
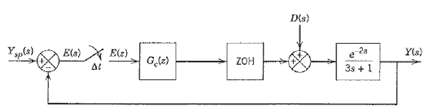
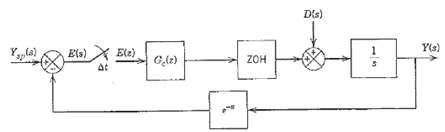
The block diagram of a digital control system is shown in Fig. The sampling period is ?t 1 min.(a) Design the digital controller Gc(z) so that the closed-loop system exhibits a first-order response to a unit step change in the set point (after an appropriate lime delay).(b) Will this controller
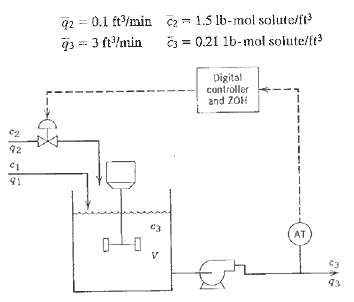
The exit composition C3 of the blending system in Fig is controlled using a digital feedback controller. The exit stream is automatically sampled every minute, and the composition measurement is sent from the composition transmitter (AT) to the digital controller. The controller output is sent to
The block diagram of a sampled-data control system is shown in Fig. E. Design a Dahlin controller Gc(z) that is physically realizable and based un a change in set point. The sampling period is ?t = 1 min. Calculate the dosed-loop response when this controller is used and a unit step change in
It is desired to control the exit temperature T2 of tie heat exchanger shown in Fig. E. by adjusting the steam flow rate ws. Unmeasured disturbances occur in inlet temperature T1. The dynamic behavior of the heat exchanger can be approximated by the transfer function. Where the time constant has
A second-order system G with K = 1, τ1 = 6, and τ2 = 4 is to be controlled using the Vogel-Edgar controller with λ = 5 and ∆t = 1. Assuming a step change in ysps, calculate the controlled variable y(k) for k = 0,1,., 25 and plot y(k) and the controller output p(k).
Compare PID (ITAE for set-point changes) and Dahlin controllers for ∆t 1, λ = 1, and G(s) = 2e-s/(l0s + 1). For the ITAE controller, approximate the sampler and ZOH by a time delay equal to ∆t/2. Adjust for ringing, if necessary. Plot the closed-loop responses for a set-point change as well as
For a process, G(s) 1.25e-5s(5s + 1), derive the equation for Dahlin’s controller with ∆t and λ = 1 and plot controller output p(k) for a set-point change. Does ringing occur?
Compare the Dahlin and Vogel-Edgar controllers for G(s) = 1/[(2s + 1)(s + 1)] and λ = ∆t = 1. Does either controller ring? Derive the resulting difference equations for the closed-loop system y(k) related to ysp,(k). Does overshoot occur in either case?
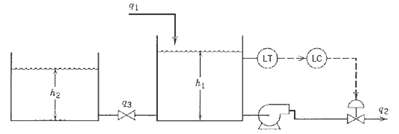
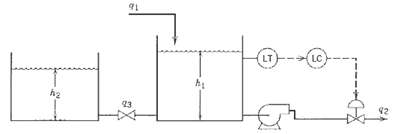
Design a digital controller for the liquid level in the storage system shown in Fig. E. Each tank is 2.5 ft in diameter. The piping between the tanks acts as a linear resistance to flow with R = 2 min/ft2. The liquid level is sampled every 30 s. The digital controller also acts as a zero-order hold
Feedforward control applications often utilize a controller that consists of a lead-lag unit:Develop expressions for the controller output at the kth sampling instant p(k) using the backward difference approximation of the derivatives involved in Gf(s). Compare the discrete-time unit step response
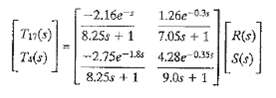
Luyben and Vinante developed a distillation column model relating temperatures on the 4th and 17th trays from the bottom of the column (T4, T17,) to the reflux ratio R and the steam flow rate to the reboiler S:Compare the closed-loop set-point changes that result from the T17-R/T4-S pairing and the
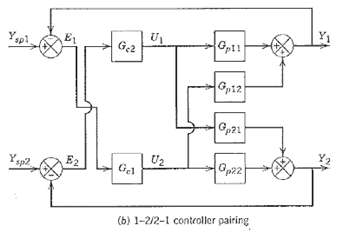
Derive an expression for the characteristic equation for the 1-2/2-1 configuration in Fig. Simplify and interpret this equation for the special situation where either Gp11, or Gp22 is zero.
Derive equivalent closed-loop formulas to (18.9) through (18-11) for the case where there are sensor transfer functions (Gm1, Cm2) for each output (y1, y2).
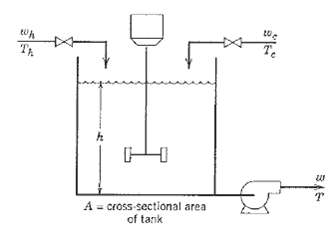
Consider the stirred-tank heating system of Fig and assume that the manipulated inputs are wh and w. Suggest a reasonable pairing for a multiloop control scheme and justify youranswer.
For the in-line blending system of Example 18.9, draw block diagrams for two multiloop control schemes:(a) The standard scheme for x 0.4.(b) The less interacting scheme where u1 WA + wB and U2 = WA.You may assume that each transmitter and control valve can be represented by a first-order transfer
A conventional multiloop control scheme consisting of two PI controllers is to be used to control the product compositions xD and xB of the distillation column shown in Fig. The manipulated variables are the reflux flow rate R and the steam flow rate to the reboiler S. Experimental data for a
For the Wood-Berry distillation column model in Example 18.1;(a) Which pairing of controlled and manipulated variables would you recommend based on steady-state considerations?(b) Which pairing based on dynamic considerations? Justify your answers.
A dynamic model of the stirred-tank heating system in Fig was derived in Chapter 6. Use this model to do the following: (a) Derive an expression for the relative gain array. (b) Design art ideal decoupling control system assuming that the transmitters and control valves have negligible
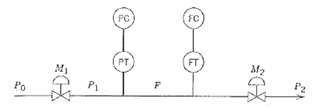
A binary distillation column has three tray temperature measurements (17th, 24th, 30th trays) that can be used as possible controlled variables. Controlling temperature is equivalent to controlling composition. Step testing gives the following steadystate input- output relationships (uI = steam
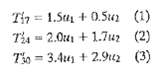
For the liquid storage system shown in Fig. E, it is desired to control liquid levels h1 and h2 by adjusting volumetric flow rates q1 and q2. Flow rate q6 is the major disturbance variable. The flow-bead relations arc given by where Cv1, Cv2, and K are constants.(a) Derive an expression for the
For the Liquid level storage system in Exercise 18.l0: (a) Derive a transfer function model of the form,Y(s) = Gp(s)U(s) + Gd(s) D(s)where D is the disturbance variable and Gd is a 2×1 matrix of disturbance transfer functions.(b) Draw a block diagram for a multiloop control system based on the
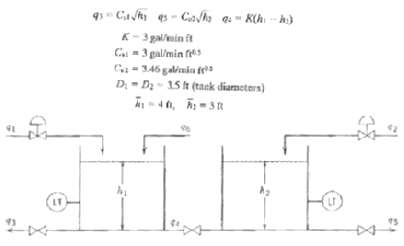
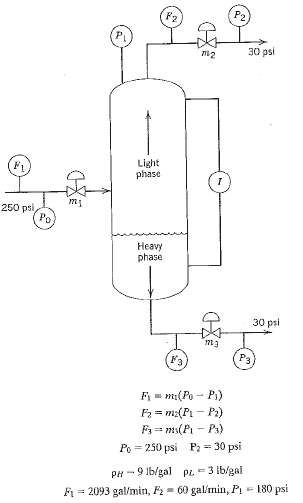
For the flow-pressure process shown in Fig. E, it is desired to control both pressure P1 and flow rate F. The manipulated variables are the stern positions of the control valves, M1 and M2. For simplicity assume that the flow-head relations for the two valves are given by F = 20M1(P0 ? P1) F =
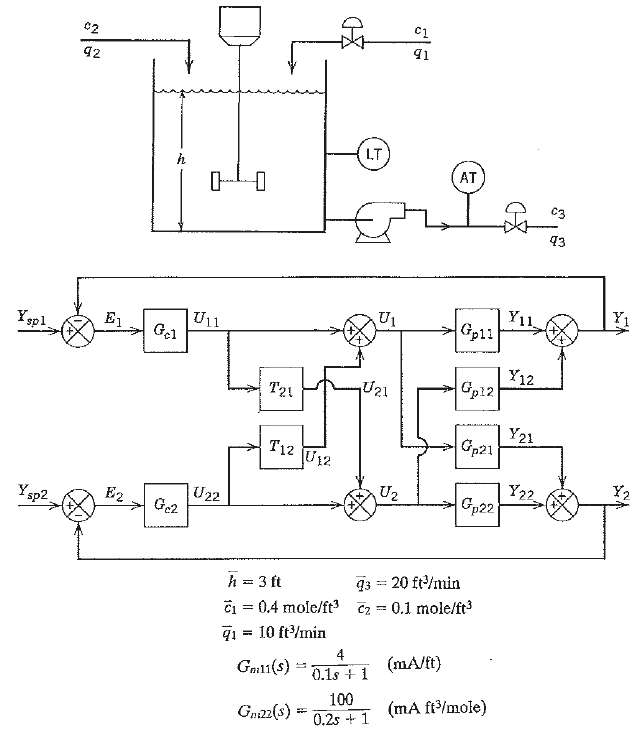
A blending system is shown in Fig. E. Liquid level h and exit composition c3 are to be controlled by adjusting flow rates q1 and q3. Based on the information below, do the following: (a) Derive the process transfer function matrix, Gp(s). (b) If a conventional multiloop control system is used,
A decanter shown in Fig. E. is used to separate a feed that consists of two completely immiscible Liquids, a light component and a heavy component. Because of the large difference in their densities, the two components from separate liquid phases very rapidly after the feed enters the decanter, the
A process to be controlled has two controlled variables Y1 and Y2, and three inputs that can be used as manipulated variables, U1, U2, and U3. However, it is desired to use only two of these three manipulated variables in a conventional multiloop feedback control system. Transfer functions for the
A process control engineer has decided to install an automated shower control system in a bathroom of hr mansion. The design calls for a system that can deliver 3 gpm of water at 110°F by mixing hot water at 170oF, with colder water at 80oF, Flow and temperature transmitters are available along
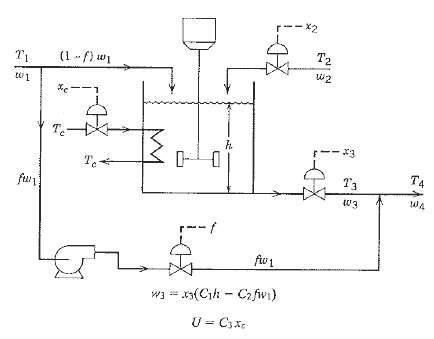
A stirred-tank heat exchanger with a bypass stream is shown in Fig. E. with the available control valves. The possible manipulated variables are: mass flow rate w2, valve stem positions xc and x3, and f, the fraction of mass flow rate w1 that bypasses the tank before being added to the exit stream.
Evaluate the performance and robustness of alternative decoupling control systems. In particular, robustness to errors in the assumed process model will be of interest. Use MATLAB to simulate the Wood-Berry distillation column model in Example 18.1. Perform a computer simulation of the controlled
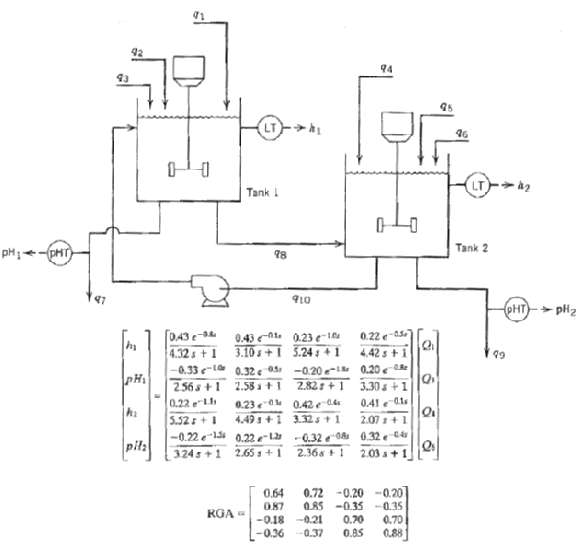
A schematic diagram for a pH neutralization process is shown in Fig. E. The transfer function matrix and relative gain array are also shown. (a) Suppose that a multiloop control system consisting of four PID controllers is to be designed. Recommend a pairing of controlled and manipulated variables.
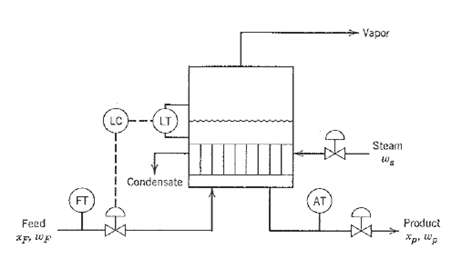
A control scheme is to be developed for the evaporator shown hi Fig. E, The feed and product streams are mixtures of a solute and a solvent, while the vapor stream is pure solvent. The lquid level is tightly controlled by manipulating the feed flow rate, wF. The product composition. xp, and the
A combination of two drugs (hydrochlorothiazide and oxybutynin) is commonly used to regulate blood pressure in elderly patients. These two drugs mainly affect two physiological variables of the patient (blood pressure and urine production late). Since the goat is to regulate both variables with
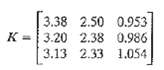
A rapid thermal processing system for microelectronic manufacturing uses three concentric lamp heater arrays to keep the wafer temperature uniform. The gain matrix for the system is:The system experiences difficulties in controlling all three temperatures uniformly. Examine possible control
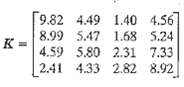
A 4 ? 4 control system has the following gain matrix: Assess the potential difficulty of control using singular value analysis. Should any outputs or inputs be eliminated to achieve better control?
A laboratory filtration study has been carried out at constant rate. The filtration time (tf in hours) required to build up a specific cake thickness has been correlated astf = 5.3 xie-3.6xi+2.7where xi = miss fraction solids in. the cake. Find the value of x that maximizes tf using quadratic
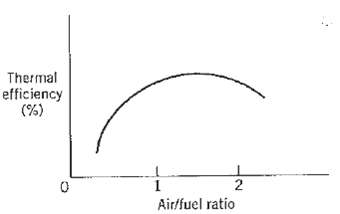
The thermal efficiency of a natural gas boiler versus air/fuel ratio is plotted in Fig. E. Using physical arguments, explain why a maximum occurs.
A plasma etcher has a yield of good chips that is influenced by pressure (X1) and gas flow rate X2). Both X1 and X2 arc scaled variables (0 ? Xi ? 2). A model has been developed based on operating data as follows:Use Excel to maximize yield Y, using starting points of (1,1) and (0,0).
A specialty chemical is produced in a batch reactor. The tune required to successfully complete one batch of product depends on the amount charged to (and produced from) the reactor. Using reactor data, a correlation is 2.0P0.4, where P is the amount of product in pounds per batch and t is given in
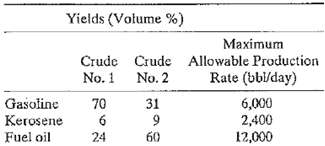
A refinery processes two crude oils that have the yields shown in the following table. Because of equipment and storage Limitations, production of gasoline, kerosene, and fuel oil must be limited as shown below. There are no plant limitations on the production of other products such as gas oils.
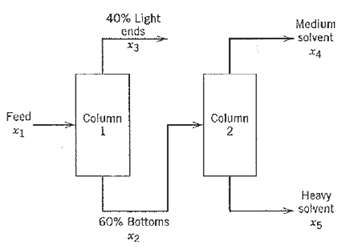
Linear programming is to be used to optimize the operation of the solvent splitter column shown in Fig E. The feed is naphtha, which has a value of $40/bbl in its alternate use as a gasoline blending stock. The light ends sell at $50/bbl, while he bottoms are passed through a second distillation
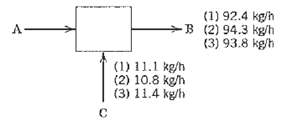
Reconciliation of inaccurate process measurements is an important problem in process control that can be solved using optimization techniques. The flow rates of streams B and C have been measured three times during the current shift (shown in Fig. E). Some errors in the measurement devices exist.
A reactor converts reactant BC to product CB by heating the material in the presence of an additive A (mole fraction = xA). The additive can be injected into the reactor, while steam can be injected into a heating coil inside the reactor to provide heal. Some conversion can be obtained by heating
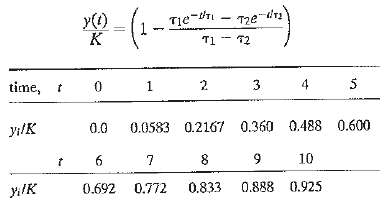
Optimization methods can be used to fit equations to data. Parameter estimation involves the computation of unknown parameters that minimize the squared error between data and the proposed mathematical model. wThe step response of an overdamped second- order dynamic process can be described using
A brewery has the capability of producing a range of beers by blending existing stocks. Two beers (suds and premium) are currently available, with alcohol concentrations of 3.5% for suds and 5.0% for premium. The manufacturing cost for suds is $0.25/gal, and for premium it is $0.40/gal. In making
A specialty chemicals facility manufactures two products A and B in barrels. Products A and B utilize thy same raw material; A uses 120 kg/bbl, while B requires 100 kg/bbl. There is an upper limit on the raw material supply of 9000 kg/day. Another constraint is warehouse storage space (40 m2 total;
Supervisory control often involves the optimization of set points in order to maximize profit. Can the same results be achieved by optimizing PID con- trotter tuning (Kc, τ1, τD), in order to maximize profits? Ate regulatory (feedback) control and supervisory control complementary?
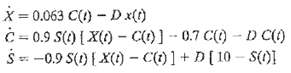
A dynamic model of a continuous-flow, biological chemostat has the form where X is the biomass concentration, S is the substrate concentration, and C is a metabolic intermediate concentration. The dilution rate, D, is an independent variable, which is defined to be the flow rate divided by the
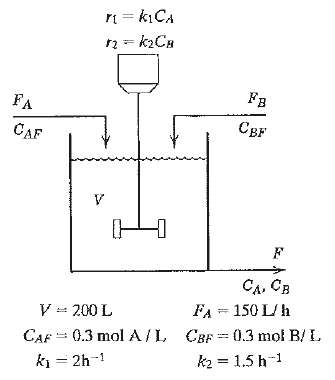
A reversible chemical reaction, A ? B, occurs in the isothermal continuous stirred-tank reactor shown in Fig. E. The rate expressions for the forward and reverse reactions are: Using the information given below, use a numerical search procedure to determine the value of FB (L/h) that maximizes the
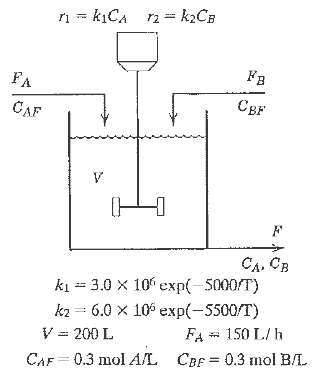
A reversible chemical reaction, A ? B, occurs in the isothermal continuous stirred-tank reactor shown in Fig. E. The rate expressions for the forward and reverse reactions are: where the rate constants have the following temperature dependence:Each rate constant has units of h-1, and T is in
For the transfer functions(a) Derive an analytical expression for the step response to a unit step change. Evaluate the step-response coefficients, {Si}, for a sampling period of ?t =1.(b) What value of model horizon N should be specified In order to ensure that the step-response model covers a
A process (including sensor and control valve) can be modeled by the transfer function,(a) Derive an analytical expression for the response to a unit step change in the input.(b) Suppose that the maximum allowable value for the model horizon is N = 30. What value of the sampling period ?t should be
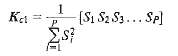
Control calculations for a control horizon of M = 1 can be performed either analytically or numerically. For the process model in Exercise 20.1 derive Kc1 for ?t = 1, N = 50, and P = 5, using Eq. 20-58. Compare your answer with the analytical result reported by Maurath et al. (1988):3
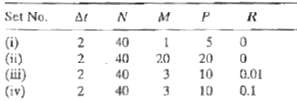
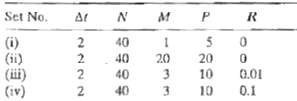
Consider the transfer function model of Exercise 20.1. For each of the four sets of design parameters shown below, design a model predictive controller. Then do the following: (a) Compare the controllers for a unit step change in set point. Consider bath they and u responses. (b) Repeat the
Showing 1900 - 2000
of 6778
First
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Last
Step by Step Answers